5-10. ЭЛЕКТРИЧЕСКАЯ СХЕМА ТРАМВАЙНОГО ВАГОНА СЕРИИ КТМ-5М
Вагон управляется при помощи контроллера управления, который имеет нулевое положение, четыре положения хода Л1, X1, Х2, Х3 и пять положений тормоза ΤI, ТII, ΤIII, ТIV и ТР. Электрическая схема вагона (рис. 5-25 и 5-26) позволяет осуществлять следующие режимы:
маневровый режим;
пуск и движение па позиции XI контроллера водителя с минимальным ускорением 0,5—0,6 м/с2, используемым при плохом коэффициенте сцепления колес с рельсами;
пуск и движение па позиции Х2 со средним ускорением 1 м/с2;
пуск и движение на позиции ХЗ с максимальными ускорением 1,3—1,5 м/с2 и скоростью до 60 км/ч;
выбег;
электрическое реостатное торможение на позициях ТI, ТII, ТIII для подтормаживания и спуска вагона на уклонах;
автоматическое реостатное торможение на позиции ТIV до полной остановки вагона с автоматическим наложением соленоидных тормозов при истощении электродинамического тормоза;
экстренное торможение на позиции ТР контроллера водителя, при котором помимо электродинамического тормоза, соответствующего позиции включаются рельсовые тормоза;
аварийное торможение с питанием последовательных обмоток возбуждения тяговых двигателей от аккумуляторной батареи при исчезновении напряжения в сети или сгорании предохранителя в цепи шунтовых обмоток;
замещение электрического торможения соленоидным в случае выхода из строя тормозной схемы;
пуск, движение и торможение при одной отключенной группе двигателей.
На ходовом режиме четыре тяговых двигателя соединены по два последовательно в две группы, а группы — параллельно. Тяговые двигатели выполнены с низколежащей характеристикой, обеспечивающей выход на безреостатную характеристику полного поля при скорости не выше 16 км/ч. Это позволило расход энергии сохранить таким же, как и при последовательно-параллельном переключении, и провести значительное упрощение электрической схемы.
