ГЛАВА VI
ПУТЕВЫЕ МАШИНЫ
§ 29. КЛАССИФИКАЦИЯ ПУТЕВЫХ МАШИН
Путевые машины в основном могут быть разделены на два класса (рис. 85): путевые машины на рельсовом ходу и с безрельсовым ходом. К последнему классу относятся транспортные средства (автомобили, тракторы) и стреловые краны, используемые обычно на базах в местах погрузки и выгрузки материалов. К этому же классу принадлежит очень ограниченное число машин, выполняющих некоторые путевые работы. Основная часть применяемых машин сконструирована на рельсовом ходу. Машины этого класса можно разделить на четыре группы: а) машины тяжелого типа; б) машины и механизмы легкого типа; в) контрольно-измерительные средства; г) транспортные средства и крановое оборудование.
Путевыми машинами тяжелого типа называют такие машины, которые во время выполнения путевых работ занимают перегон; для пропуска поезда их предварительно переводят на станцию.
Машины, которые передвигаются по рельсам, занимают путь только во время работы и для пропуска поезда могут быть убраны с пути на обочину, относят к машинам легкого типа (например, двухниточный путеподъемник). К этой же группе следует отнести и механизированный инструмент.
Машины тяжелого типа делят на четыре подгруппы; машины, выполняющие работы: а) по земляному полотну (путевой струг, прорезекопатели); б) с путевой решеткой (рельсоукладчики, путеукладчики, рихтовочная машина); в) с балластным слоем (электробалластер, щебнеочистительная машина, выправочно-подбивочно-отделочная); г) по снегоборьбе (снегоочистители и снегоуборочные машины).
Машины и механизмы легкого типа удобнее делить на подгруппы не по роду выполняемых функций, а по виду используемой энергии. Большинство машин и механизмов использует для работы электрическую энергию. Относительно недавно начали применять гидравлические механизмы (домкраты, рихтовщики, разгонщики); пневматические инструменты сейчас применяют только для работ на искусственных сооружениях (пескоструйные приборы, клепальные молотки). Небольшой удельный вес имеют машины с индивидуальным приводом.

Рис. 85. Схема классификации путевых машин
К контрольно-измерительным относят дефектоскопы и путеизмерители, которые могут быть съемными (смонтированы на тележках) и несъемными (смонтированы в вагонах).
Транспортные средства и крановое оборудование также бывает съемным и несъемным; среди несъемных машин этой группы следует выделить специализированные составы (хопперы-дозаторы, составы для перевозки плетей).
В последнее время созданы машины с автоматизированным управлением, но пока их число невелико.
§ 30. ЭЛЕКТРОБАЛЛАСТЕРЫ
Электробалластеры применяют для дозировки балласта и подъемки пути. В процессе дозировки балласта, т. е. разравнивания его по поверхности рельсо-шпальной решетки слоем определенной толщины, электробалластер перемещает выгруженный на обочину и в междупутье балласт на путь. При перевозке балласта в хопперах- дозаторах дозировка осуществляется при выгрузке его.
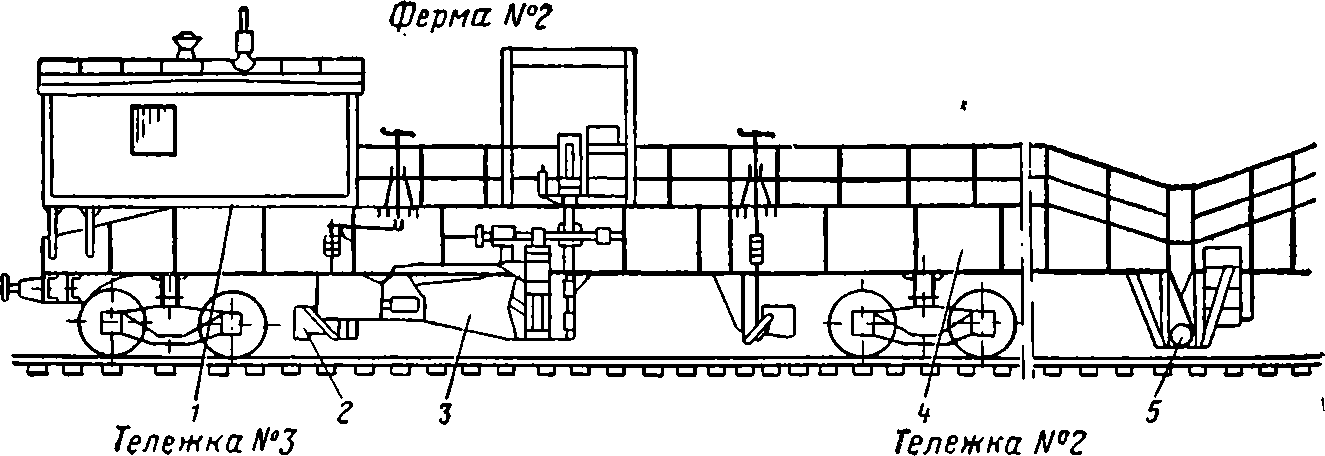

Рис. 86. Электробалластер ЭЛБ-1
1 —хозяйственная будка; 2 —рельсовые щетки; 3 — дозатор; 4 — ферма № 2; 5— междуферменный шарнир; 6—центральный пост управления; 7 —шпальные щетки; 5 —предохранительные захваты; 9 — балластерные рамы; 10— подъемное устройство; 11 — ферма № 1; 12 — электростанция
Во время подъемки пути балласт просыпается под рельсо-шпальную решетку и разравнивается там. Высота подъемки пути зависит от ряда причин, в том числе и от толщины слоя дозировки.
