5-9. ЭЛЕКТРИЧЕСКАЯ СХЕМА ТРАМВАЙНОГО ВАГОНА СЕРИИ РВЗ-6
а) Схема силовой цепи
Вагон оборудован автоматической системой управления. Режимы работы вагона задаются контроллером управления, имеющим нулевую позицию, четыре позиции хода п четыре тормозных позиции.
Пуск вагона после остановки. На ходовой позиции XI контроллера водителя осуществляется маневровый режим движения. Пусковые сопротивления при этом полностью введены в цепь двигателей. Эта позиция предназначена для передвижения вагона в депо по стрелкам и крестовинам со скоростью до 10 км/ч (рис. 5-22 и 5-23).
При установке рукоятки контроллера управления на последующие ходовые позиции (Х2—Х4) включаются контакторы ЛК1, ЛК2, ТР1 и ТР2. Контакторы ЛК1 и ЛК2 замыкают цепь якорей тяговых двигателей с полностью введенными пусковыми сопротивлениями Р3— Р11 на напряженно контактной сети. Контакторы ТР1 и ТР2 подают питание на параллельные обмотки возбуждения двигателей с введенным в их цепь сопротивлением Р30—Р38.
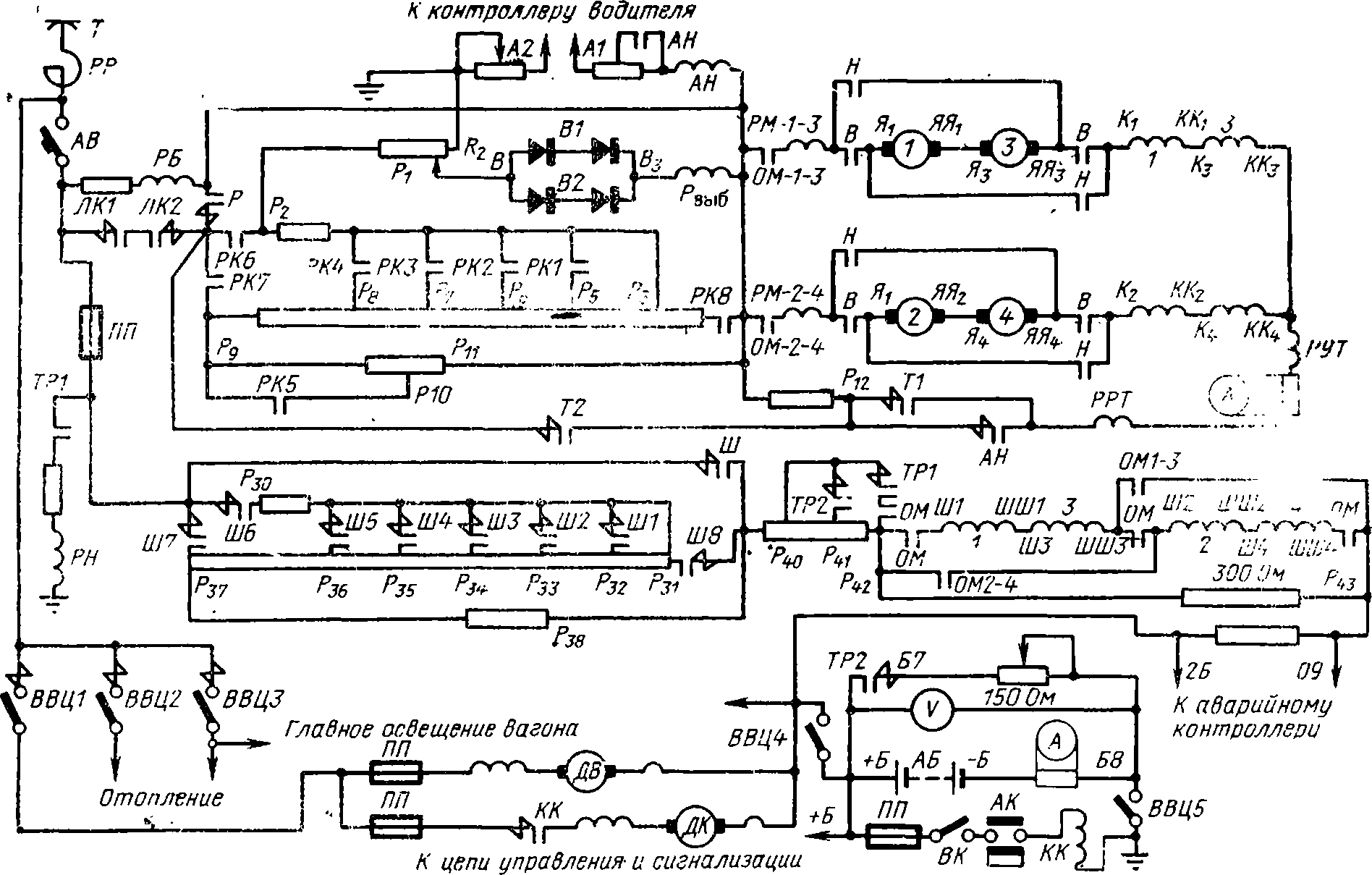
Рис. 5-22. Схема силовой цепи трамвайного вагона серии РВЗ-6.