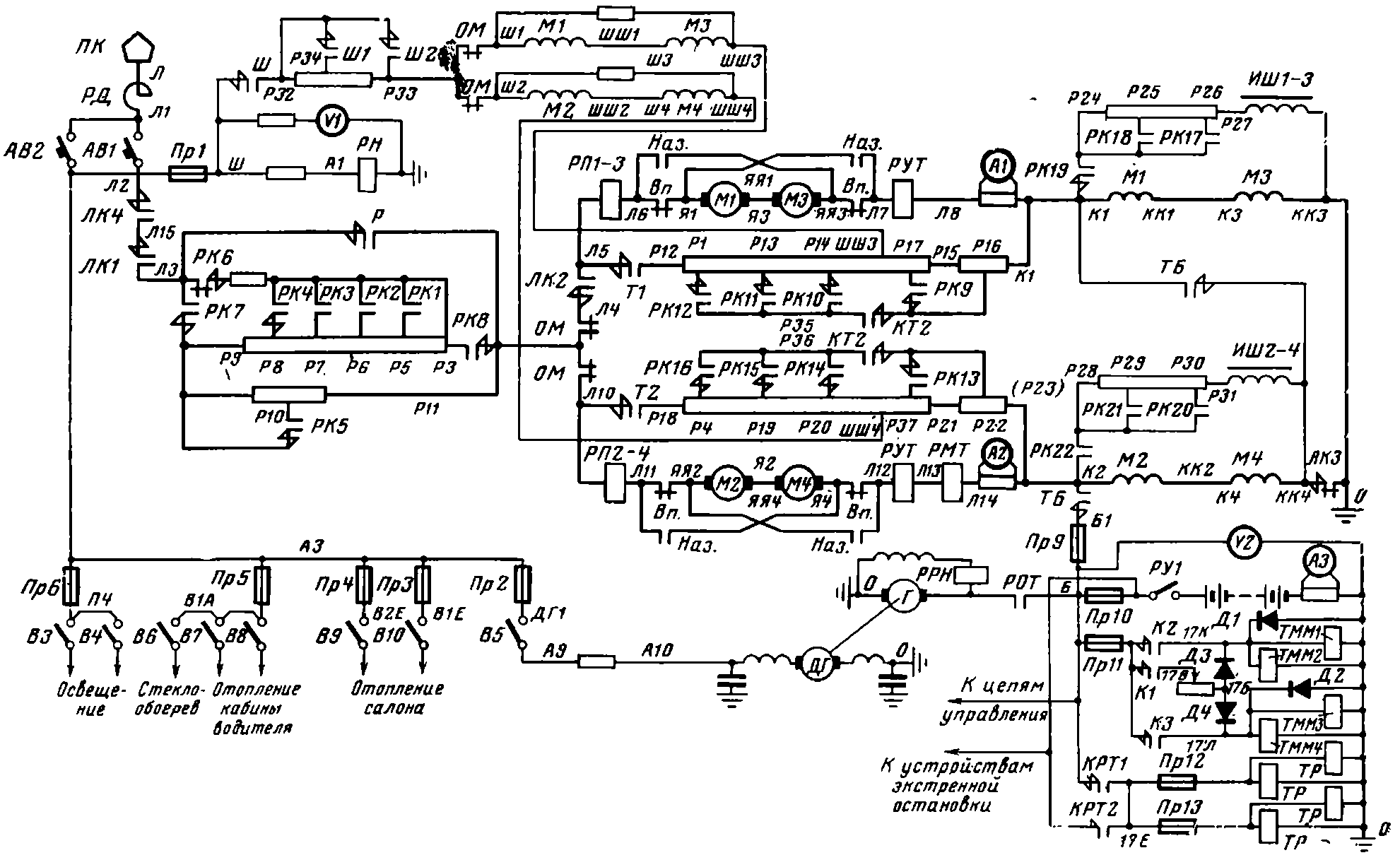
Рис. 5-25. Схема силовой цепи трамвайного вагона серии KTМ-5M.
Пуск вагона осуществляется постепенным выведением пускового сопротивления при совместном действии последовательных и параллельных обмоток возбуждения двигателей. После вывода сопротивлений ноле возбуждения двигателей ослабляется сначала за счет отключения параллельных обмоток, а затем подключением параллельно последовательным обмоткам сопротивления.
При реостатном торможении, которое используется в качестве служебного, каждая группа двигателей работает самостоятельно на свой реостат, что исключает влияние одной группы двигателей на другую при неравенстве характеристик и возникновении юза и боксования. Переход на режим электрического торможения не зависит от положения РК и определяется только временем включения тормозных контакторов Т1 и Т2, замыкающих оба тормозных контура.
При выходе из строя одного тягового двигателя возможно движение вагона на одной группе двигателей. При этом пуск должен производиться на позиции XI, а торможение — на позициях TI и ТII. Исчезновение напряжения в контактной сети или перегорание предохранителя в цепи обмотки параллельного возбуждения приводит к автоматическому замещению электрического тормоза торможением с независимым возбуждением последовательных обмоток от аккумуляторной батареи.
Для пуска вагона необходимо предварительно поднять пантограф и включить следующие аппараты: высоковольтные автоматические выключатели АВ1 и АВ2, выключатели аккумуляторной батареи, двигателя-генератора, выключатели цепи управления ВУ1 и ВУ2, разъединитель цепи управления РУМ, нажать педаль безопасности ПБ, а затем установить реверсивную рукоятку в положение «вперед» или «назад».