Кроме этих работ, электробалластером можно производить сдвижку пути, подъемку небольших пролетных строений и другие работы. Электробалластеры, оборудованные дополнительными устройствами, выполняют очистку щебня и рихтовку пути.
Электробалластер ЭЛБ-1 (рис. 86) состоит из двух ферм, одна из которых 4 (ферма № 2) является консольной и опирается на две ходовые тележки, а вторая 11 (ферма № 1) одной стороной опирается на ходовую тележку, а другой шарнирно соединена с фермой № 2. Такая конструкция обеспечивает образование между ходовыми тележками свободного пролета в 26—28 м (в зависимости от типа машины), что позволяет поднимать рельсо-шпальную решетку в вертикальной и сдвигать ее в горизонтальной плоскостях.
Соединены фермы междуферменным шарниром 5, обеспечивающим возможность вписывания машины в кривые как в плане, так и в профиле.
В путевом хозяйстве применяют три типа электробалластеров: ЭЛБ-1, ЭЛБ-3 и ЭЛБ-ЗМ, отличающихся друг от друга конструкцией отдельных узлов и мощностью ферм. Электробалластеры ЭЛБ-3 и ЭЛБ-ЗМ — машины более мощные, чем ЭЛБ-1. Рассмотрим конструкцию ЭЛБ-1, имеющую наибольшее распространение.
Электробалластер ЭЛБ-1 (см. рис. 86) оборудован двумя дозаторными устройствами 5, подъемным устройством 10, балластерными рамами 9, предохранительными захватами 5, рельсовыми 2 и шпальными 7 щетками, электростанцией 12, центральным постом управления 6 и хозяйственной будкой 1.
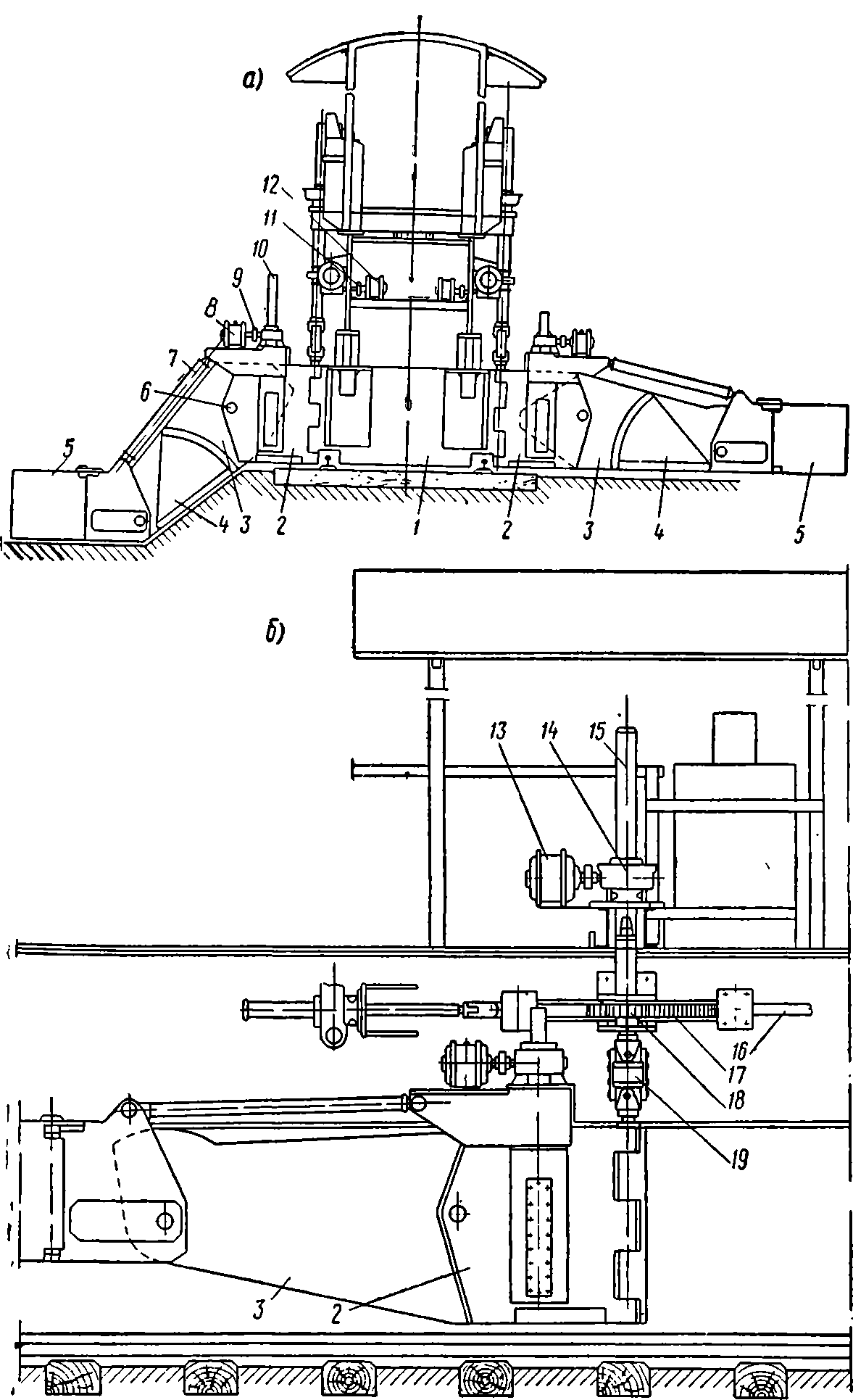
Рис. 87. Дозатор ЭЛБИ:
а—вид поперек пути; б—вид сбоку; 1 — щит; 2—корневая часть крыла; 3—средняя часть крыла; 4 — секторный нож; 5 —подкрылок; 6 — шарнир крыла; 7 —параллелограммная тяга; 8 и 9 — электродвигатель и редуктор механизма наклона крыла; 10 — винт механизма наклона крыла; 11 и 12 —редуктор и электродвигатель механизма поворота крыла; 13 и 14 — электродвигатель и редуктор механизма подъема крыла; 15 —винт механизма подъема крыла; 16, 17 и 18 — винт, рейка и шестерня механизма поворота крыла; 19— шарнир
Дозаторное устройство (рис. 87) состоит из двух крыльев, щита и механизмов подъема, поворота и наклона крыльев. Каждое крыло состоит из корня 2, средней части 3, подкрылка 5 и козырька. Присоединение подкрылка к средней части крыла, а последней к корню при помощи горизонтальных шарниров позволяет каждому крылу принять одно из очертаний, изображенных на рис. 87, и этим обеспечивать возможность перемещения балласта на путь как с обочины, так и с междупутья. Козырек соединен с подкрылком вертикальным шарниром, что позволяет установить его параллельно оси пути для исключения осыпания балласта на стороны при дозировке.
