На отечественных железных дорогах работают путерихтовочные устройства системы МИИТа, оборудованные на базе электробалластеров, и специализированная путерихтовочная машина системы В. X. Балашенко. Обе машины непрерывного действия и выполняют работу по программе, заранее составленной индивидуально для каждой кривой. На строящихся дорогах применяют путерихтовочную машину циклического действия системы ЦНИИ МПС.
Рис. 126. Рихтующее устройство на электробалластере ЭЛБ-1
Принцип действия применяемого в настоящее время на ряде дорог рихтующего устройства на ЭЛБ-1 (рис. 126) состоит в том, что каждая точка пути в процессе рихтовки сдвигается машиной на определенную величину в соответствии с программой. Для составления программы рихтовки кривой вначале определяют ее фактическое положение в плане, измеряя стрелы изгиба, затем рассчитывают проектные сдвиги, после чего строят командный график.
На рис. 127 сплошными линиями показано положение пути и хорды, при помощи которой замеряют стрелу в точке п до рихтовки пути в точке п — 1, а пунктирными линиями — положение пути и хорды после сдвижки точки п — 1 на проектную величину βπ—1 ·
Из рис. 127 видно, что в момент установки точки п — 1 в проектное положение стрела в точке п должна быть равна
![]() (37)
(37)
где hn — стрела в точке п до рихтовки.
Аналогично подсчитывают рабочие стрелы Яр во всех остальных точках пути. Полученные расчетные стрелы являются ординатами командного графика.
Путь рихтуется машиной в одном направлении: от точки п — 1 к точке п (см. рис. 127). Когда рихтуется точка п, хорда располагается между точками п и п + 2, а замер производится в точке п + 1.
Таким образом, величину сдвига каждой точки измеряют относительно двух других точек, расположенных впереди на неотрихтованном пути.
Измерение стрел изгиба как до рихтовки, так и в процессе этой работы производится механическим стрелографом. Роль хорды в этом стрелографе выполняет металлическая рама длиной 20 ж, расположенная под фермой № 1 электробалластера. Концы этой рамы во время работы опираются на двухколесные тележки.
Посередине рамы хорды расположен лентопротяжный механизм, барабан которого приводится в движение от катка, катящегося по упорной рельсовой нити. На каждые 10 м пройденного пути барабан протягивает 5 см ленты (продольный масштаб 1 : 200). Около лентопротяжного механизма расположена следящая тележка, которая может свободно перемещаться в поперечном направлении относительно рамы-хорды. На тележке укреплен карандаш, вычерчивающий на бумаге лентопротяжного механизма непрерывный график стрел изгиба измеряемой рельсовой нити.
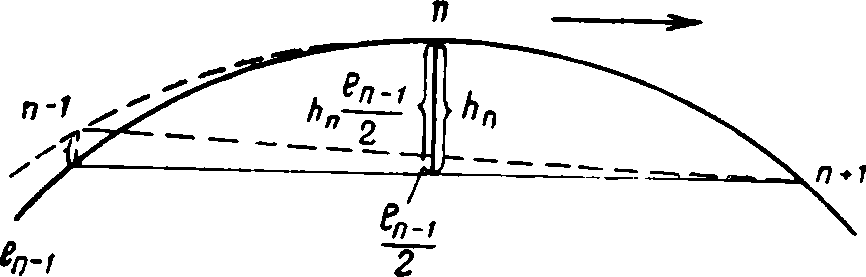
Рис. 127. Принципиальная схема работы рихтующего устройства системы МИИТа
Сдвижка пути производится механизмом рихтовки электробалластера, который дооборудован для этой цели специальными роликами, жестко укрепленными на поперечной балке механизма подъема, и электромагнитным редуктором для быстрого изменения направления сдвижки пути.
