§ 19-8. Автоматический контроль и регулирование движения ГМПТ
Автоматическими называют системы диспетчерского контроля и регулирования движения ГМПТ с полной автоматизацией процессов получения, передачи и обработки информации о движении (включая принятие решений по его регулированию) с сохранением за диспетчером функций контроля за работой систем автоматики и решения незапрограммированных задач регулирования движения.
Задачи и принципы полной автоматизации контроля и регулирования движения МПТ.
В настоящее время применяют две системы организации городских пассажирских перевозок, каждой из которых соответствует своя группа задач автоматизации контроля и управления движением (см. § 19.1):
- Маршрутную с жестким расписанием по часам и периодам суток. Эта система является общепринятой для МПТ. Она не рассчитана на анализ фактических запросов на пассажироперевозки, так как базируется на плане движения, исходящем из прогнозных расчетов или натурных обследований прошлых пассажироперевозок в аналогичные периоды времени. Задача контроля и регулирования движения при этой системе — обеспечение движения по расписанию вопреки мешающим влияниям, приведение в каждый момент времени фактического движения к плановому, заданному расписанием.
- Систему организации движения, рассчитанную на удовлетворение фактической потребности (запросов) на пассажироперевозки, работу транспорта по запросам, а не по расписанию, с произвольным выбором маршрутов по желанию пассажира и преимущественно безостановочным движением между пунктами отправления и назначения (системы типа заказа поездки и кибер-такси — PRT). Задача контроля и регулирования движения в этом случае — непрерывный или дискретный анализ запросов на пассажироперевозки и решение задачи оптимизации движения по использованию подвижного состава и минимуму затрат транспортного времени пассажиров с учетом фактической загрузки транспортной сети. Круг задач, решаемых автоматикой при организации пассажироперевозок по запросам и жесткому расписанию требует разной оперативности.
Объектами автоматизации при всех системах автоматического контроля и регулирования движения ГМПТ являются поезда (автоматическое регулирование режима движения и контроль движения поездов), дорожные устройства (стрелочные переводы, дорожные сигналы) и станции пассажирообмена (автоматизация процессов обработки запросов на пассажироперевозки, принятия поездов на станционные пути и отправления их после пассажирообмена). Все логические операции контроля и регулирования движения решаются ЭВМ по определенной заложенной в них программе в соответствии с заданным графиком (расписанием) движения (в системах маршрутного ГПТ) или запросами на пассажироперевозки (в системах немаршрутного ГПТ).
В зависимости от объема перерабатываемых данных, определяемого разветвленностью транспортной сети, плотностью движения и принятым принципом организации движения (маршрутный или немаршрутный), применяют три системы автоматизации (рис. 19.18):
- централизованную систему автоматизации (рис. 19.18, а), при которой управление всеми процессами контроля и регулирования движения возлагается на ЭВМ контроля и управления, связанную со всеми поездами П, станциями пассажирообмена СТ, путевой автоматикой ПА, депо Д и т. д. Централизованные системы автоматического контроля и регулирования движения используют в сравнительно простых транспортных системах при относительно небольших объемах перерабатываемой информации. После превышения объемом информации некоторого предела централизованные системы становятся чувствительными к помехам и вследствие этого ненадежными. Кроме того, они трудно приспосабливаются для перспективного развития транспортной системы, так как увеличение количества подвижного состава непосредственно отражается на требующемся объеме памяти ЭВМ;
- децентрализованную систему автоматизации (рис. 19.18,б), при которой движение в каждом транспортном районе Тр управляется своей ЭВМ (ЭВМ Тр) по принципу централизованного управления. Районные ЭВМ связаны лишь выходными параметрами, обеспечивающими согласованность движения по всей сети. В остальном они самостоятельны и равноценны. В связи с меньшим количеством перерабатываемой каждой из районных ЭВМ информации децентрализованная система менее чувствительна к помехам и допускает перспективное развитие присоединением новых районных ЭВМ. Основной недостаток децентрализованной системы состоит в недостаточной общей увязке сети;