Корни крыльев вертикальными шарнирами соединены со щитом 1, что позволяет крыльям поворачиваться на 180°. В транспортном положении они расположены вдоль фермы машины, а в рабочем раскрыты под углом от 30 до 45° и удерживаются в этом положении растяжками.
Щит и крылья поднимаются и опускаются двумя механизмами, расположенными по концам щита. Каждый из этих механизмов состоит из электродвигателя 13, редуктора 14 и винта 15, соединенного со щитом шарниром 19. Электродвигатели обоих механизмов подъема могут включаться совместно от одной кнопки или раздельно. В первом случае щит и крылья поднимаются без перекоса, а во втором создается перекос, если необходимо с одной стороны пути увеличить слой задозированного балласта.
Толщина задозированного слоя балласта при достаточном количестве его равна просвету между поверхностью шпал и нижней гранью щита. Положение щита измеряется от уровня головок рельсов и указывается стрелками, прикрепленными к винтам 15, на шкалах, помещенных на ферме. Щит с корнями крыльев может быть опущен на 100 мм ниже или поднят на 250—350 мм выше уровня головок рельсов.
Механизм поворота каждого крыла состоит из электродвигателя 12, редуктора 11, винта 16, рейки 17 и шестерни 18. Последняя свободно надета на стержень винта 15 и соединена с ним шпонкой. При подъеме или опускании щита вместе с винтом шестерня 18 остается на месте. При повороте же шестерни, что имеет место при перемещении рейки 17, поворачивается и винт 15, а вместе с ним и крыло дозатора.
Механизм наклона каждого крыла расположен на корневой части и состоит из электродвигателя 8, редуктора 9 и винта 10, нижний конец которого закреплен в прорези консоли средней части крыла, входящей в корень крыла. Перемещение винта 10 вызывает изменение наклона крыла.
Чтобы при повороте средней части крыла относительно горизонтального шарнира 6 не наклонялась рабочая часть подкрылка 5, верхняя часть последнего параллелограммной тягой 7 шарнирно соединена с корнем крыла.
Для срезки балласта у концов шпал и оправки балластной призмы служат специальные ножи и оправочные щитки, укрепленные на средней части крыльев.
Во время работы положение щита 1 и угол раскрытия крыльев постоянны, а наклон крыльев можно изменять для регулировки количества захватываемого балласта. Например, если балласта
мало, то крылья наклоняют, чтобы подобрать с обочины и междупутья нужное количество балласта, так как при нехватке его толщина задозированного слоя, а следовательно, и высота подъемки окажутся в отдельных местах меньше расчетной.
С обеих сторон каждого дозатора (см. рис. 86) установлены рельсовые щетки 2, которые очищают головки рельсов от балласта и тем самым обеспечивают безопасность движения экипажей по задозированному пути. Рельсовые щетки поднимаются или опускаются винтовым механизмом вручную.
В подъемное устройство (рис. 88) входят механизмы подъема, сдвига и перекоса пути, а также балластерные рамы.
Механизм подъема пути состоит из электродвигателя S, редуктора 7 и винта 9, на котором шарнирно укреплена траверса 10 с параллелограммными тягами 6, в свою очередь шарнирно соединенными с поперечной балкой 1. На последней шарнирно подвешены две траверсы 17 \ на каждой траверсе шарнирно подвешены по два электромагнита 16. Путь захватывается электромагнитами и при помощи электродвигателя, редуктора и винта поднимается на необходимую величину.
Шарнирное соединение перечисленных элементов обеспечивает возможность не только подъемки, сдвига и перекоса рельсо-шпальной решетки, но и возможность свободного изменения положения магнитов в зависимости от положения рельсовых нитей при подъемке и сдвижке пути.


Рис. 89. Схема работы механизмов подъема сдвига и перекоса пути ЭЛБ-1: а —положение до подъемки; б —подъемка пути; в —сдвиг пути; г — подъемка рельсовых нитей на разную высоту; механизмы: 1 —- подъема пути; 2 — сдвига пути; 3 — перекоса -пути
Катушки электромагнитов питаются постоянным током напряжением 220 в. Между первой и второй, четвертой и пятой катушками в каждом корпусе магнита размещены ролики 15, обеспечивающие постоянный (1—2 мм) зазор между головкой рельса и полюсными надставками, что уменьшает силы сопротивления перемещению электромагнитов вдоль рельсов и предупреждает стирание полюсных надставок. Конструкция крепления роликов предусматривает ^регулировку величины зазора по мере их износа.
