§ 36. Электродвигатели постоянного тока и их характеристики
В зависимости от способа соединения обмотки якоря и обмотки возбуждения различают двигатели параллельного, последовательного и смешанного возбуждения.
Двигатель параллельного возбуждения.
До включения рубильника Р (рис. 157) необходимо поставить сопротивление пускового реостата R2 на максимум и сопротивление регулировочного реостата R1 на нуль. После включения в сеть якорь двигателя начнет вращаться, и по мере увеличения частоты вращения сопротивление пускового реостата постепенно уменьшают.
Рабочие характеристики двигателя (рис. 158, а) выражают зависимость частоты вращения п, вращающего момента М, тока I и к. п. д. η от развиваемой двигателем полезной мощности Р2 при неизменном напряжении сети. Частота вращения якоря двигателя п = (U —Iяrя)/(СФ).
При постоянном напряжении U ток возбуждения двигателя не меняется, но магнитный поток с увеличением нагрузки немного уменьшается из-за реакции якоря. С другой стороны, с увеличением нагрузки возрастает ток и внутреннее падение напряжения Uп =Iяrя. Уменьшение магнитного потока увеличивает частоту вращения якоря, а увеличение падения напряжения в обмотке якоря уменьшает ее. У двигателя параллельного возбуждения преобладает последняя причина, поэтому частота его вращения с увеличением нагрузки от нуля до номинальной уменьшается на 5—10%.
Полезная мощность, развиваемая двигателем, Ρ2=Μ2ηη/60, тогда вращающий момент М=30P2/(πn).
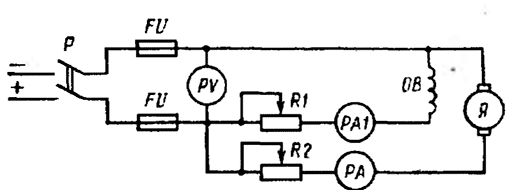
Рис. 157. Схема двигателя параллельного возбуждения
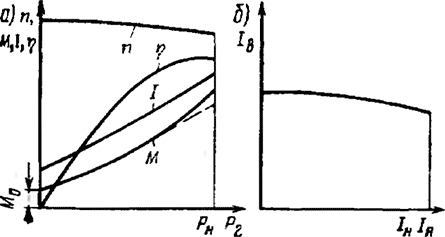
Рис. 158. Характеристики двигателя параллельного возбуждения
При постоянной частоте вращения двигателя п вращающий момент М был бы прямо пропорционален мощности Р2 и зависимость M=f(P2) имела бы вид прямой, проходящей через начало координат. В действительности частота вращения двигателя с увеличением нагрузки немного снижается и машина имеет момент холостого хода М0. Следовательно, кривая M—f(P2) отклоняется от прямой вверх и начинается с ординаты М0. Увеличение тока практически пропорционально полезной мощности двигателя Р2. С увеличением нагрузки к.п.д. двигателя быстро растет и достигает предельного значения 0,8—0,9 при нагрузке, близкой к Pн/2, оставаясь в дальнейшем почти постоянным. Чтобы с увеличением нагрузки частота вращения двигателя была постоянной, следует уменьшить магнитный поток двигателя, уменьшая ток возбуждения регулировочным реостатом.
Регулировочная характеристика выражает зависимость тока возбуждения от тока якоря (рис. 158, б) при постоянном напряжении U и частоте вращения п, т. е. Iв =f (Iя) при U = const и п = const. Эта характеристика показывает, как следует регулировать ток возбуждения, чтобы при различных нагрузках частота вращения двигателя оставалась неизменной.
Электродвигатели параллельного возбуждения применяют в тех случаях, когда при переменной нагрузке требуется, чтобы частота вращения оставалась постоянной и была возможность ее плавной регулировки. Электродвигатель параллельного возбуждения типа СЛ-571К применяют в автоматических шлагбаумах, ограждающих железнодорожные переезды со стороны автомобильных дорог. Такой двигатель имеет номинальную мощность 95 Вт при напряжении 24 В и токе 7 А, частота вращения якоря двигателя 2200 об/мин.
Двигатель последовательного возбуждения (рис. 159).
Обмотка возбуждения ОБ, обмотка якоря Я и пусковой реостат R соединены последовательно. Запуск двигателя последовательного возбуждения следует осуществлять с нагрузкой, которая должна быть не менее 20—25% номинальной вследствие того, что ток возбуждения равен току якоря. При холостом ходе или малых нагрузках потребляемый ток небольшой, следовательно, незначителен и магнитный поток Ф, а частота вращения двигателя п = U — Iя (rя + rв)/(СФ) достигает опасного значения. Во избежание разноса при внезапной разгрузке для этих двигателей применяют зубчатую передачу или непосредственное соединение вала двигателя с рабочим механизмом.