При замыкании ПБ по проводу 4 возбуждаются удерживающие катушки соленоидных (барабанных) тормозов М0М1—М0М4 и реле РРТ2, предназначенное для включения рельсовых тормозов через контактор КРТ2 при сбросе педали безопасности. При повороте реверсивной рукоятки в рабочее положение подается напряжение иа провод 2 или 3, возбуждается катушка реверсора «вперед» или «назад» и реверсор переходит в заданное положение. Через контакты управления реверсора включается реле РХ, контролирующее положение реверсора, и реле РРТ1, подготавливающее цепь ПАБ-У2-24-0 для включения аварийного контактора рельсовых тормозов КРТ2 при сбросе педали безопасности во время работы вагона на линии, когда реверсивная рукоятка находится в рабочем положении.
Рис. 5-26. Схема цепей управления трамвайного вагона серии КТМ-5М.

Маневровый режим. При постановке рукоятки контроллера водителя на позицию М подается напряжение на поездные провода 5 и 6.
По проводу 5 возбуждаются подъемные катушки линейных контакторов ЛК1 и ЛК4, по проводу 25 возбуждается ЛК2, а по проводу 6 — контактора Ш. При включении контакторов III, ЛК1, ЛК2 и ЛК4 тяговые двигатели подключаются к сети при полностью введенном пусковом сопротивлении. Затем происходит автоматическое растормаживание соленоидных тормозов путем включения силовых катушек тормозов ТММ1 — ТММ4 через блок-контакты контактора ЛК4, реле времени РВК2 и РВК3, контакторы К2 и К3, конечные выключатели соленоидных тормозов ВК1—ВК4 и вагон начинает двигаться с минимальной скоростью.