На внешних концах электромагнитов имеются подпружиненные дубовые колодки-щетки, служащие для тщательной очистки головой рельсов. На некоторых машинах с этой целью применена обдувка рельсов сжатым воздухом.
Механизм сдвига пути состоит из электродвигателя 3 (см. рис. 88), редуктора 2, винта и каретки 14, охватывающей параллелограммные тяги 6. При перемещении каретки поперек фермы тяги наклоняются в ту или иную сторону, что вызывает смещение электромагнитов вместе с рельсо-шпальной решеткой.
Механизм перекоса состоит из электродвигателя 4, редуктора 5, винта 13 и рычага 11, жестко соединенного с траверсой 10. В рычаге 11 имеется продольная прорезь, в которой помещен ползун 12, надетый на винте 13. При вращении винта 13 ползун наклоняет рычаг 11, вместе с которым поворачивается на некоторый угол траверса 10, в результате чего одна пара параллелограммных тяг, подвешенных к одному концу траверсы, поднимается, а другая опускается, что приводит к перекосу поперечной балки 1 и рельсо-шпальной решетки.
Схема работы механизмов подъема, сдвига и перекоса изображена на рис. 89.
Балласт под шпалами выравнивается тремя струнками 12 (рис. 90), прикрепленными к балластерным рамам 7, которые в начале работ опускаются настолько, чтобы струнки были ниже подошвы шпал на 100 мм. Струнки прикреплены штырями 11, которые поднимаются и опускаются при повороте рукояток, находящихся в винтовых прорезях цилиндров 10. Струнки представляют собой стальные прутки диаметром 12—16 мм, имеющие петли по концам, в которые входят штыри 11. Балластерные рамы 7 перемещаются по направляющим 6 электродвигателем 1 при помощи редуктора 4 и винта 5. Электродвигатель с редуктором соединены валом 2 и муфтой 3. В месте соединения винта 5 с балластерной рамой 7 установлена ограничительная пружина 9. Если при погружении балластерной рамы в балласт давление винта достигает максимально допустимой величины — 1,6 Т, сжатие пружины достигает величины 25 мм, что приводит к срабатыванию конечного выключателя 8, прерывающего цепь питания электродвигателя 1. Это предотвращает поломку механизма подъема балластерной рамы.
Управление механизмами подъема, перекоса и сдвига балластерных рам осуществляется с поста 6 (см. рис. 86).
Для сметания балласта со шпал с обеих сторон подъемного устройства имеются шпальные щетки (см. рис. 86), изготовляемые из стальных тросов. Щетки поднимают и опускают вручную при помощи винта с рукояткой. Электродвигатели и электромагниты балластера питаются от электростанции 12, размещенной в будке на ферме № 1.
Электростанция состоит из дизеля тракторного типа КДМ-46, вал которого посредством муфты соединен с валом трехфазного генератора типа СГ-65 мощностью 65 кВА и напряжением 220.380 в. Здесь же установлены электродвигатель типа МКМБ (2) мощностью 19 кВт, соединенный с генератором типа ПМ-145 (3) мощностью 16,2 кВА, вырабатывающим постоянный ток напряжением 230 в для питания электромагнитов. На распределительном щите размещены аппаратура, электроизмерительные приборы и понижающие трансформаторы. Напряжение (133, 50 и 12 в), снимаемое с трансформаторов, подводится к цепям управления, сигнализации и к осветительным приборам.
Управление отдельными агрегатами электробалластеров автоматизировано. Приборы автоматически регулируют подачу горючего в дизель в соответствии со снимаемой мощностью; поддерживают напряжение на клеммах генератора независимо от нагрузки. Электродвигатели всех исполнительных механизмов подключены по тельферной схеме, они находятся под током и работают только пока нажата кнопка, включающая их в работу. Кроме этого, в электрическую цепь каждого электродвигателя исполнительных механизмов, как правило, включено по два конечных выключателя, прерывающих цепь, как только исполнительный орган занимает свое предельное положение. Так, например, в электрическую цепь механизма сдвига включены два конечных выключателя, каждый из которых срабатывает тогда, когда каретка 14 (см. рис. 83) приближается к соответствующей панели фермы машины.
Полная автоматизация управления работой электробалластера еще не закончена. Установленные на некоторых электробалластерах электрические и маятниковые уровни окончательно еще не отлажены.
Электрический уровень (рис. 91) состоит из Ш-образной стеклянной трубки, в которую вставлены три контакта 1, 2 и 3, соединенные с пусковыми приборами электродвигателя механизма перекоса. Средний контакт 2 постоянно утоплен в ртуть, а крайние отрегулированы так, чтобы в исходном положении, когда трубка горизонтальна, зазор между ними и ртутью составлял 1—2 мм. Уровень монтируют на поперечной балке электромагнитной подвески. При перекосе пути ртуть замыкает один из крайних контактов, включается двигатель механизма перекоса и, когда уровень занимает исходное положение, контакт размыкается и двигатель останавливается. На кривых, где наружная нить должна быть выше внутренней, электроуровень автоматически отключается от электрической цепи двигателя механизма перекоса.

Рис. 91. Схема электроуровня
На некоторых машинах установлены маятниковые уровни, показания которых передаются дистанционно при помощи сельсинной пары: сельсина-датчика и сельсина-приемника. Схема работы маятникового уровня изображена на рис. 92. При наклоне поперечной балки электромагнитов, на которой укреплен маятник 1, сельсин-датчик занимает относительно маятника положение, указанное штриховой линией. При наклоне поперечной балки вал сельсина-датчика, находящегося в зацеплении с маятником, поворачивается на угол, пропорциональный углу а (см. рис. 92). Поворот вала сельсина-датчика вызывает точно такой же поворот вала сельсина-приемника, установленного в будке управления; стрелка 3, показывающая по шкале величину этого угла, выраженную в миллиметрах подъема одной рельсовой нити относительно другой.