Перед выездом на рихтовку в лентопротяжный механизм помещают командный график стрел. По приезде на место устанавливают машину так, чтобы следящая тележка расположилась над первой точкой деления пути. Одновременно устанавливают командный график стрел так, чтобы карандаш лентопротяжного механизма расположился над точкой № 1. После зарядки машины, заключающейся в том, что тележки стрелографа прижимаются к упорной рельсовой нити, и электромагниты балластера поднимают рельсо-шпальную решетку на 2—3 см, машина начинает двигаться со скоростью 2—3 км/ч. В это время оператор внимательно следит за положением карандаша на командном графике. Если карандаш расположен на кривой графика, то это свидетельствует о том, что фактическая стрела во время рихтовки равна программной, а следовательно, путь под рихтующим механизмом находится в проектном положении. Как только указанное равенство фактических и программных стрел нарушается, что обнаруживается смещением карандаша с кривой графика, оператор дистанционно включает механизм сдвига так, чтобы путь сдвинулся в соответствующую сторону на величину, при которой нарушенное равенство стрел восстановится и карандаш вернется на кривую командного графика.
С целью повышения точности и скорости рихтовки пути, а также улучшения условий работы бригады, обслуживающей машину, создан опытный экземпляр нового рихтующего устройства на ЭЛБ-1 с двумя струнными стрелографами, гидравлическим механизмом сдвига и специальным прижимным устройством.
Один из стрелографов является рабочим, им замеряются стрелы во время рихтовки. Эти замеры служат для сравнения с программными стрелами и выработки команды механизму сдвига. Второй стрелограф служит для замера состояния пути после рихтовки. Запись стрел, замеряемых обоими стрелографами, осуществляется дистанционно в будке управления.
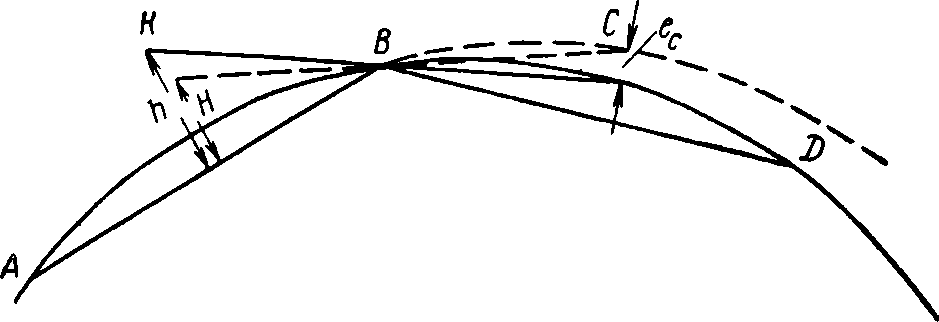
Рис. 128. Принципиальная схема работы путерихтовочной машины системы В. X. Бал а шеи ко
Новым рихтующим устройством можно производить рихтовку пути на основе предварительного замера пути машиной или вручную. Кроме того, им можно производить рихтовку и без замера состояния пути перед рихтовкой — по программе, составленной на основе паспортных данных.
Машина В. X. Балашенко состоит из двух шарнирно соединенных ферм и поворотного рычага (рис. 128). Фермы покоятся на трех ходовых двухосных тележках специальной конструкции. Поворотный рычаг шарнирно укреплен на средней тележке.
Передняя ферма АВ выполняет роль хорды, относительно которой замеряются ординаты конца поворотного рычага КС. Конечными точками хорды являются шкворни первой и средней ходовых тележек.
Для прижатия ходовых тележек к упорной рельсовой нити имеются специальные устройства. Под передней фермой смонтирован стрелограф с хордой длиной 10 ж, служащий для замера состояния пути до рихтовки.
На задней ферме смонтированы подъемное устройство с электромагнитами для подъемки пути во время рихтовки на 10—15 мм, гидравлический механизм сдвига и силовая установка для питания электроэнергией всех двигателей машины.