Пуск двигателей. Позиция XI. На позиции контроллера водителя XI дополнительно подастся напряжение на провода 1, 11, 12 и 20. От провода 1 получает питание обмотка возбуждения и якорь серводвигателя.
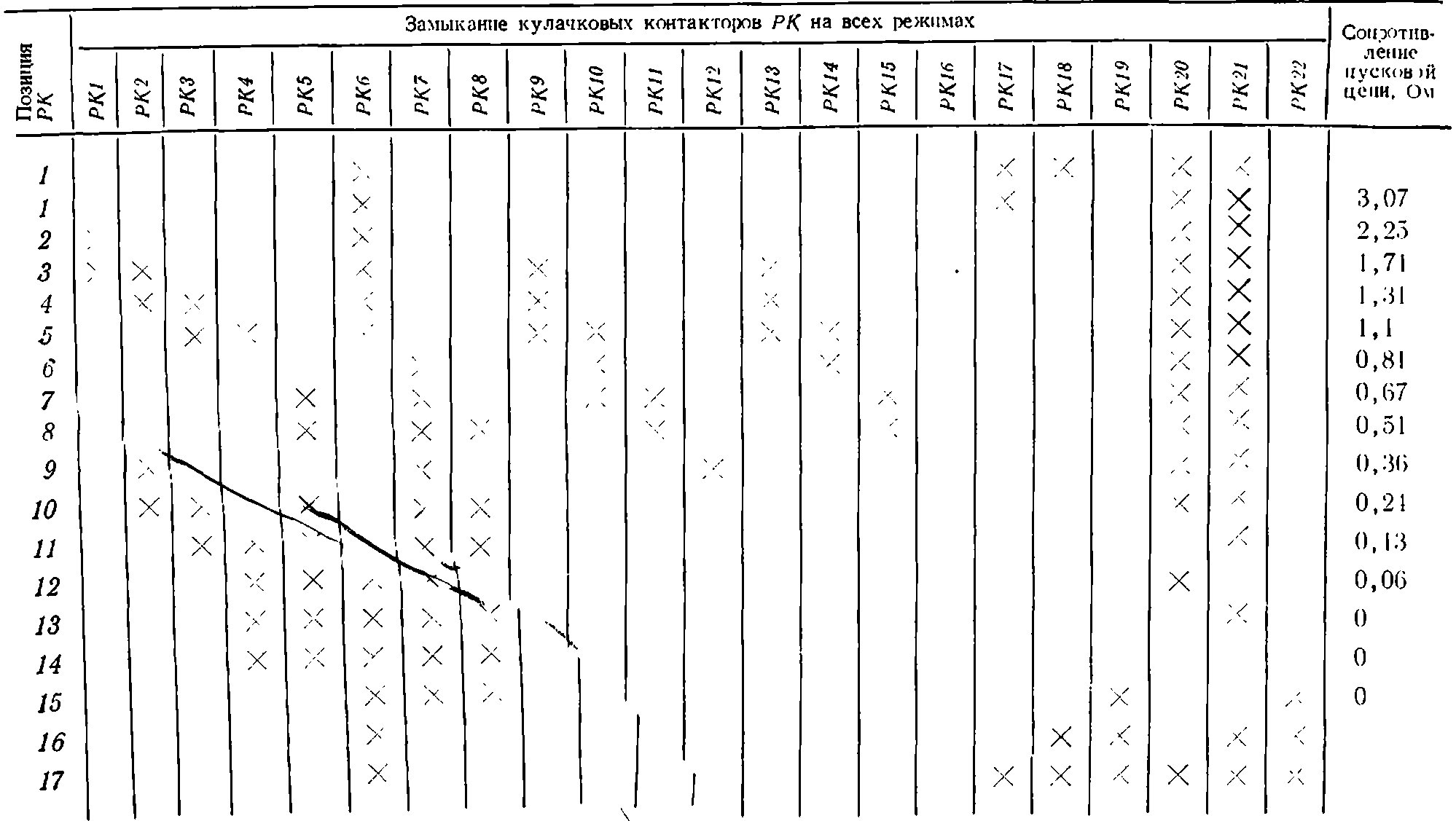
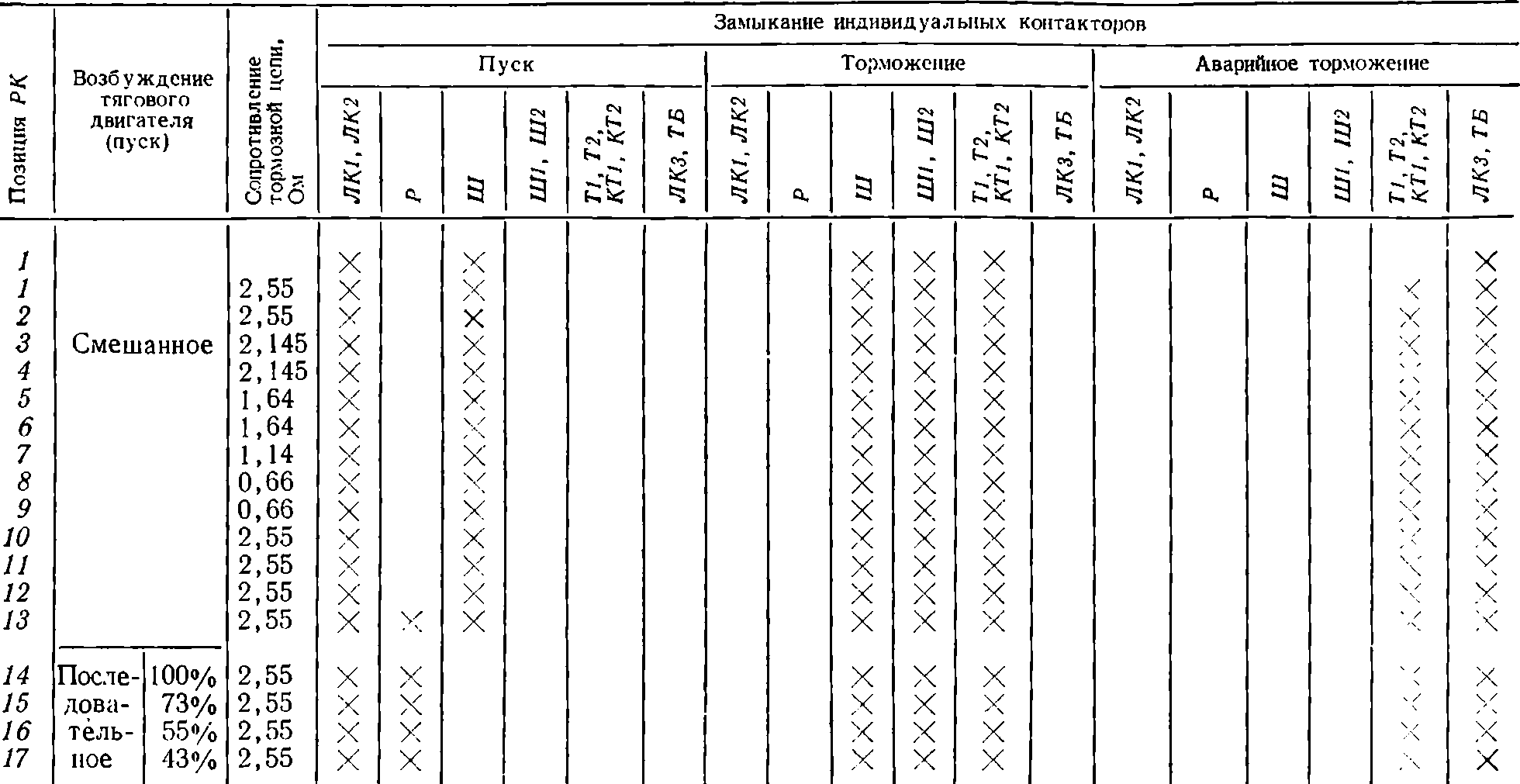
Рис. 5-27. Последовательность замыкания кулачковых контакторов реостатного контроллера и индивидуальных контакторов трамвайного вагона серии КТМ-5М.
При переходе РК с одной позиции па другую силовые контакты РК выключают часть пускового сопротивления, ток в силовой цепи увеличивается скачком, и реле РУТ срабатывает. Блок-контакт 1Г—1Д этого реле размыкается, однако якорь серводвигателя продолжает получать питание через контакт РКМ1. При подходе к следующей позиции размыкаются последовательно контакты РКм2 и РКМ1 и замыкается контакт РКП. Якорь серводвигателя теряет питание и замыкается накоротко контактом РКП и замыкающим блок-контактом реле РУТ. Серводвигатель останавливается и, таким образом, осуществляется фиксация вала РК на позициях.
На позиции РК 13—14 от проводов 11-12 получает питание катушка стоп-реле СР, и якорь серводвигателя замыкается накоротко. Эта позиция РК является первой фиксированной ходовой позицией с полностью выведенными пусковыми сопротивлениями, отключенными параллельными обмотками и полным полем обмоток последовательного возбуждения и используется при движении па малых скоростях.