Маятниковые уровни предусмотрено устанавливать в двух местах: на поперечной балке электромагнитной подвески и на первой ходовой тележке машины. Первый показывает положение пути по уровню поднятой рельсо-шпальной решетки, второй — положение участка пути, на котором расположена задняя по ходу ходовая тележка. Механик балластера, учитывая показания обоих приборов, вводит при помощи механизма перекоса соответствующие коррективы в положение по уровню поднятой рельсо-шпальной решетки.
Для автоматизации управления механизмами подъема и сдвига пути требуются дополнительные устройства, базой которых не могут служить фермы машины, так как они деформируются в процессе работы. Для управления механизмом сдвига на переходных кривых целесообразно применять струнный стрелограф. При отсутствии струнного стрелографа механик управляет механизмом сдвига, визуально наблюдая за положением рельсо-шпальной решетки. Так как этот способ неточен, то во время подъемки пути на переходных кривых положение их в плане ухудшается, что вызывает дополнительную затрату труда на рихтовку пути вручную. Перемещать же подъемное устройство поперек фермы приходится в связи с тем, что ось устройства на переходных кривых не совпадает с осью пути.

Рис. 92. Принципиальная схема маятникового уровня:
1 — маятник; 2 — шестерня сельсина-датчика СД; 3 — указатель сельсина-приемника СП
Величина сдвига оси пути на переходных кривых может быть определена по формуле
![]()
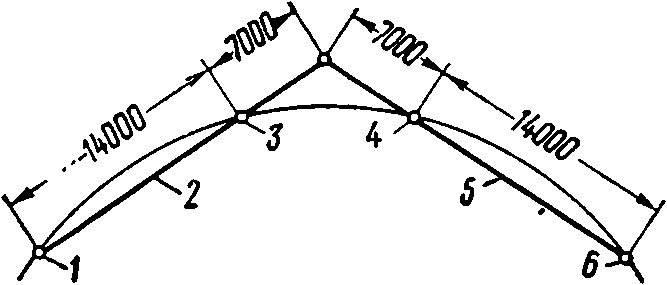
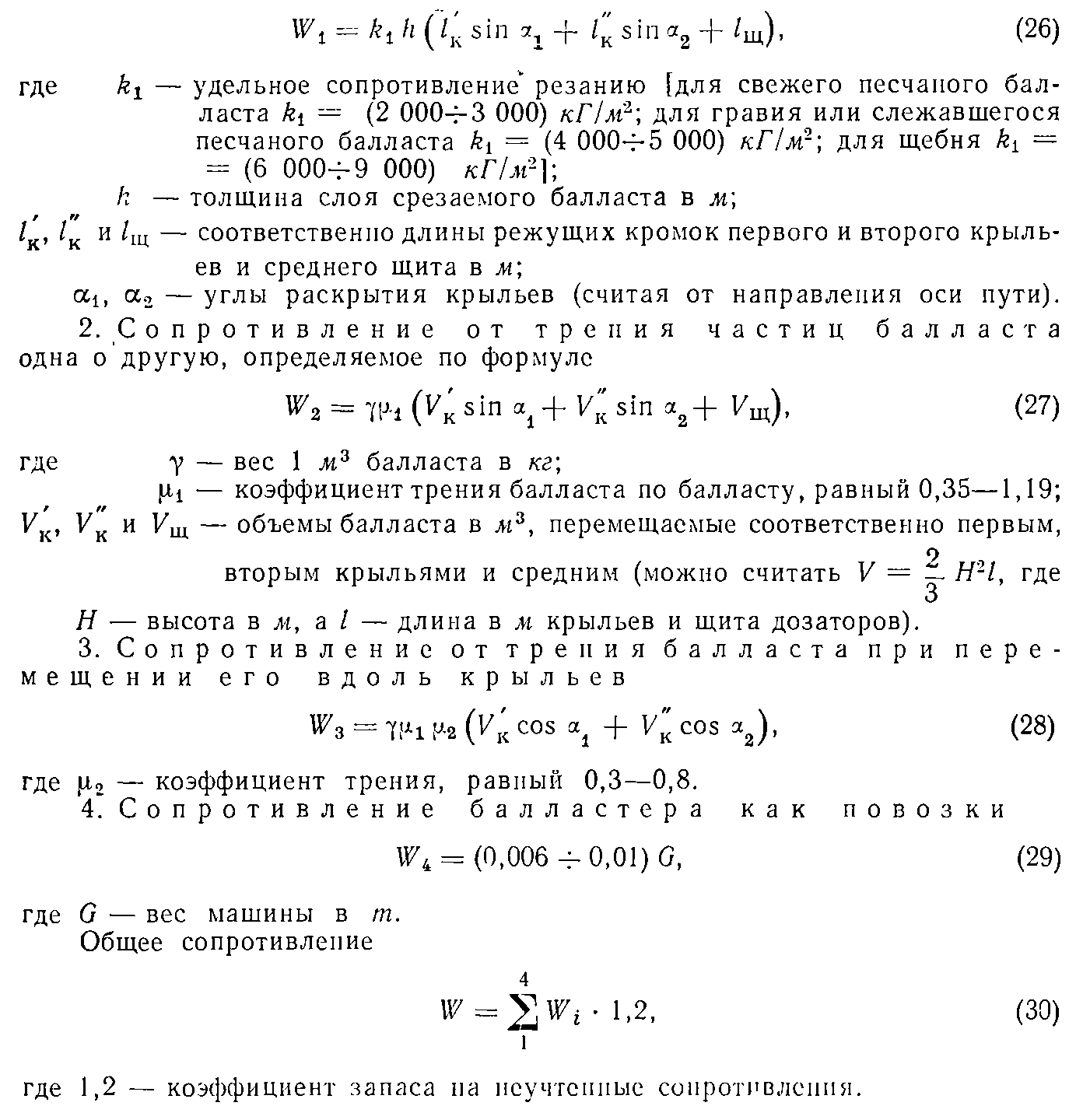
Рис. 93. Схема расположения электробалластера на круговой кривой: 1 —тележка № 1; 2 —ферма № 1; 3 — подъемное устройство; 4 — тележка № 2; 5 —ферма № 2; 6— тележка № 3

Рис. 94. Схема электробалластера ЭЛБ-3
В дозаторном устройстве ЭЛБ-3 (рис. 95) изменен механизм наклона крыла и установлен дополнительный механизм для поворота крыла во время дозировки балласта.