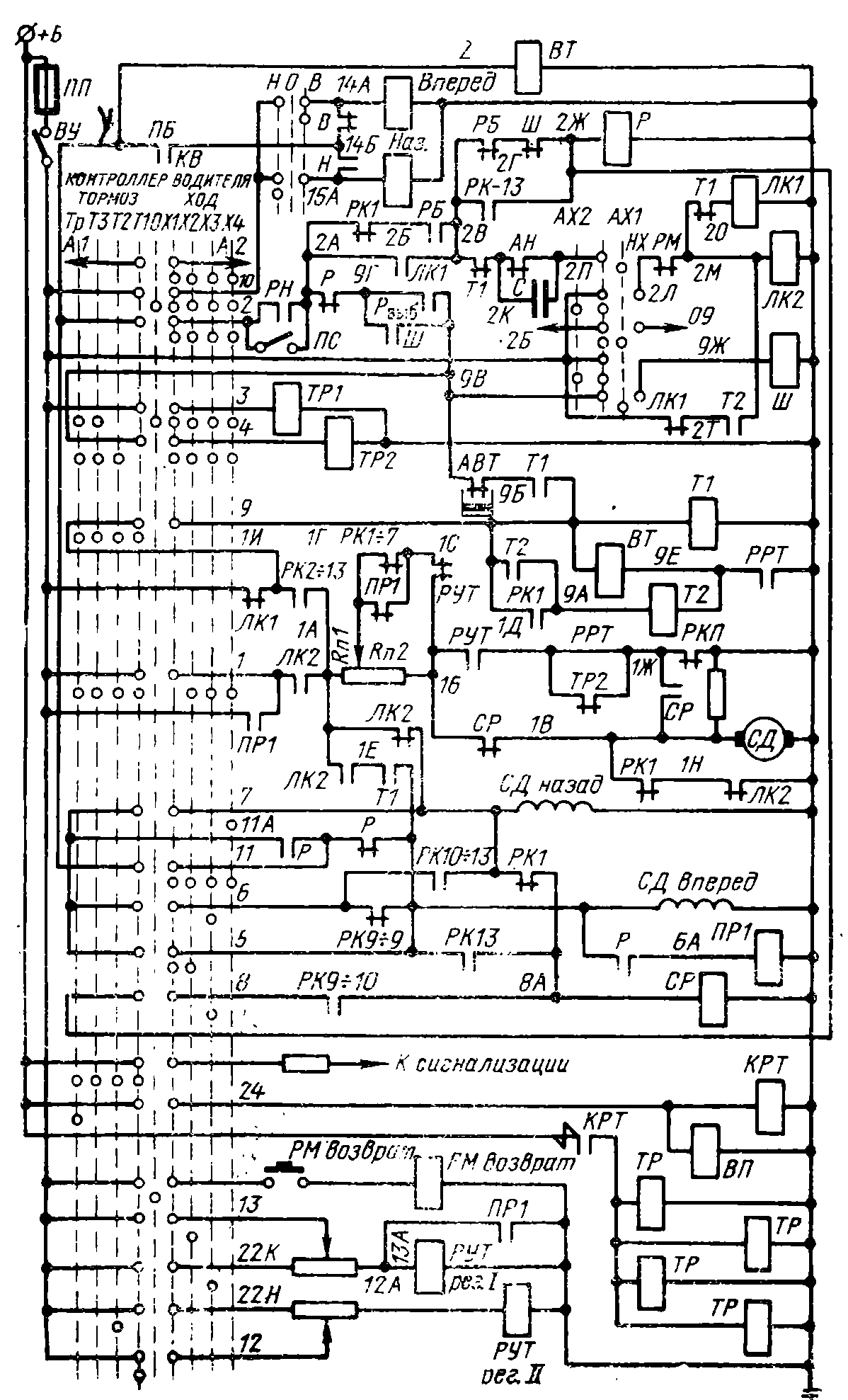
Рис. 5-23. Схема цепей управления трамвайного вагона серин РВЗ-6.