Рис. 19.18
Системы автоматического контроля и регулирования движения ГМПТ
3) иерархическую (смешанную) систему автоматизации, которая характеризуется разделением общего потока информации от автоматических устройств объектов контроля и регулирования АОКР на несколько ступеней, связанных только небольшим количеством выходных параметров, например три, как показано на рис. 19.18,в. Здесь ЭВМ сетевого контроля и управления ЭВМ СКУ осуществляет решение задач контроля и регулирования движения на высшем уровне (выполняет функции СЦД по рис. 19.7); ЭВМ контроля и управления автоматикой объектов управления — поездов (ЭВМП), станций (ЭВМ СТ) и путевых устройств (ЭВМ ПА) — составляют второй уровень регулирования и, наконец, автоматика отдельных объектов контроля и регулирования АОКР решает задачи управления отдельными поездами, стрелками и другими объектами. Такое разделение уменьшает дс минимума поток информации между ступенями и повышает надежность всей системы. Поэтому иерархическая система объединяет в себе достоинства централизованной и децентрализованной систем, причем в значительной степени лишена их недостатков. Эффективность ее зависит от правильного деления исходной системы на ступени.
Системы автоматического контроля и регулирования движения в маршрутных транспортных системах с жестким расписанием.
Примерами маршрутных транспортных систем с жестким расписанием являются метрополитенные, трамвайные, троллейбусные, автобусные, системы городских скоростных электрических железных дорог и др. В настоящее время идут по пути автоматизации движения прежде всего тех видов маршрутного ГМПТ, которые работают на изолированном полотне, исключающем появление на нем посторонних людей, т. е. метрополитенов и электрических железных дорог, так как в этом случае на поездах можно не ставить сложных локаторных систем для «прощупывания» впереди лежащих участков пути с целью выявления отсутствия на нем посторонних предметов, тем более, что обеспечить достаточный радиус их действия, согласованный с величиной тормозного пути, в обычной транспортной обстановке невозможно. Однако имеются попытки автоматизации движения и наземных видов ГМПТ (скоростного трамвая и автобуса), но только в случаях, когда они работают на изолированном полотне.
Системы поездной и путевой автоматики, обеспечивающие автоматическое вождение поездов на линии, называют автомашинистом. По характеру поездной автоматики различают два класса систем автомашиниста: программные и логические.
Программные системы автомашиниста обеспечивают режим движения поездов в соответствии с заданной программой независимо от случайных возмущений, появляющихся при работе поездов на линии. Они наиболее просты, но менее точно выдерживают график движения и другие показатели тяги по сравнению с логическими.
Логические системы автомашиниста основаны на принципе непрерывного решения уравнения движения поезда на ЭВМ с учетом всех внешних возмущений, влияющих на процесс движения. Они сложны, но зато обеспечивают более высокую точность графика движения и получение наиболее оптимальных экономических показателей тяги.
Принципиальная схема программной системы автомашиниста (рис. 19.19,а) складывается из программного устройства ПУ на центральном диспетчерском пункте ЦДП, задающего режимы движения поездов, устройств станционной автоматики СА на станциях пассажирообмена С, путевой автоматики ПА, на межстанционных перегонах и поездной автоматики на поездах П.
Рельсовую цепь перегонов между станциями С разделяют на электрически изолированные участки 1, 2, 3 и 4 и питают переменным током с определенным кодом, задающим скорость движения поезда П. Эта информация воспринимается и перерабатывается приемными устройствами головного вагона поезда. Приемник поезда ПрП (рис. 19.19,б) принимает сигналы рельсовой цепи и через усилитель УС1 передает в дешифратор ДШ для расшифровки. В логическом устройстве БС (блоке сравнения) расшифрованный сигнал рельсовой цепи сравнивается со скоростью поезда, поступающей в виде соответствующего сигнала в БС от тахогенератора ТГ, установленного на оси колесной пары, через усилитель УС2.