Механизм наклона крыла балластера ЭЛБ-3 состоит из тяги 1, электродвигателя 2, редуктора и телескопических винтов 3.
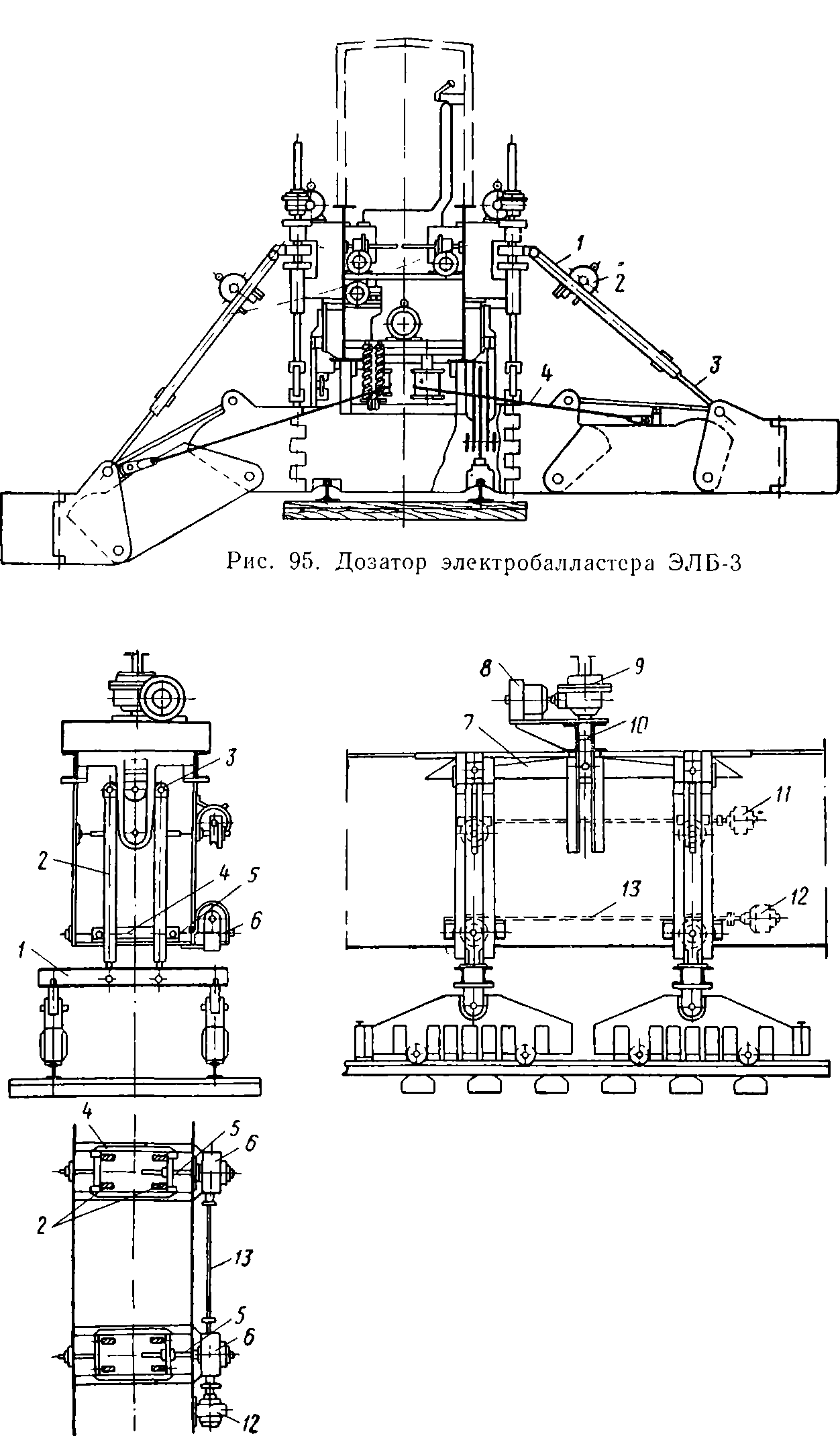
Рис. 96. Подъемное устройство электробалластера ЭЛБ-3
В дополнительном механизме для поворота крыла во время дозировки в балластере ЭЛБ-3 применены гидравлические цилиндры и блочно-тросовая система 4, а в ЭЛБ-ЗМ — механический привод. Указанный механизм улучшает маневренность управления крыльями, что позволяет создавать перед щитом дозатора запас щебня для обеспечения хорошего качества дозировки.
