Канд. техн. наук В. А. ЕЛСУКОВ
ОПЫТ ЭКСПЛУАТАЦИИ КОМПЛЕКСНОЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЕЗДАМИ
Тр. ВНИИЖТ, 1983, вып. 670, с. 29-32.
Приведены результаты эксплуатации комплексной системы автоматического управления поездами (КСАУП), внедренной на Кировско-Выборгской линии Ленинградского метрополитена. Дана количественная оценка работы системы по точности выполнения графика движения и остановки поездов на станциях, регулировочной способности и надежности работы аппаратуры.
В 1976 г. на Кировско-Выборгской линии Ленинградского метрополитена началась постоянная эксплуатация комплексной системы автоматического управления поездами (КСАУП). КСАУП предназначена для повышения ритмичности движения поездов путем программирования и централизации управления с помощью ЭВМ. Она позволяет повысить безопасность движения, увеличить пропускную способность линий метрополитена, оптимизировать режимы ведения по перегонам, сократить время при торможении поездов на станциях и тупиках, увеличить точность выполнения графика движения и сократить численность локомотивной бригады с двух до одного человека.
КСАУП построена по централизованному принципу и содержит устройства центрального поста управления, путёвые и станционные устройства, поездные устройства.
С целью определения эксплуатационных показателей КСАУП, повышения надежности и качества управления поездами ВНИИЖТом, Ленинградским метрополитеном и институтом Гипротранссигналсвязь (ГТСС) проводились испытания системы по методике, разработанной во ВНИИЖТе [1]. По результатам испытаний модернизированы некоторые узлы аппаратуры КСАУП.
Важным показателем качества торможения является точность остановки поездов на станциях, которая характеризуется средним квадратичным отклонением точки остановки поезда от расчетной σ. В начальный период эксплуатации с помощью КСАУП была достигнута точность остановки ±1,5 м с вероятностью 0,92 и σs=0,79 м. В результате улучшения технологии эксплуатации и модернизации поездной аппаратуры повышена вероятность выполнения заданной точности остановки до 0,99.
Алгоритм управления временем хода, реализуемый в системе автоматического управления, определяет точность выполнения графика. Процесс управления движением поездов по перегонам линий метрополитенов включает решение двух задач: выполнение номинального режима движения и регулирование движения в зависимости от случайных возмущений, возникших в результате задержки поезда на станции или перегоне.
Точность выполнения времени хода как по перегону, так и по линии зависит от большого количества различных факторов, которые можно считать независимыми случайными величинами. К таким величинам относятся напряжение на токоприемнике, масса поезда, сопротивление движению и электромеханические характеристики поезда. В связи с этим точность выполнения графика движения определяется математическим ожиданием (МО) и средним квадратичным отклонением (СКО) параметров движения.
Анализ случайных факторов показывает, что для номинального режима движения при эксплуатации на линии подвижного состава одного типа основное влияние на точность движения поездов оказывает изменение массы поезда, а разброс времени движения в режиме выбега в зависимости от вариации массы поезда определяет в основном точность времени движения поезда по перегону.
Испытания номинального режима после модернизации КСАУП проводились Ленинградским метрополитеном и институтом ГТСС. Во время испытаний снимались статистические характеристики режимов движения в часы утреннего и вечернего «пика», а также дневного спада пассажиропотока при ручном и автоматическом управлении поездом. Для каждого перегона линии определяли время тягового режима Тдв, общее время движения по перегону Гх, скорость входа поезда на станцию νвх.
По данным испытаний установлено, что разброс времени движения, равный 3σΤх, при автоведении в 2—3 раза меньше, чем при ручном управлении, а стабильность параметров движения Тдв, Твх, Тх выше, чем при, ручном управлении.
Одним из важнейших показателей выполнения графика движения является обеспечение заданного времени отправления поездов со станций. Исследование этого показателя на Кировско-Выборгской линии проводилось по распечаткам центрального поста управления при ручном и автоматическом управлении.