В зависимости от соотношения сигналов ПрП и ТГ блок сравнения БС вырабатывает команды на увеличение или снижение скорости движения, которые поступают в исполнительный механизм ИМ. Последний представляет собой группу реле, управляющую режимами тяги и торможения, а также открыванием и закрыванием дверей поезда.

Рис. 19.19
Принципиальная схема межстанционного перегона с устройствами автоматики (а) и функциональная схема автоматического управления поездом с автомашинистом программной системы (б)
На станции С после получения соответствующего сигнала автоматически закрываются двери, производится отпуск тормозов и разгон поезда до заданной скорости. При подходе к следующей станции поезд попадает на участок рельсовой цепи, получающей из программного устройства ПУ команду на снижение скорости. При этом включается реостатное или другое торможение и скорость поезда снижается до 8—10 км/ч. На этой скорости поезд проходит следующий рельсовый стык на станционных путях и получает следующую команду, вызывающую срабатывание механических тормозов и остановку поезда.
Схема автомашиниста, построенная по принципу логических систем (рис. 19.20), более сложная. Ее центральный узел — блок арифметического устройства БАУ, выполняющий тяговые расчеты. Работу этого блока обеспечивают датчики скорости ν, пути S и времени t, импульсы которых преобразуются в двоичные числа и поступают в виде исходной информации (текущих значений пути, скорости и времени) в БАУ. Датчики ν и S монтируют на буксах первой по ходу поезда колесной пары. Путевой датчик ПД, установленный непосредственно на пути, предназначен для фиксации начала участка торможения. Он же производит сброс ошибки, накопленной датчиком пути S за предыдущее время движения поезда.
Блок постоянной программы БПП служит для хранения и выдачи данных о профиле пути, времени хода и стоянок, максимальной допустимой скорости и ограничениях ее по пути, соответствующих оптимальному режиму движения поезда. Блок поездных характеристик БПХ сохраняет и выдает данные о тяговых и тормозных характеристиках, а также характеристиках сопротивления движению поезда.
Оперативный блок ОБ передает команды арифметического блока БАУ цепям управления ЦУ тяговыми двигателями и тормозными устройствами. В нем заложены также схемы и команды служебной и аварийной сигнализации.
Отправление поезда со станции производится при нажатии машинистом кнопки «Пуск» на пульте управления. Все остальные операции управления выполняются автоматически. ЭВМ БАУ в процессе движения поезда непрерывно решает задачу тягового расчета фактического движения и сравнивает его результаты с оптимальным графиком движения, заложенным в память машины. По результатам сравнения фактической и заложенной оптимальной кривых движения оперативный блок ОБ выдает оптимизирующие команды на исполнительные органы поезда.
Системы автомашиниста, конечно, значительно сложнее обычных неавтоматических систем управления движением, но их внедрение позволяет снять целый ряд ограничений движения, связанных с ограниченными психофизическими возможностями человека (машиниста) в отношении быстроты реакции на изменения транспортной обстановки, утомляемостью и т. д. В результате появляется возможность значительно повысить плотность движения и провозную способность линий МПТ, оптимизировать движение по времени (графику), расходу электрической энергии на движение и другим показателям.
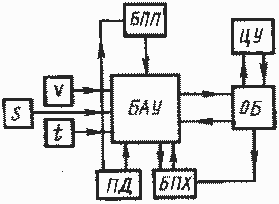
Рис. 19.20
Однако внедрение систем автомашиниста еще не полностью оптимизирует транспортную систему, поскольку общее наблюдение за движением поездов и его координация остается за диспетчером. Если мешающие факторы, сбивающие график движения, не исключены, то диспетчеру приходится регулировать движение, управляя соответствующей автоматикой. Из-за ограниченной скорости реакции на изменение транспортной ситуации, большого объема перерабатываемой информации и естественной утомляемости диспетчера фактическое движение получается при этом далеко не оптимальным. В связи с этим максимальный эффект дает полная автоматизация контроля и управления движением, когда на долю диспетчера остается только наблюдение за работой систем автоматики и решение задач управления, на которые автоматика не рассчитана.