На позиции Х2 контроллера водителя изменяется величина подпитки подъемной катушки реле РУТ (20 провод). Ток отпадания реле увеличивается до 160 А, что соответствует ускорению, при пуске 1,0 м/с2; РК при этом останавливается на позиции 13—14.
При установке рукоятки контроллера водителя в положение Х3 прекращается питание стоп-реле по проводу 12 и групповой РК начинает вращаться под контролем реле РУТ до позиции 17, на которой он останавливается, так как снова возбуждается стоп-реле СР по проводу 11. На позициях 14—17 происходит ослабление поля обмоток последовательного возбуждения тяговых двигателей. Позиция РК 17 является второй фиксированной ходовой позицией с максимальным ослаблением поля и используется для движения с максимальной скоростью.
На позиции Х3 включающая катушка реле РУТ включается между позициями РК, ток отпадания реле определяется током силовых катушек и равен 210 А, что соответствует максимальному ускорению 1,3—1,5 м/с2. Кроме того, с целью повышения надежности фиксации РК на позиции 17 включается подъемная катушка реле РУТ по электрической цепи 17—17А—18В—18А—18Г—0. Это реле замыкает контур якоря серводвигателя РКЦ
Выбег. При переводе рукоятки контроллера водителя с ходовых позиции на нулевую (выбег) выключаются сначала контакторы ЛК1 и ЛК4, а затем через блок-контакты ЛК2 (25—6Е) выключаются контакторы ЛК2 и Р.
