Статор асинхронного двигателя (рис. 187) состоит из сердечника 2, обмотки 3 и корпуса (станины) 1. Сердечник статора является частью магнитопровода и собран из отдельных стальных пластин 4 толщиной 0,35—0,5 мм. Чтобы снизить до минимума потери энергии на вихревые токи, пластины изолируют друг от друга (чаще всего тонким слоем специального лака). В пазах стального статора укладывают провода, образующие трехфазную обмотку статора. Каждая фазная обмотка состоит из одной или нескольких катушек и рассчитана на определенное номинальное фазное напряжение. На двигателе указывается два номинальных напряжения (например, 380 и 220 В), отличающихся в 3 раз.
При большем напряжении сети фазные обмотки статора соединяют звездой, а при меньшем напряжении — треугольником. В том и другом случае к каждой фазной обмотке подводится одинаковое напряжение, являющееся номинальным фазным напряжением двигателя. Начала обмоток статора обозначают C1, С2, С3, а концы — С4, С5, С6.

Рис. 187. Статор асинхронного двигателя
Расположение выводов обмоток на щитке (рис. 188) удобно для соединения обмоток звездой или треугольником. Сердечник статора с обмоткой расположен (обычно запрессован) внутри корпуса, который отливают из чугуна или алюминиевого сплава. С боков сердечник статора закрывается крышками, в которых имеются подшипники.
Ротор двигателя представляет собой цилиндр, набранный из листовой электротехнической стали. Обмотка ротора состоит из нескольких медных стержней, соединенных на концах медными кольцами, и называется «беличьим колесом» (рис. 189, а). В новых асинхронных электродвигателях короткозамкнутая обмотка образуется путем заливки пазов ротора алюминием (рис. 189, б).
При прохождении по обмоткам статора трехфазного переменного тока создается магнитное поле, вращающееся с частотой n1 = 60f|p, где f частота подводимого к двигателю тока; р — число пар полюсов, которое зависит от числа катушек.
Если имеются три катушки, то вращающийся магнитный поток имеет два полюса (p=1) и пх![]() — 3000 об/мин. Если число катушек увеличить в 2 раза, то р 2, а n1 —
— 3000 об/мин. Если число катушек увеличить в 2 раза, то р 2, а n1 —![]() = 1500 об/мин.
= 1500 об/мин.
Магнитные линии поля статора пересекают обмотку ротора и в ней возникает ток, создающий свое магнитное поле. В результате взаимодействия магнитных полей ротор начинает вращаться в направлении магнитного поля статора с частотой п.
Ротор и поле статора вращаются с различными частотами. В противном случае не было бы пересечения ротора силовыми линиями магнитного поля статора. Отношение разности частот вращающегося поля статора п1 и ротора п к частоте магнитного поля статора называют скольжением (отставанием): S = (n1 — п)/п1 или S = (п1 — n)/n1 X 100%. При пуске двигателя п = 0, a S = 1, или 100%.
Во время холостого хода двигатель имеет минимальное скольжение (1—2%). С увеличением нагрузки уменьшается частота вращения ротора и увеличивается скольжение при номинальной нагрузке, достигая 5—6%.
Электромагнитная связь обмоток ротора и статора аналогична электромагнитной связи обмоток трансформатора. Поэтому с увеличением скольжения, когда линии магнитного поля статора чаще пересекают ротор, увеличивается ток в обмотках ротора и статора.
Частота тока в обмотке ротора зависит от скольжения: f2 = f1S. При пуске S = 1 и f2 = f1 = 50 Гц.