При пуске вагона после остановки противо- э. д. с. двигателя имеет небольшую величину, поэтому срабатывает реле выбега РВ, включенное по дифференциальной схеме между контактной сетью и тяговыми двигателями. Реле выбега своими контактами включает контактор Ш, выводящий сопротивление из цепи обмоток возбуждения. Таким образом, пуск и разгон вагона после остановки происходят при максимальном параллельном возбуждении двигателей. Одновременно начинает работать групповой РК, который своими кулачковыми контакторами PK1—РК8 производит постепенное выведение пусковых сопротивлений из цепи якорей тяговых двигателей.
На позиции 7 в цепи якорей остается включенной одна секция сопротивления Р10— Р11.
На позиции 8 параллельно секции Р10—Р11 кулачковым контактором РК8 подключается сопротивление Р3—Р9, т. е. в процессе пуска секция сопротивления Р3—Р10 используется дважды, обеспечивая получение двенадцати реостатных позиций с помощью восьми кулачковых контакторов группового РК. Вращение вала РК происходит под контролем реле ускорения. Величина ускорения при пуске зависит от положения рукоятки контроллера на ходовых позициях. Установка контроллера на позицию Х2 обеспечивает минимальное тяговое усилие, а на позицию Х4 — максимальное усилие. При установке контроллера управления в ходовое положение Х2 движение РК прекращается на позиции 13, где замыкается контактор Р, выключающий пусковые сопротивления, и размыкается контактор Ш. Это начальная ходовая позиция вагона при максимальном возбуждении параллельной обмотки двигателя. На позициях контроллера управления Х3 и Х4 вал РК вращается в обратном направлении, включая кулачковые контакторы Ш1—Ш8. Это приводит к постепенному ослаблению возбуждения тяговых двигателей и, следовательно, к повышению скорости вагона. Последовательность замыкания кулачковых контакторов РК показана на рис. 5-24.
При установке рукоятки контроллера водителя на позицию Х3 РК остановится на ходовой позиции (позиция 17 системы), а при установке на позицию Х4 — на позиции 1 (позиция 26 системы), являющейся позицией максимальной скорости движения вагона.

Рис. 5-24. Последовательность замыкания кулачковых контакторов трамвайного вагона серии РВЗ-6.
Пуск вагона после выбега. При скорости выбега меньшей чем скорость, при которой может произойти рекуперативное торможение, пуск и разгон происходят так же, как и в случае пуска с остановки, т. е. при максимальном возбуждении (замкнут контактор Ш). Если же скорость выбега больше скорости, при которой начинается рекуперативное торможение, то реле выбега РВ при этом не сработает и контактор Ш не замкнется. Таким образом, при работе РК наряду с выведением пусковых сопротивлений контакторными элементами Ш1 — Ш8 будут также выводиться сопротивления из цепи возбуждения двигателя, т. е. будет постепенно увеличиваться параллельное возбуждение. По мере продвижения РК напряжение па зажимах тяговых двигателей будет постепенно увеличиваться, приближаясь по величине к напряжению контактной сети. Когда разность напряжений контактной сети и на зажимах тяговых двигателей уменьшится до 70—90 В, якорь балансного реле РБ отпадет и замкнется контактор Р, выводящий пусковые сопротивления. Благодаря этому уменьшается время включения схемы. Так как разность напряжений при замыкании контактора Р имеет небольшую величину, увеличение тока будет незначительным. После замыкания контактора Р дальнейшее продвижение РК будет зависеть от положения рукоятки контроллера водителя. Если последняя установлена на позицию Х2, то РК будет продолжать продвижение в прежнем направлении к позиции К3, т. е. будет увеличиваться параллельное возбуждение, а следовательно, и рекуперативное торможение то скорости, соответствующей низшей ходовой характеристике (позиция К3).
При установке рукоятки контроллера водителя на позицию Х3 РК автоматически дойдет до позиции 17, причем в зависимости от скорости вагона создается тяговый или тормозной режим. Если рукоятка контроллера водителя установлена на позицию Х4, то РК изменит направление движения, т. е. будет двигаться в направлении первой позиции, ослабляя параллельное возбуждение двигателей. В этом случае происходит дальнейший разгон вагона. Следовательно при включении двигателей после выбега достигается автоматический выход на ходовую характеристику, соответствующую положению рукоятки контроллера водителя.