Система автоматики при полной автоматизации контроля и управления движением поездов расчленяется на ряд блоков (рис. 19.21): блок ЭВМ сетевого управления ЭВМ СУ с ЭВМ безопасности ЭВМ Б центрального диспетчерского пункта ЦДП, формирующий командную информацию для поездов; блок путевой автоматики ЭВМ ПА, управления автоматикой ПА стрелочных переводов; блоки систем управления ЭВМ СА станционной автоматикой СА станция пассажирообмена С; аппаратуру централизации стрелок и сигналов ПС, аппаратуру автомашиниста поездов 77. Все эти блоки связаны кабелями связи, телефона и телепередачи.
Основными узлами автоматики ЦДП являются ЭВМ СУ и ЭВМ Б. В программе этих ЭВМ заложена постоянная информация о трассе маршрутов (уклоны, кривые, допустимые скорости на участках по условиям движения) и, кроме того, в них вводится переменная информация о положении сигналов, стрелок, временных ограничениях скорости (например, в связи с путевыми ремонтными работами), положении поездов на линии и т. д. ЭВМ непрерывно рассчитывает оптимальный режим движения поездов и передает эту информацию на поезда, где она выступает в роли исходной информации для систем автомашиниста.
В целях безопасности на диспетчерском пункте ставят две ЭВМ СУ, которые работают параллельно. Результаты расчетов на выходе их сравниваются между собой и пропускаются в передающее устройство только в случае их совпадения. ЭВМ СУ обеспечивает отправление поездов со станций по расписанию и оптимизирует соблюдение графика движения. Она сокращает стоянку поездов на станциях при опозданиях и задерживает их при нагонах, на конечных станциях направляет поезд на поворотное кольцо и готовит его к новому рейсу, управляет устройствами освещения поездов, открывает и закрывает двери со стороны посадочной платформы. В памяти этой ЭВМ хранятся графики движения поездов для каждого дня недели. Взаимодействие между ЭВМ Б и ЭВМ СУ осуществляется так, что сигналы ЭВМ СУ проходят на поезда через ЭВМ Б, которая может их пропустить, а может и задержать (блокировать), если они не соответствуют сложившейся транспортной ситуации. Так, например, приказ на закрывание дверей и отправление поезда от ЭВМ СУ проходит на поезд только в случае, если ЭВМ Б установила наличие достаточного расстояния до впереди идущего поезда.
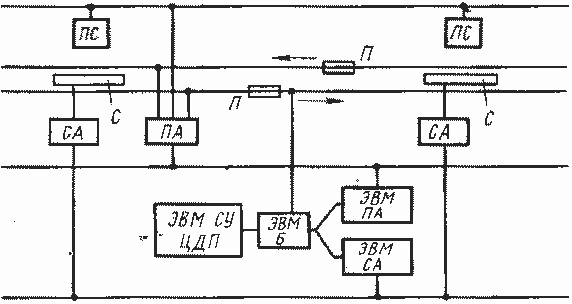
Рис. 19.21
Схема основных связей блоков автоматики автоматических систем диспетчерского контроля и регулирования движения поездов
Для всех АСУД характерен постоянный обмен информацией между ЦДП и всеми поездами. Наилучшим способом связи считают индуктивную бесконтактную высокочастотную систему связи, которая применима для всех типов пути и для всех климатических условий, включая зимние со снежным покровом на путях. Радиосвязь исключается по соображениям недостаточной надежности передачи и приема сигналов. Более надежна проводная связь для передачи высокочастотных сигналов через уложенный в пути антенный провод при небольшом воздушном промежутке до приемника. Область используемых частот 30—70 кГц, а скорость передачи сигналов 600—2400 телегр. сигн/с. Сообщение, передаваемое поезду, содержит адресный код, по которому оно принимается только тем поездом, которому сообщение адресовано; задаваемую скорость движения и расстояние до впереди идущего поезда; команды на экстренное торможение, перехода на служебное торможение, изменения направления движения, перехода на маневровый режим; команды оповещения названия станции, открывания правых или левых дверей, закрывания дверей. В ответных сообщениях с поезда содержится адресный код для обозначения поезда, посылающего сообщение; информация о местонахождении поезда, положений реверсора и т. д.; вызов на телефонную связь. Точность приема сигналов определяет величина разрывов между их частотами в области используемых частот.