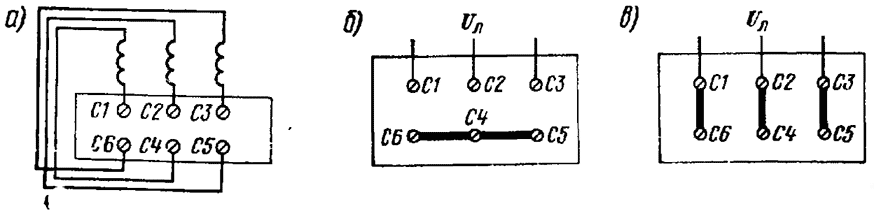
Pиc. 188. Расположение выполов обмоток на щитке (а) и соединение обмоток звездой (б) и треугольником (в)
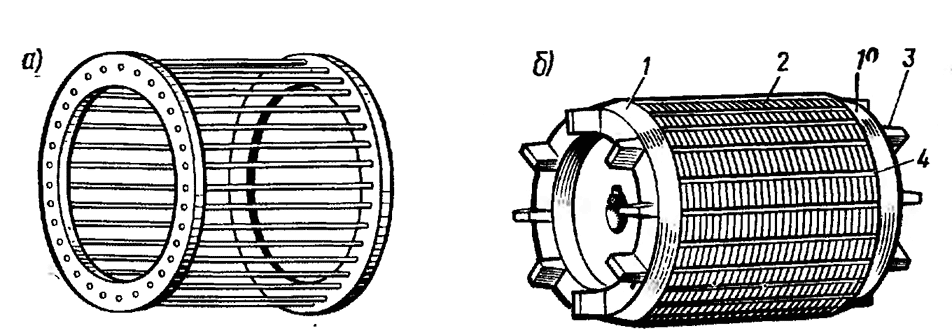
Рис. 189. Короткозамкнутая обмотка ротора (а) и короткозамкнутая обмотка ротора, выполненная η виде алюминиевой отливки (б):
1 — короткозамыкающие кольца; 2— листы магнитопривода; 3 — вентиляционные лопатки; 4 — стержни
С возрастанием частоты вращения ротора п уменьшается скольжение S и частота f2. При холостом ходе двигателя f2 = 1:4 Гц.
Благодаря простоте устройства, дешевизне и большой надежности в работе короткозамкнутые асинхронные двигатели получили широкое распространение. К недостаткам короткозамкнутых асинхронных двигателей относятся: значительное потребление тока в момент пуска; слабый пусковой вращающий момент; потребление реактивного тока из-за индуктивности обмоток статора, вызывающее снижение cos φ.
При пуске двигателя магнитное поле статора с максимальной частотой пересекает неподвижный ротор и в нем наводится наибольшая э. д. с. В результате этого ток в обмотках ротора и статора больше номинального в 5—8 раз. Пусковые токи не успевают нагреть машину до высокой температуры, но вызывают снижение напряжения в сети, что отрицательно влияет на работу других потребителей, включенных в эту же сеть.
Вращающий момент М асинхронного двигателя образуется в результате взаимодействия магнитного потока Ф статора с активной составляющей тока ротора Iа2 = I2cos ψ2. Следовательно, М = СФICos ψ2, где С — коэффициент, зависящий от конструкции двигателя; ф2 — разность фаз э. д. с. E2 и тока I2 ротора.
При пуске в короткозамкнутом роторе асинхронного двигателя возникает ток наибольшей частоты I2. Поэтому индуктивное сопротивление ротора ΧL2 — 2πf2L2 значительно больше активного r2. Активная составляющая тока ротора![]() и вращающий момент не достигают максимального значения. С увеличением скорости частота I2 тока в роторе и его индуктивное сопротивление начнут уменьшаться, что в свою очередь вызовет увеличение активной составляющей тока ротора и вращающего момента двигателя.
и вращающий момент не достигают максимального значения. С увеличением скорости частота I2 тока в роторе и его индуктивное сопротивление начнут уменьшаться, что в свою очередь вызовет увеличение активной составляющей тока ротора и вращающего момента двигателя.
Вращающий момент асинхронного двигателя достигает наибольшего значения при равенстве активного и индуктивного сопротивлений ротора, т. е. при r2 = XL2.