Шит дозатора в ЭЛБ-3 может быть поднят на 250 мм и опущен на 140 мм ниже уровня головок рельсов. Подкрылок может быть поднят на 500 мм и опущен на 950 мм ниже этого же уровня.
Подъемный механизм в ЭЛБ-3 (рис. 96) так же, как и в ЭЛБ-1, имеет один электродвигатель 8, редуктор 9 и винт 10, но подвеска электромагнитов у этих балластеров различная. В ЭЛБ-3 нет продольных траверс, как в ЭЛБ-1, и электромагниты подвешены на двух поперечных балках 1, каждая из которых при помощи параллелограммных тяг 2 подвешена на Т-образных рычагах <?, которые шарнирно укреплены на коромысле 7, подвешенном на винте 10.
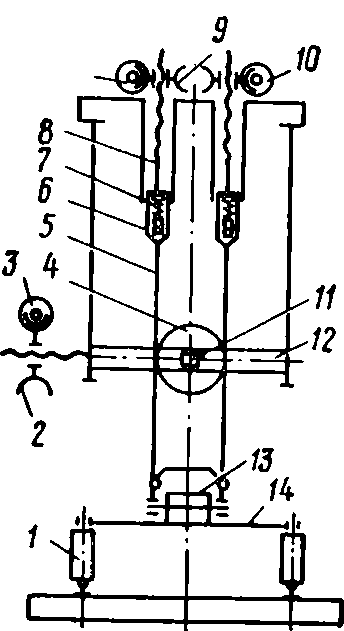
Рис. 97. Схема подъемного устройства электробалластера ЭЛБ-ЗМ
Кинематическая схема работы механизма сдвига в ЭЛБ-3 осталась такой же, как в ЭЛБ-1. Но, поскольку электромагниты в ЭЛБ-3 подвешены попарно на двух поперечных балках, висящих на двух системах параллелограммных тяг 2, то ЭЛБ-3 оборудован двумя механизмами сдвига с двумя каретками 4. Каждая каретка приводится в движение винтом 5, вращаемым редуктором 6. Оба;редуктора соединены между собой карданным валом 13 и приводятся в движение одним электродвигателем 12.
ЭЛБ-3 оборудован двумя механизмами перекоса, приводимыми в движение от одного электродвигателя И. Каждый из механизмов предназначен для изменения расположения по высоте одной пары электромагнитов.
Механизм подъема ЭЛБ-ЗМ отличается от механизма подъема ЭЛБ-1 и ЭЛБ-3. В машине ЭЛБ-ЗМ (рис. 97) электромагниты 1 так же, как в ЭЛБ-3, подвешены к поперечным балкам 14, соединенным между собой продольной балкой 13, подвешенной к двум парам вертикальных тяг 5, каждая из которых перемещается по вертикали отдельным механизмом подъема, состоящим из электродвигателя 10, редуктора 9 и винта 8. При одновременном включении обоих двигателей 10 электромагниты перемещаются по вертикали на одинаковую высоту. Если же нужно создать перекос, то включают только один электродвигатель. Тяги 5 с винтами 8 соединяются посредством вилок 6 и ограничительных пружин 7. Сдвиг пути в ЭЛБ-ЗМ осуществляется путем наклона тяг, на которых висят балки с электромагнитами. В отличие от других машин в ЭЛБ-ЗМ отклонение тяг осуществляется одним роликом 4, расположенным на оси 11, которая перемещается поперек фермы машины двумя винтами 12, редуктором 2. Оба редуктора соединены между собой карданным валом и приводятся в движение одним электродвигателем 3.
Техническая характеристика электробалластеров приведена ниже.

За рубежом на железных дорогах балластировочных машин, подобных машинам, выпускаемым в Советском Союзе, нет. Там применяют плуги различной конструкции, прицепляемые к вагонам, локомотивам или путевым машинам. Подъемку пути осуществляют в основном моторными домкратами циклического действия, имеющими низкую производительность. Для непрерывной подъемки пути в некоторых странах (США, Швейцария, Англия и др.) применяют салазки (рис. 98), которые, действуя по принципу клина, приподнимают рельсо-шпальную решетку. Для уменьшения тягового усилия салазки оборудуют двумя парами полозьев или металлическими ленточными транспортерами. Одна пара полозьев или транспортных лент служит для перемещения салазок по балласту, другая пара — для перемещения шпал по салазкам. Заводятся салазки под рельсо-шпальную решетку при помощи бульдозера, для чего решетку предварительно вывешивают домкратами.