Способ передачи информации на движущийся поезд может быть различным. При неизолированных от земли рельсах для передачи сигналов используют одножильный линейный проводник в специальной кабельной изоляции. Вторым проводом в этом случае является земля. Если путь имеет оба изолированных рельса или движение поездов происходит по безрельсовому пути, то укладывают два антенных провода: один по средней линии колеи и другой по колее одного из колес. На поезде устанавливают две приемно-передающих антенны, каждая из которых представляет собой ферритовый сердечник с двумя обмотками.
На подвижном составе, предназначенном для работы в системе автоматического управления, устанавливают аппаратуру для приема и передачи информации; аппаратуру управления тягой и торможением поезда, действующую в соответствии с получаемой информацией; оборудование для измерения пройденного пути и скорости движения поезда; приборы, показывающие переданную для поезда информацию, и телефонное оборудование для переговорной связи через антенный провод между поездом и ЦДП. При полностью автоматической системе управления без машиниста показывающие приборы иметь не обязательно, но при эксплуатации поездов под контролем машиниста они нужны, В настоящее время считают, что применение любых видов автоматического управления повышает безопасность движения поездов и экономическую эффективность тяги, но предпочтение отдают системам, при которых автоматика работает под контролем машиниста. Они оказываются более простыми, имеют более высокий психологический уровень доверия со стороны пассажиров и более экономичны. Ряд таких систем уже работает в эксплуатации на метрополитенах СССР, США, Англии, Японии и других стран, на городских электрических железных дорогах типа BART в США. В дальнейшем они будут развиваться прежде всего в направлении повышения надежности, снижения стоимости и расширения области рационального применения при различных условиях движения.
Принципы автоматического контроля и регулирования движения в транспортных системах типа кибер-такси (PRT).
Технологический процесс организации движения по запросам на пассажироперевозки, характерный для систем кибер-такси, включает в себя:
- Сбор запросов на пассажиропоездки и немедленную передачу их в ЦДП для обработки;
- выдачу поездов в пункты затребования (свободных или не полностью заполненных, следующих в тот же пункт назначения);
- выбор кратчайших маршрутов безостановочного движения поездов между пунктами отправления и назначения с учетом загрузки транспортной сети и исключения столкновений экипажей;
- связь транспортной сети с эксплуатационными депо для затребования новых поездов и возвращения не нужных на линии.
Все эти операции технологического процесса должны быть автоматизированы. Решение проблем автоматизации различных систем кибертакси определяются их построением и комплексом требований, которые к ним предъявляются:
- подвижной состав кибер-такси необходимо предоставлять в распоряжение пассажиров немедленно по требованию или в кратчайший срок;
- экипажи нужно направлять к заданной цели (пунктам назначения) через транспортную сеть по кратчайшему во времени пути;
- система должна оставаться работоспособной при повреждениях сети: выходе из строя узлов автоматики или экипажей и заторах;
- порожний (нулевой) пробег экипажей должен быть минимальным;
- автоматизация должна обеспечивать максимальную безопасность движения.