Однако при необходимости быстрого перехода с ходового режима на тормозной линейный контактор ЛК2 отключается одновременно с ЛК1 благодаря отключению па тормозных режимах кулачкового контактора контроллера водителя У1—25. Это обеспечивает быстрое восстановление схемы электрического торможения.
Возврат РК на позицию 1 при постановке контроллера водителя на нуль, при переходе с пускового режима на тормозной или наоборот происходит только при отключенных контакторах ЛК1 и тормозных контакторах КТ1 и КТ2 через кулачковый контактор РК2—РК17 по цепи 17—17Ж-17С-17И—1Б—1В—1Д —0. При этом питание обмотки возбуждения серводвигателя осуществляется от провода 17 через контакт реле обмотки возбуждения РОВ, которое обеспечивает снятие напряжения с обмотки возбуждения при возврате РК на позицию 1 с выдержкой времени после остановки серводвигателя.
Фиксация вала РК при возврате па позицию 1 осуществляется через контакты стоп-реле СР, которое закорачивает якорь серводвигателя на этой позиции.
Электрическое реостатное торможение. На позиции Т1 контроллера водителя независимо от положения РК сразу же включаются контакторы Т1 и Т2 (при условии, что контактор ЛК2 отключен), а также контактор Ш. При этом каждая группа двигателей включается на свой реостат.
Если в момент электрического торможения РК находился на позициях 3—9, то контакторы КТ1 и КТ2 не включаются. Серводвигатель по цепи возврата получает питание, и РК возвращается на позицию 1. При возврате РК величина тормозного сопротивления благодаря отключенным контакторам КТ1 и КТ2 изменяется незначительно.
На позиции Т1 контроллера водителя в цепь обмоток параллельного возбуждения двигателей вводится добавочное сопротивление Р32—Р33 и торможение производится с минимальным замедлением 0,4—0,6 м/с2.
На позициях ТII и TIII контроллера водителя происходит постепенное усиление поля и тормозного момента за счет уменьшения сопротивления Р32—Р33 в цепи обмоток параллельного возбуждения двигателей при помощи контакто|ров Ш1 и Ш2. Позиции TI, ТII и ТIII используются для уменьшения скорости движения, а также для спуска на уклонах.
На позиции TIV контроллера водителя подается напряжение на провод 1. Если РК вернулся на первую позицию и включились контакторы КТ1 и КТ2, то начинается рабочее вращение вала РК, который осуществляет выведение тормозных сопротивлений из обоих тормозных контуров.
Всего предусмотрено пять тормозных характеристик, получаемых на позициях РК (1—8). Вращение РК при торможении также происходит под контролем реле РУТ. Остановка вала РК на позиции 8 осуществляется при помощи стоп-реле СР.
При истощении электрического тормоза на позиции Т1V и снижении тока якоря тяговых двигателей до 100А выключается реле минимального тока РМТ и по цепи 13—13А—13В—13Г—0 включается контактор К1.
Контакты последнего включают силовые катушки соленоидных тормозов, а блок-контакты 4—4Б через реле времени РВ4 и контактор К4 обесточивают удерживающие катушки МОМ и соленоидные тормоза посредством пружин приходят в тормозное положение. Происходит сложение сил соленоидного и электрического тормозов, в результате вагон останавливается.
При переводе рукоятки контроллера водителя с позиции ТIV на ТII, TIII, TI или 0 контактор K1 отключается, соленоидные тормоза под действием пружин остаются в заторможенном положении и эффективность тормоза увеличивается благодаря отключению силовых катушек ТММ. Растормаживание производится автоматически на позиции М контроллера водителя.