Исследования дали следующие результаты. Пределы отклонений по отправлению уменьшены примерно в 1,5 раза по сравнению с начальным периодом эксплуатации [1] за счет уточнения режимов движения поездов по перегонам и параметров регулирования времени движения. Пределы отклонений времени отправления поездов со станции при автоматическом управлении в 1,5 раза меньше, а точность (среднее квадратичное отклонение) времени отправления поездов со станций при автоматическом управлении в 2—3 раза выше, чем при ручном управлении, что сокращает возможность сбоев графика на линии метрополитена и создает условия для снижения расхода электроэнергии.
Нагон опозданий поездов в КСАУП осуществляется путем дополнительного поддержания режима тяги с учетом отклонения от графика движения, причем максимальная длительность режима тяги ограничена зоной регулирования, которая для каждого перегона определяется индивидуально. Для осуществления автоматического регулирования общего времени движения поезда для каждого перегона определены коэффициенты регулирования К=Тдв/Тх.
Компенсация возмущений в КСАУП осуществляется также путем регулирования времени стоянки поезда на станции в пределах от минимального до максимального значения в зависимости от отклонений поезда по прибытию. Эти пределы для каждой станции определяются индивидуально и зависят от пассажиропотока на станции.
Регулировочная способность КСАУП [1] исследовалась по распечаткам центрального поста. Изменения времени опоздания (рис. 1, а, б) по перегонам при автоматическом и ручном управлении идентичны, т. е. регулировочная способность КСАУП не хуже, чем при ручном управлении, что говорит о правильности выбора зон и параметров регулирования.
Вместе с тем следует отметить недостатки регулирования КСАУП, а именно ограниченность зоны регулирования общего времени движения по перегону; необходимость снижения максимальной скорости движения при автоведении по отношению к допустимой скорости в связи с учетом различий характеристик подвижного состава и аппаратурной погрешности АРС и автоведения.

Рис. 1. Компенсация опозданий поездов по II пути при автоматическом (а) и ручном (б) управлении
По результатам эксплуатации КСАУП проведена также оценка параметров надежности аппаратуры. В настоящее время техническое обеспечение КСАУП, эксплуатируемой на Кировско-Выборгской линии, включает управляющие вычислительные комплексы (УВК) АСВТМ М-6000, стативы автоведения СА, стативы штепсельных реле автоведения СШРМА, шкафы автоведения ША, блоки генераторов БГ, датчики индуктивные путевые ДВП, путевые программы, комплекты поездной аппаратуры.
За рассматриваемый период не было зафиксировано отказов устройств центрального поста. Это объясняется тем, что устройства центрального поста имеют дублирование по принципу активного резервирования. Зафиксированы отказы вспомогательных устройств, печатающих машинок, станций индикации данных, среднее время безотказной работы которых составляет не более 2500 ч.
Высокие показатели надежности имеют путевые и станционные устройства КСАУП. Поездная аппаратура КСАУП по сравнению с указанными устройствами имеет более низкие показатели надежности.
В процессе исследований определены показатели восстановления и отказов аппаратуры в целом, функциональных частей, блоков и узлов аппаратуры. Интенсивность восстановления и интенсивность отказов определены на основе статистических данных [2]. Интенсивность восстановления поездной аппаратуры КСАУП и среднее время безотказной работы в основном определяются параметрами надежности приемной части устройств автоматического регулирования скорости и приемной части автоведения. Недостаточная надежность приемной части АРС определяется конструкцией привода датчика скорости ДС-1 и несоосностью колесной пары и датчика, а также особенностями соединительного тракта между ДС-1 и блоками локомотивных приемников. Поэтому необходимо модернизировать конструкцию датчика скорости и его привода.