Для удовлетворения этих требований системы кибер-такси должны иметь:
- специальную изолированную транспортную сеть с магистральными путями и ответвлениями к станциям пассажирообмена (рис. 19.22), обеспечивающими возможность безостановочного движения экипажей по магистральному пути без задержек поездами, совершающими пассажирообмен на остановочных пунктах. Для этого переход поездов на ответвления к остановочным пунктам для пассажирообмена должен происходить на максимальной скорости движения и не требовать снижения скорости движения других экипажей, следующих по магистральному пути;
- единый электропривод и единое автоматическое управление всеми экипажами, включая систему автоматического регулирования интервалов между поездами и скорости их движения, систему непрерывной передачи каждому поезду путевых сигналов о заданной скорости, автоматическое регулирование направления движения на стрелках ответвления и пр.;
- систему устройств, исключающих вмешательство пассажиров в процесс движения: попадание на пути транспортной сети, открывание и закрывание дверей экипажей, высовывание из окон экипажей и т. д. Пассажирский салон в процессе движения должен быть связан с внешним миром только телефонной связью;
- аварийное электроснабжение через дополнительные контактные провода при выходе из строя основной системы электроснабжения.
В связи с большим объемом перерабатываемой информации системы кибер-такси могут иметь только иерархическую систему автоматического управления. Рекомендуют обычно трехступенчатую иерархическую систему управления. Первая ступень 1 регулирования этой системы — ступень перегона (рис. 19.23, а). Ее составляют установленные в каждом экипаже индивидуальные системы измерения расстояния до впереди идущего поезда, которые самостоятельно регулируют зависящее от скорости движения расстояние между поездами. Обычно эту систему рассчитывают на максимальные скорости движения экипажей и соответствующие этим скоростям интервалы между поездами lи. При этом необходимо иметь только избыточный контур регулирования без расчетной системы. Однако с целью повышения плотности движения до максимальной применяют и гибкие системы регулирования интервалов lи в функции скорости движения по расчетному тормозному пути.
Вторую ступень II регулирования составляют: управление на стрелках разветвления с помощью стрелочных единиц разветвления СЕР и на стрелках сплетения с помощью стрелочных единиц сплетения СЕС (рис, 19.23, б), управление на станциях с помощью станционных единиц управления СЕУ и блоков кодирования цели К (рис. 19.23, в), задание скорости движения экипажей с помощью блоков задания скорости ν и подсчет транспортного потока счетчиками Т (рис. 19.23, г).

Рис. 19.2-2
Принципиальная схема трассы транспортных систем кибер-такси (PRT) с магистральными путями (1) и ответвлениями (2) к станциям пассажирообмена ОП
Третью ступень III регулирования представляет ЭВМ сетевого управления ЭВМ СУ, регулирующая работу всех систем автоматики по их выходным параметрам (рис. 19.23, д).
Станции пассажирообмена в системах кибер-такси устраивают на ответвлениях 2 от магистрального пути 1 (рис. 19.24, а). На станциях устанавливают билетные автоматы БА и пункты погашения проездных билетов ПП на проходах к экипажам на посадку (по типу турникетов метрополитенов). Они формируют информацию о запросах на пассажиропоездки и их целях (пунктах назначения). Эта информация поступает в станционную единицу управления СЕУ. На входе и выходе станций устанавливают счетчики транспортного потока Т. По данным этих счетчиков определяют количество экипажей, готовых к обслуживанию пассажиров станции, сравнивают эти данные с запросами на пассажиро- поездки, поступающими от турникетов ПП, и рассчитывают дефицит или избыток наличия экипажей. Результаты этих расчетов СЕУ сообщает ЭВМ сетевого управления ЭВМ СУ, которая, получая эти данные со всех станций, решает задачу оптимальной передислокации экипажей на сети. В случае выхода из строя ЭВМ СУ станционные единицы управления СЕУ обеспечивают независимый от нее обмен экипажами между станциями, но в этом случае он будет менее оптимальным.