Принцип работы этой машины такой же, как и рихтующего устройства наЭЛБ-1с механическим стрелографом в виде рамы-хорды. В начале путь замеряется машиной, в результате чего получают непрерывный график ординат, восстановленных от точки К поворотного рычага до продольной оси фермы АВ, и график стрел, замеренных стрелографом с хордой в 10 м. По данным этого графика производят расчет кривой, определяют проектные сдвиги и ординаты Н, которые должны быть во время рихтовки, когда ферма АВ располагается на неотрихтованном участке, а точка пути, над которой находится точка С поворотного рычага, будет в проектном положении.
Значения ординат Н определяются по формуле
![]() (38)
(38)
где h — ордината конца поворотного рычага до рихтовки пути; ес — проектная величина сдвига точки С;
У1Г — отношение плеч поворотного рычага.
График величин Н представляет собой программное задание и помещается на лентопротяжный механизм записи ординат конца поворотного рычага. Во время работы оператор управляет механизмом сдвига, следя за тем, чтобы карандаш механизма записи ординат все время находился на кривой программного графика.
За рубежом, помимо описанных ранее машин, выполняющих рихтовку пути, одновременно с выправкой в профиле и уплотнением балласта под шпалами применяют специализированные машины точечного действия, останавливающиеся над каждым сдвигаемым сечением пути. Большинство машин самоходны, их транспортная скорость до 80 км/ч.
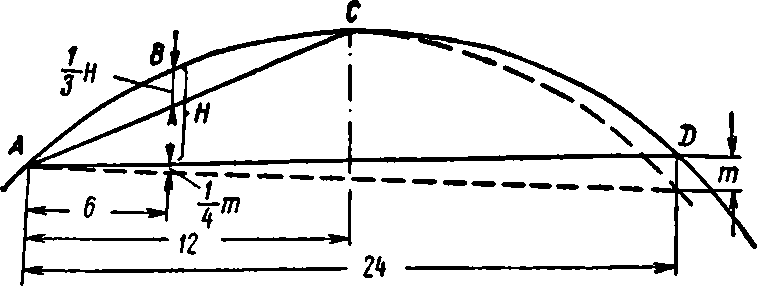
Рис. 129. Принципиальная схема работы машины AL-204
Наибольшее распространение получили специализированные путерихтовочные машины австрийской фирмы «Plasser und Теигег» типов AL-202, AL-203 и AL-204.
Измерения положения пути в плане эти машины производят по способу ^двух хорд. Работы ведут без предварительного составления программы, а величину и направление сдвига в каждой точке пути определяют во время работы. Замеры стрел от обеих хорд (рис. 129) ведутся в точке В. Поскольку длины хорды относятся как 1:2, то стрелы, замеряемые в точке В от обеих хорд, относятся как 1 : 3. (Точка В расположена посередине малой хорды и в четверти большой хорды.)
При рихтовке по методу двух хорд предварительно неизвестно, на сколько и в какую сторону будет отрихтовываться каждая точка пути. Поэтому при наличии на кривой неподвижной точки (моста, переезда и т. д.) рихтовку начинают с этой точки. Метод двух хорд неприменим при наличии нескольких неподвижных точек, переустройстве кривых или выправке сильно расстроенных кривых.
На переходных кривых указанное ранее соотношение стрел не сохраняется и конец короткой хорды в точке С смещается на величину, постоянную для данной переходной кривой и определяемую по формуле
![]()
(39)
где а — длина большой хорды в м;
R — радиус кривой в м;
z — длина переходной кривой в м.
Путерихтовочные машины AL-204 и другие реверсивны, оборудованы пятью тележками, прикрепленными к машине раздвижными штангами. Три тележки служат для натяжения и прижатия к упорной рельсовой нити одной длинной (24 м) и двух коротких хорд, остальные две тележки следящие. При величине рихтовки ± 10 мм производительность машины колеблется в пределах 240—280 м в час.