При включении двигателя после выбега и до момента включения контактора Р вал РК вращается с максимальной скоростью.
Электрическое торможение. Реостатное торможение осуществляется замыканием контакторов Т1 и Ш. При этом возбуждаются обмотки параллельного возбуждения двигателей, а якори, соединенные последовательнопараллельно, замыкаются па отдельное тормозное сопротивление Р11—Р12. Так как поле последовательных обмоток возбуждения направлено встречно полю параллельных обмоток, двигатели при генераторном режиме имеют встречно-смешанное возбуждение.
Тормозное усилие при постоянной величине сопротивления Р11—Р12 в широком диапазоне скоростей изменяется незначительно. Поэтому при любой скорости вагона включение контакторов Т1 и Ш вызывает достаточно эффективное торможение. При возвращении РК на позицию 1 включается контактор Т2, подключающий параллельно сопротивлениям Р11—Р12 группу сопротивлений Р3—Р11. После включения контактора Т2 начинает вращаться вал РК. уменьшая при этом величину тормозного сопротивления Р3 — Р11.
Реостатный контроллер работает под контролем реле РУТ. Тормозное усилие регулируется изменением параллельного возбуждения при помощи контакторов ТР1 и ТР2. При установке рукоятки контроллера водителя на позицию Т1 контакторы ТР1 и ТР2 не замыкаются и в цепи параллельных обмоток остается сопротивление Р40—Р42, т. с. возбуждение, а следовательно, и тормозное усилие имеют минимальную величину. При установке рукоятки контроллера водителя на позицию Т2 замыкается контактор ТР2, возбуждение и тормозное усилие при этом усиливаются. На позиции Т3 при замыкании контактора ТР1 происходит дальнейшее увеличение тормозного усилия. Одновременно с замыканием контакторов TP1 и ТР2, регулирующих параллельное возбуждение, в связи с поворотом рукоятки контроллера водителя на позиции Т2 и Т3 происходит изменение регулировки реле РУТ путем изменения тока в регулировочной катушке РУТ11.
Движение вагона при двух отключенных двигателях. При аварии одного из двигателей движение вагона может осуществляться на двух двигателях. В этом случае при помощи отключателя двигателей ОМ аварийный двигатель отключается от цепи. При отключении любой пары двигателей контактами ОМ прерывается цепь якорей и параллельные обмотки замещаются сопротивлением Р41-Р42.
Разгон вагона с двумя отключенными двигателями допускается только па позициях X1 и Х2 (реле ускорения при этом обтекается током одной группы двигателей, и, следовательно, ток отключения реле удваивается).
Управление аварийным контроллером. Аварийный контроллер имеет три позиции: НХ, АХ1 и АХ2. Первая позиция (ИХ) соответствует управлению от контроллера водителя; позиции АХ1 и АХ2 — управлению от аварийного контроллера. При переходе с позиции АХ1 на позицию АХ2 изменяется поле двигателей с полного на ослабленное, что повышает скорость движения вагона до 25 км/ч. Характер ведения вагона пилообразный: после разгона необходимо переходить на выбег.
б) Схема цепей управления
Схема управления получает питание от аккумуляторной батареи напряжением 50 В, постоянно подзаряжаемой током параллельных обмоток и током, проходящим через двигатели вентилятора, компрессора и цепи освещения. Напряжение к контроллеру подается по проводу У1 через выключатель управления ВУ.
Для пуска вагона необходимо установить реверсивную рукоятку контроллера водителя на ходовое положение, нажать на педаль безопасности ПБ и включить главную рукоятку на одно из ходовых положений (X1—Х4). При установке рукоятки контроллера па позицию XI замыкаются кулачковые контакторы 2, 3, 4, 5, 10 и 11. От провода 10 питание подается на кулачковые контакторы реверсора в контроллере управления и в зависимости от установки реверсивной рукоятки возбуждается соответствующий вентиль пневматического привода реверсора «вперед» или «назад». После переключения реверсора в положение, соответствующее положению реверсивной рукоятки, напряжение подается на провод 14Б, питающий цепи линейных контакторов ЛК1 и ЛК2 через замкнутые блок-контакты педали безопасности ПБ (14Б—14В) и кулачковый контактор 2 (14В—2) контроллера управления. После включения электромагнитный контактор ЛК1 питается через блок-контакты 2А—2В и его дальнейшая работа не зависит от положения РК и балансного реле. Через кулачковые контакторы 3 и 4 контроллера управления включаются контакторы ТР1 и ТР2.