Выбор маршрутов следования экипажей на сети между пунктами отправления и назначения производит ЭВМ СУ с учетом загрузки сети по участкам и аварийных перерывов движения на отдельных участках, а также критериев минимума затрат транспортного времени пассажиров и пробега экипажей.
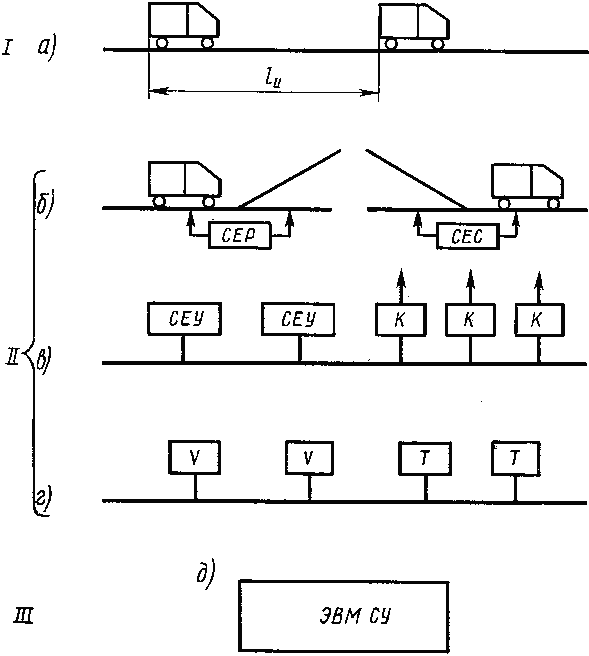
Рис. 19.23
Схема трехступенчатого иерархического управления транспортной системой кибер-такси
Данные о загрузке участков сети экипажами регистрируются счетчиками транспортного потока Т, установленными в начале каждого участка (рис. 19.24, б). Маневром экипажей на сети управляют стрелочные единицы разветвления СЕР в пределах перечня направлений, установленных ЭВМ. Обрабатывая информацию участковых счетчиков транспортного потока, сетевая ЭВМ составляет обзор транспортных потоков по всей сети и выдает задания на регулирование скорости движения, которые Сообщаются экипажам в начале каждого перегона.
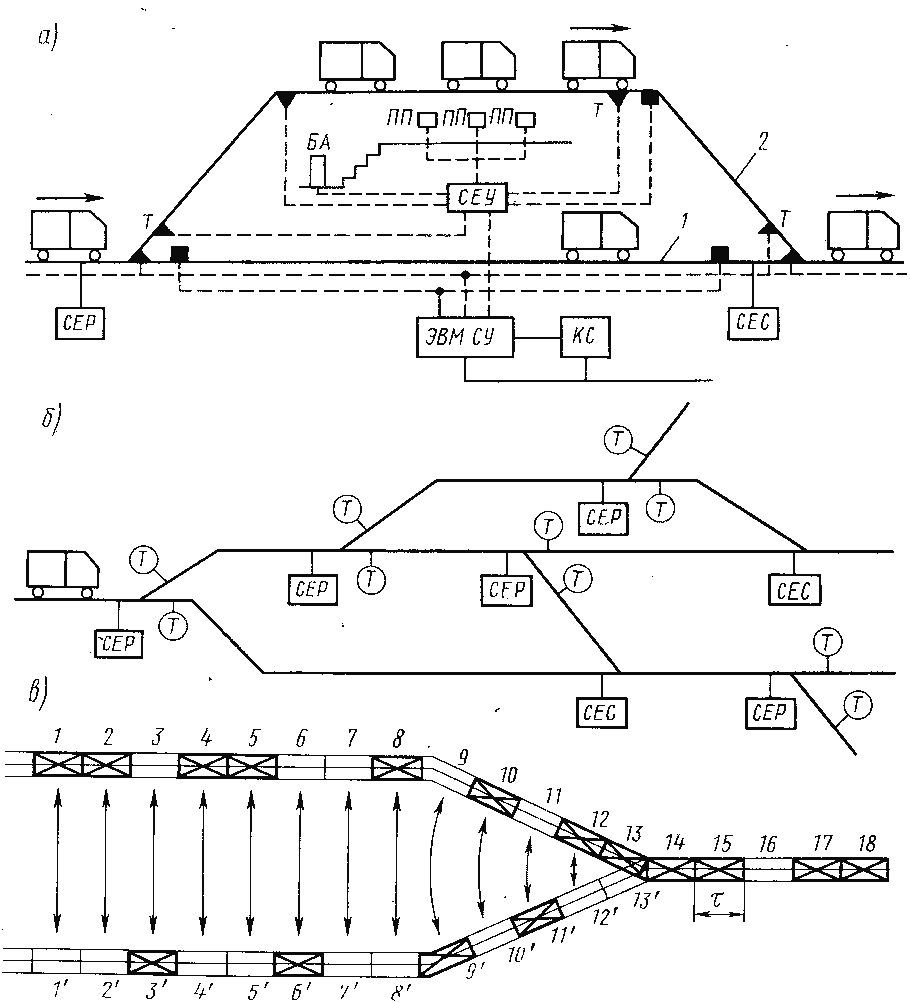
Рис. 19.24
Принципиальная схема автоматики систем кибер-такси на ответвлениях к станциям пассажирообмена и на самой станции (а), установки транспортных счетчиков и стрелочных единиц управления на ответвлениях и сплетениях транспортной сети (б) и организации движения экипажей по принципу «зеркального отражения» (в)
Организация движения экипажей кибер-такси между пунктами отправления и назначения должна быть безостановочной, т. е. такой, чтобы переход экипажей с магистрального пути на ответвления к станциям пассажирообмена и на сливающиеся направления не требовал остановки и снижения скорости движения ни самих этих экипажей, ни экипажей, следующих за ними по магистральному пути. Чтобы реализовать это требование, движение экипажей на сливающихся направлениях организуется системой автоматики по принципу «зеркального движения» (рис. 19.24, в). Он состоит в том, что движение по сети независимо от заполнения ее подвижным составом организуется как движение