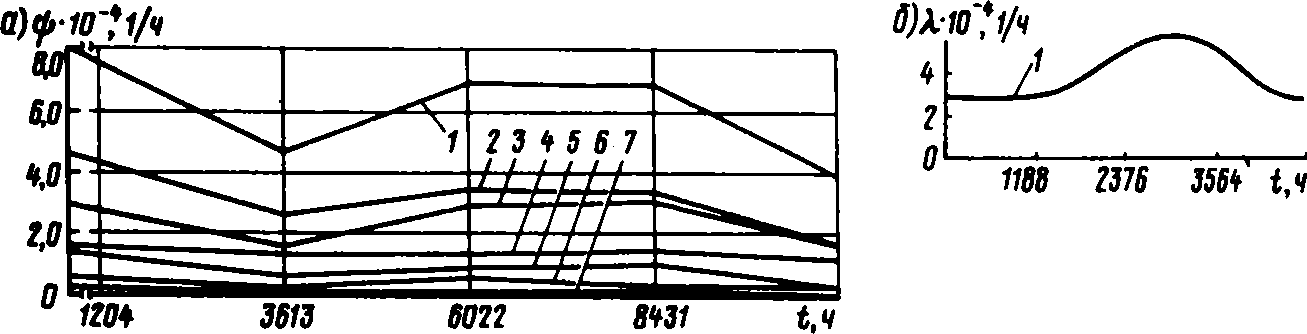
Рис. 2. Кривые интенсивности восстановления (а) и отказов (б) аппаратуры КСАУП: 1 — поездная аппаратура КСАУП; 2 — аппаратура автоведения; 3 — приемная часть АРС; 4 — приемная часть автоведения; 5 — логическая часть аппаратуры; 6 — исполнительная часть аппаратуры; 7 — блок питания
На параметры надежности приемной части автоведения влияет настройка блока фильтров БФ и влага, попадающая во внутреннюю полость корпуса индуктора, причем каждый комплект поездной аппаратуры КСАУП содержит четыре индуктора. В настоящее время показатель интенсивности восстановления устройств приемной части автоведения снижен в связи с улучшением технологии обслуживания устройств.
Показатели интенсивности восстановления на Ленинградском метрополитене используются для совершенствования структуры, эксплуатационного штата по обслуживанию устройств КСАУП, определения эксплуатационного резерва аппаратуры, выработки решений по модернизации устройств и технологического процесса обслуживания, обеспечения своевременного ремонта аппаратуры.
На рис. 2 а, б представлены зависимости интенсивности восстановления ψ и отказов λ поездной аппаратуры КСАУП и ее отдельных блоков от времени работы t. Данные об отказах получены по 35 комплектам поездной аппаратуры КСАУП. Зависимость λ (ί) позволяет определить периодичность ремонта аппаратуры и подготовить технологический процесс ремонта и эксплуатации. Повышение отказов поездной аппаратуры в целом наблюдается через 7—8 мес после установки на подвижной состав, причем на работоспособность поездной аппаратуры в этот период в основном влияют отказы датчиков скорости ДС-1, соединительных трактов между датчиками ДС-1 и блоками локомотивных приемников БЛИМ, индукторов автоведения. Испытания также показали, что логическая и исполнительная части аппаратуры за рассматриваемый период практически отказов не имели.
Результаты испытаний, а также опыт эксплуатации КСАУП подтвердили ее эффективность и работоспособность, а также соответствие предъявляемым к ней требованиям как с точки зрения функционального назначения, так и надежности аппаратуры.
СПИСОК ЛИТЕРАТУРЫ
- Автоматическое управление движением поездов метрополитенов/ В. И. Астрахан, Е. И. Быков, Г. В. Фаминский, В. М. Малинский. М.: 1981., с. 1-34. (Метрополитены. Экспресс-информация/ ЦНИИТЭИ МПС; Вып. 1).
- Дружинин Г. В. Надежность системы автоматики. М.: Энергия, 1967, с. 106- 150.