На позиции ТР контроллера водителя помимо электрического торможения, аналогичного позиции TIV, включается рельсовый тормоз при помощи контактора КРТ. Ввиду большого расхода энергии пользоваться позицией ТР можно только в экстренных случаях, когда необходимо осуществить быструю остановку вагона.
При исчезновении напряжения в сети или перегорании предохранителя в цепи обмотки параллельного возбуждения происходит автоматическое замещение рабочего электрического торможения на торможение при независимом возбуждении обмоток последовательного возбуждения с питанием их от аккумуляторной батареи. При этом через размыкающий блок-контакт реле PH (8А—8В) получает питание катушка негативного контактора ЛК3, и он отключается. Одновременно с этим по цепи 8—8А—8В—8Г—8Д—0 возбуждается катушка контактора ТБ, и после его включения подается напряжение от аккумуляторной батареи на обмотки последовательного возбуждения тяговых двигателей. Так как якори в обеих группах двигателей остаются замкнутыми на тормозное сопротивление, то возникает электрическое торможение при независимом возбуждении последовательных обмоток возбуждения.
Работа на двух двигателях. Схема предусматривает возможность работы на двух двигателях при аварии одного из двигателей любой группы. Аварийный двигатель отключается при помощи специального отключателя, который имеет три положения: первое — работают обе группы двигателей; второе и третье — работает одна пли другая группа двигателей (M1, м3 или м2, М4).
При отключении одной группы двигателей аварийное торможение с независимым питанием последовательных обмоток от аккумуляторной батареи схемой не предусматривается. Режим пуска под контролем реле РУТ сохраняется. При этом пуск вагона должен производиться на позициях X1 и Х2, торможение — на позициях TI, ТII, ΤIII с переходом при низких скоростях на позицию ТIV.
Устройство безопасности служит для автоматического отключения силовой цепи и затормаживания вагона при отпускании педали безопасности. Для этой цели в схему введен контакт (У1—4), который замыкается при нажатии на педаль. В процессе движения водитель должен постоянно нажимать на педаль безопасности. При отпускании педали выключаются линейные контакторы ЛК1, ЛК2 и ЛК4 снимается напряжение с катушек М0М1—М0М4 отключается реле РРТ2. Это приводит к торможению вагона при совместном действии соленоидных тормозов от пружинного привода и рельсовых тормозов. При последующем нажатии на ПБ рельсовые тормоза отключаются, а растормаживание соленоидных тормозов производится автоматически на позиции М контроллера водителя.
Вспомогательные цепи высокого напряжения, К вспомогательным цепям высокого напряжения относятся: цепь двигателя и генератора управления, цепи отопления салона и кабины водителя, цепь стеклообогрева, цепь главного освещения салопа и др. Главное освещение салона осуществляется при помощи ламп накаливания. Вспомогательные цепи включаются отдельными выключателями.
Защита электрооборудования. Защита силовой цепи от перегрузок и/ к. з. осуществляется при помощи максимальных токовых реле РП1-3 и РП2-4, включенных в каждую группу тяговых двигателей, и автоматического выключателя АВ1,
Реле перегрузки отрегулированы на ток срабатывания 400А, а автоматический выключатель — на 800 А. В том случае, если ток в цепи тяговых двигателей достигает величины тока срабатывания реле РП, но якорь реле притягивается и размыкает своп контакты 2Г—2Д и 5—5Б в цепях катушек линейных контакторов ЛК1 и ЛД4, Контакторы отключают силовую цепь тяговых двигателей от сети.
Защита цепи параллельного возбуждения двигателей от к. з. осуществляется высоковольтным предохранителем на 900 В; вспомогательных цепей — автоматическим выключателем АВ2, имеющим «уставку» около 50—60А, а в отдельных цепях — высоковольтными плавкими предохранителями; защита аккумуляторной батареи осуществляется плавким предохранителем на 75 А и напряжение 120 В.