экипажных ячеек 7—18, расстояния между которыми τ определяются интервалом безопасности. При вступлении на перегон каждый из поездов занимает одну из экипажных ячеек так, чтобы они заполняли перед сплетением только те места, которым соответствуют зеркально свободные на другой ветви. В этом случае экипажи с обеих ветвей переходят на общую линию без остановки и с заданным интервалом.
Полная автоматизация позволяет получить наиболее высокую степень надежности и безопасности движения, оптимальное распределение транспортных потоков, минимальное транспортное время пассажиров и максимальную экономичность транспортной системы, благодаря чему системы кибер-такси при достаточной плотности транспортной сети обеспечивают не меньший и даже более высокий уровень транспортного обслуживания по сравнению с легковым автомобилем. При выходе из строя сетевой ЭВМ системы кибер-такси допускают продолжение эксплуатации, хотя она будет и менее оптимальной. О надежности систем кибер-такси дают представление, в частности, данные расчетов системы кибер-такси г. Моргантауна (США). Расчетное количество отказов этой системы составляет 104 в сутки, т. е. менее одного отказа за 28 лет, а вероятность столкновения экипажей 5·10-5, т. е. менее одного отказа за 275 лет.
Основной недостаток, присущий системам кибер-такси, заключается в низкой провозной способности по причине использования экипажей небольшой вместимости, равной вместимости легкового автомобиля. Повышение вместимости экипажей кибер-такси ограничивается условиями наполнения благодаря тому, что система принципиально рассчитана на индивидуальное использование. Ряд систем кибер-такси рассчитан на двойной режим эксплуатации: свободный выбор маршрутов в межпиковые периоды и маршрутное движение в часы пик по пассажиронапряженным направлениям. В этом случае используют экипажи вместимостью до 20 пассажиров, но достаточно высокое наполнение они имеют только в часы пик.