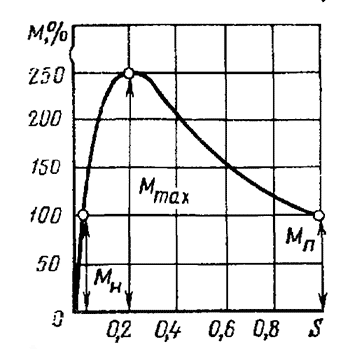
Рис. 190. Зависимость вращающего момента асинхронного двигателя от скольжения
При дальнейшем увеличении частоты вращения это равенство нарушается, т. е. Xl2 < r2 и вращающий момент вновь начнет уменьшаться.
При скольжении S = 1 (рис. 190) двигатель развивает пусковой момент Мπ, при номинальном скольжении SH == 0,02-:0,06— номинальный момент Мн. Максимальный момент Ммах двигатель развивает при скольжении, называемом критическим (SKP = 0,2).
Трехфазные асинхронные электродвигатели с короткозамкнутым ротором типа МСТ применяют в стрелочных электроприводах. Основные характеристики этих электродвигателей приведены в табл. 11.
Электродвигатели типов МСТ-0,25 и МСТ-0,3 устанавливают в электроприводах тяжелых и обычных стрелок электрической централизации, типа МСТ-0,6 — в электроприводах стрелок маневровых районов.
Таблица 11
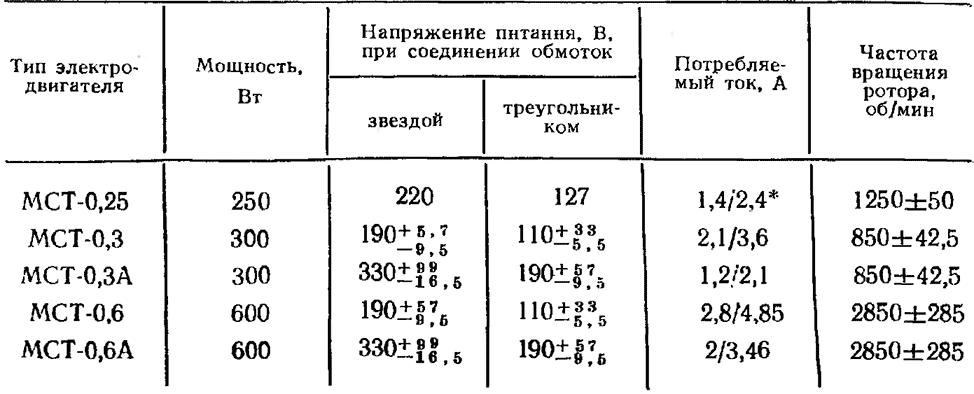
* В числителе указывается потребляемый ток при соединении обмоток звездой, в знаменателе — при соединении обмоток треугольником.
Для увеличения начального вращающего момента, необходимого для перевода стрелок, короткозамкнутую обмотку ротора стрелочных электродвигателей выполняют с повышенным активным сопротивлением. Изменение направления вращения ротора электродвигателя осуществляется переменой мест двух линейных проводов, подводящих ток к электродвигателю. При этом изменяется направление вращения магнитного поля статора, а следовательно, и ротора.
Асинхронные электродвигатели малой мощности включают в сеть переменного тока без пусковых приспособлений. При значительных мощностях (более 5 кВт) пусковой ток ограничивают.
Существуют два способа пуска в ход короткозамкнутых асинхронных электродвигателей. Непосредственный (прямой) пуск применяют в случае, если мощность двигателя значительно меньше мощности сети. Пуск переключением обмоток со звезды на треугольник можно использовать в том случае, если обмотки статора двигателя постоянно должны быть соединены треугольником. Для того чтобы снизить пусковой ток, на период пуска обмотки статора соединяют звездой (рис. 191, а). Благодаря этому напряжение на каждой обмотке снизится в √ 3 раз, а линейный ток уменьшится в 3 раза. Когда двигатель разовьет скорость, переключают рубильник Р2 и обмотки соединяют треугольником.
Для снижения пускового тока последовательно с обмоткой статора можно включать элементы с активным или индуктивным сопротивлением (рис. 191, б и в). После пуска эти элементы шунтируются.