Для исключения рекуперативного торможения при повторном пуске вагона, движущегося с большой скоростью после выбега, в схеме установлено реле выбега Рвыб. В случае пуска вагона после остановки или при малой скорости противо- э. д. с. тяговых двигателей мала, а ток, протекающий по подъемной катушке реле, будет достаточен для его срабатывания. После срабатывания реле Рвыб через его блок-контакты (9Г— 9В) включается контактор Ш, выводящий сопротивления из цепи обмоток параллельного возбуждения. На позиции X1 кулачковый контактор 1 контроллера остается разомкнутым, якорь серводвигателя СМ не получает питания и движение вагона происходит на позиции 1 РК. При перестановке рукоятки контроллера водителя с позиции Х4 или Х3 на X1 и движении вагона со скоростью выше 20 км/ч параллельно кулачковому контактору 1 включается блок-контакт ПР1 (У1—1) реле ПР1 и осуществляется рекуперативный тормозной режим. Таким образом, позиция X1 при пуске с места и движении вагона со скоростью 12—16 км/ч является маневровой, а при переходе с позиции Х4 или Х3 — рекуперативной. При постановке рукоятки контроллера управления на позиции автоматического пуска (Х2— Х4) через контакты ЛК2 (1— 1А) получает питание якорь серводвигателя, который начинает вращать вал РК в направлении «вперед», т. е. от 1 к 13 позиции (обмотка возбуждения «вперед» возбуждена от провода 11).
Реостатный контроллер при включенном контакторе Р работает автоматически, и ход его регулируется реле РУТ. При срабатывании реле РУТ ток превышает пределы регулирования, снижается частота вращения серводвигателя, хронометрическое время вращения РК удлиняется и, наоборот, при его отключении ток снижается до уставки, а частота вращения РК увеличивается.
Работа РК при включенном контакторе Р на ходовом режиме при втором обороте осуществляется также под контролем реле РУТ. При его срабатывании вал контроллера затормаживается до полной остановки; дальнейшее движение вала восстанавливается только после снижения тока до минимальной уставки реле РУТ и отпадания якоря. Стоп-реле СР предназначено для остановки РК на фиксированных позициях.
Последовательная катушка реле РУТ включена в силовую цепь вагона и обтекается током двух групп двигателей. Если ток в цепи двигателей небольшой, то замыкаются контакты РУТ (1С—1Б) и серводвигатель начинает вращаться. При увеличении тока тяговых двигателей реле срабатывает и замыкаются контакты РУТ (1Б—1Д), что приводит к подготовке тормозного контура цепи серводвигателя. При этом питание СД между позициями поддерживается блок-контактами СР (1Б— 1В). Вблизи фиксированной позиции и на позиции замыкаются контакты РКП (1Ж— 0), что приводит к замыканию накоротко якоря СД и остановке вала РК.
Движение РК возобновляется при уменьшении проходящего через последовательную катушку реле РУТ тока до тока уставки реле. Реле выключается, а якорь серводвигателя снова получает питание по цепи 1Б—1В, и вал РК начинает вращаться. Ток отключения реле ускорения регулируется изменением намагничивающего тока в пенях регулировочных катушек I и II, расположенных на одном сердечнике с последовательными катушками реле РУТ.
Установка рукоятки контроллера водителя па позицию Х2 соответствует минимальному току отключения реле, а на позицию Х4— максимальному. Когда РК достигнет позиции 13, через блок-контакты РК (2В— 2Ж) включится контактор Р. После его включения блок-контактом Р (2Л—9Г) отключается Ш.
Если рукоятка контроллера установлена на позиции Х2, то вращение вала РК прекратится на позиции 13, так как от провода 5 через блок-контакты РК 13 (5—8А) получает питание катушка стоп-реле СР, которое своими блок-контактами 1Б—IB и 1В-1Ж прерывает питание якоря серводвигателя и замыкает его накоротко. Обмотка возбуждения «вперед» СД продолжает получать питание от провода 5.
При перемещении рукоятки контроллера водителя иа позицию Х3 вал РК после замыкания контактора Р изменит направление вращения, так как от провода 6 через блок-контакт РК 10 -13 (6—7) получит питание обмотка возбуждения «назад» СД. На позиции РК 10 от провода 8 через блокировку РК 9—10 (8—8А) возбуждается стоп-реле СР и РК останавливается.
При установке рукоятки контроллера водителя на позицию Х4 РК достигнет позиции 1, так как от провода 7 будет возбуждена обмотка «назад» СД и на позиции 1 через блокировку РК1 (7—8А) получит питание стоп-реле.