Рабочие характеристики двигателя последовательного возбуждения (рис. 159, б) имеют две особенности при увеличении нагрузки: резко снижается частота вращения п = U — Iя(rя + r)/(СФ); и резко увеличивается вращающий момент М = СМIФ = СМIЯСМ1IЯ — — См2IЯ, где См1 —- коэффициент пропорциональности магнитного потока и тока до насыщения стали, а постоянный коэффициент См2 — СМСМ1.
Свойства двигателей последовательного возбуждения развивать большие вращающие моменты, приблизительно пропорциональные квадрату тока при малых частотах вращения якоря и, наоборот, малые вращающие моменты при больших частотах вращения обусловливают их применение в подъемных механизмах, электровозах и тепловозах. Частоту вращения двигателя последовательного возбуждения обычно регулируют реостатом, включенным параллельно обмотке возбуждения.
Двигатели последовательного возбуждения типа МСП устанавливают в стрелочных электроприводах, предназначенных для дистанционного управления стрелками при электрической, диспетчерской и горочной централизации. Электрические характеристики этих двигателей приведены в табл. 10.

Рис. 159. Схема двигателя последовательного возбуждения (а) и рабочие характеристики двигателя последовательного возбуждения (б)
Электродвигатели типа МСП — двигатели закрытого типа, двухполюсные реверсивные, работают в повторно-кратковременном режиме. Для реверсирования имеют две обмотки возбуждения ОВ1 и ОВ2 (рис. 160). При включении первой обмотки якорь двигателя вращается в прямом направлении, а при включении второй обмотки — в обратном. Электродвигатели типа МСП-0,1 устанавливают в электроприводах, предназначенных для перевода стрелок легких типов. В новых разработках эти двигатели не применяют.
Тип электродвигатели | Номинальная | Номинальное | Потребляемый ток не более, А | Номинальная частота вращения, об/мин | К. II. Д. не менее |
|
| 30 | 10 | 1300 | 0,4 |
МСП-0,1 | 0,1 | 100 | 2,5 | 1500 | 0,6 |
|
| 160 | 1,8 | 1500 | 0,6 |
|
| 30 | 7,7 | 850+10% | 0,58 |
МСП-0,15 | 0,15 | по | 2,2 | 850+10% | 0,55 |
|
| 160 | 1,5 | 850+10% | 0,56 |
|
| 30 | 12,5 | 1460+10% | 0,67 |
МСП-0,25 | 0,25 | 100 | 3,3 | 1700+10% | 0,76 |
|
| 160 | 2,5 | 1700+10% | 0,7 |
Электродвигатели типов МСП-0,15 и МСП-0,25 предназначены для электроприводов тяжелых типов и на сортировочных горках.
Двигатель смешанного возбуждения (рис. 161).
Он имеет две обмотки возбуждения: параллельную ОВШ и последовательную ОВС. Обмотки возбуждения, расположенные на одних полюсах, имеют токи одного или разных направлений.
В первом варианте машин такого типа магнитный поток полюсов
Ф = Фовс + Ф0ВШ, а частота вращения![]()
Машины такого типа обладают свойствами двигателей последовательного возбуждения, но благодаря постоянному магнитному потоку параллельной обмотки возбуждения они не подвергаются опасности разноса при малых нагрузках и холостом ходе, когда незначителен магнитный поток Фовс.
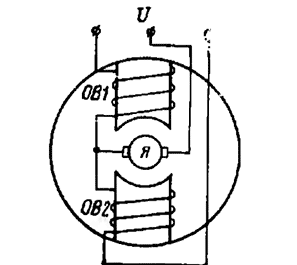
Рис. 160. Схема двигателя для перевода стрелок
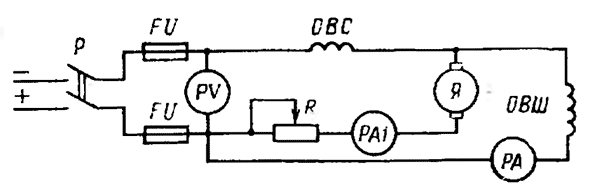
Рис. 161. Схема двигателя смешанного возбуждения
Во втором варианте обмотки соединены встречно и поток полюсов Ф = Фовш — Фовс, а частота вращения![]()
Двигатели такого типа обладают постоянной частотой вращения, так как при увеличении нагрузки усиливающийся магнитный поток вспомогательной последовательной обмотки немного размагничивает машину и компенсирует действие внутреннего падения напряжения.