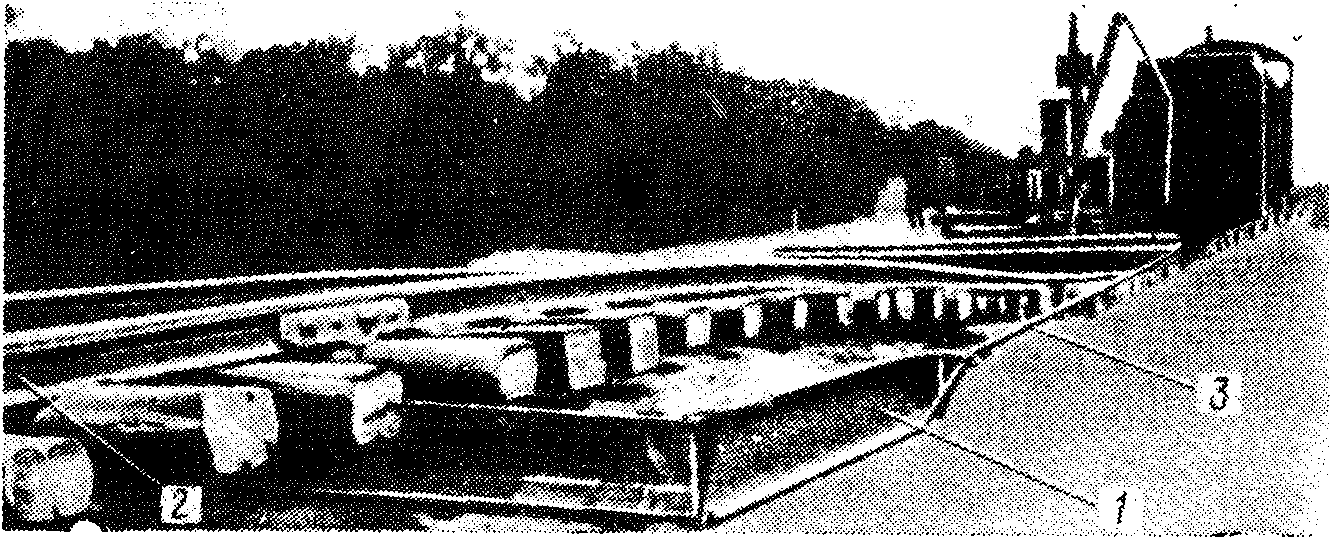
Рис. 98. Подъемка пути балластными салазками; 1 — салазки; 2 — поднятый путь; 3 — трос
Тяговые расчеты при работе электробалластера
При дозировке пути электробалластсром возникают значительные силы сопротивления движению, складывающиеся из четырех величин, определенных ниже.
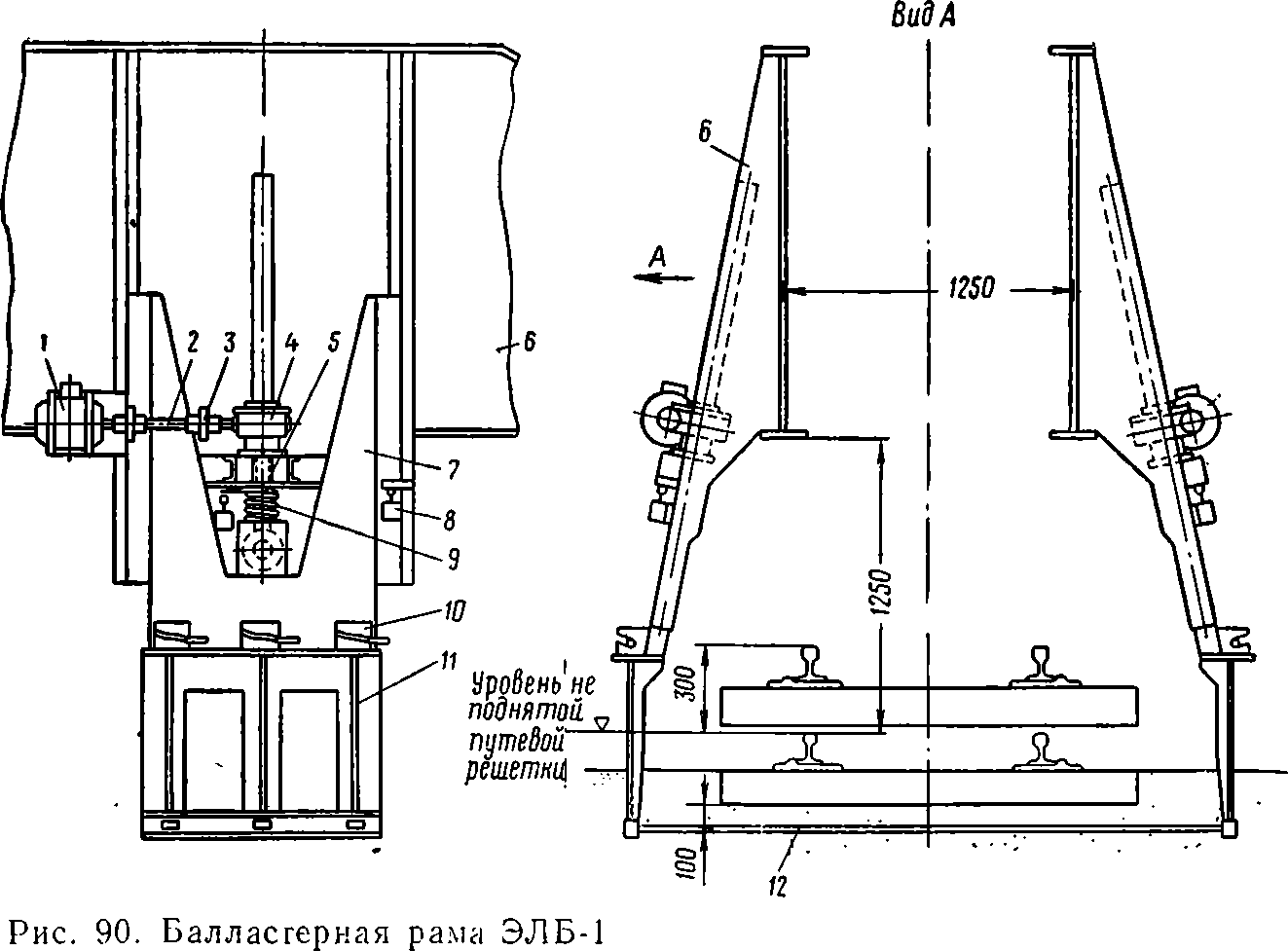
1. С о п р о т и в л е н и е резанию может быть определено в кг по формуле