Ограничение силы торможения по условию сцепления колес с рельсами в зависимости от скорости движения
Увеличение силы торможения электровоза может привести к нарушению сцепления колес с рельсами и возникновению юза. Для предотвращения его необходимо ограничивать силу торможения электровоза и, следовательно, ограничивать коэффициент сцепления колес с рельсами. Величина расчетного максимально допустимого коэффициента сцепления ψκ зависит от скорости движения электровоза. По коэффициенту сцепления, зная давление оси на рельс, равное 23 тс и количество осей электровоза, можно определить максимально допустимую силу торможения электровоза: Вэл=23х8 ψκ.
Расчетная кривая ограничения силы торможения в зависимости от скорости движения электровоза по условию сцепления, а также расчетные кривые токов возбуждения и токов якоря тяговых двигателей, кривые ограничения силы торможения по условию ограничения тока якоря и тока возбуждения тяговых двигателей показаны на рис. 55. Каждой точке кривой ограничения по сцеплению соответствует вполне определенный ток возбуждения и ток якоря- тяговых двигателей. Например, для скорости движения 50 км/ч и силы торможения электровоза 36 тс соответствует той возбуждения 545 А и ток якоря тяговых двигателей 860 А.
Таким образом, задаваясь различными токами на кривой ограничения по сцеплению, можно построить зависимость тока якоря от тока возбуждения тяговых двигателей. Следовательно, если система автоматического управления режимом электрического торможения будет ограничивать ток якоря в зависимости от тока возбуждения тяговых двигателей согласно зависимости Iя (Iв), то будет обеспечено ограничение силы торможения электровоза по условиям сцепления колес с рельсами.
При расчете системы автоматического управления для получения необходимой зависимости Iя (Iв) была принята кривая (участок b—с, см. рис. 46) максимально допустимой силы торможения по условию сцепления колес с рельсами в зависимости от скорости движения электровоза Вэл (ν), которая была получена опытным путем во время испытаний электровозов ВЛ80т на ВосточноСибирской дороге в 1970 г. Использование опытной зависимости Вал (v) позволяет увеличить силу торможения до 50 тс при скорости движения электровоза около 30 км/ч.

Рис. 35. Расчетные тормозные характеристики электровоза
В системе автоматического управления необходимую зависимость Iя (Iв) обеспечивает функциональный преобразователь. Параметры элементов функционального преобразователя и задатчика тормозной силы ЗТС подобраны так, что напряжение функционального преобразователя Uфп и напряжение задатчика тормозной силы Uзд.
В схеме автоматического управления режимом электрического торможения напряжение функционального преобразователя Uфп складывается с падением напряжения Uя на резисторах R4, R5, которое пропорционально действительному току якоря тяговых двигателей, и прикладывается на резисторы R25, R26 (рис. 56).
Напряжение от задатчика тормозной силы Uзд поступает на клеммы a0, b0 (см. рис. 54) блока ФП-РУ, если управление ведется из кабины 1-й секции, или на клеммы а0, b0, если управление ведется из кабины 2-й секции электровоза. Это напряжение выпрямляется диодными мостами Д27-Д32 и прикладывается к резистору R56. Сумма падений напряжения на части резистора R25 и резисторе R26 суммируется с напряжением задатчика тормозной силы Uзд в контуре, состоящем из резисторов R20, R25, R56, R21 и емкости С10.
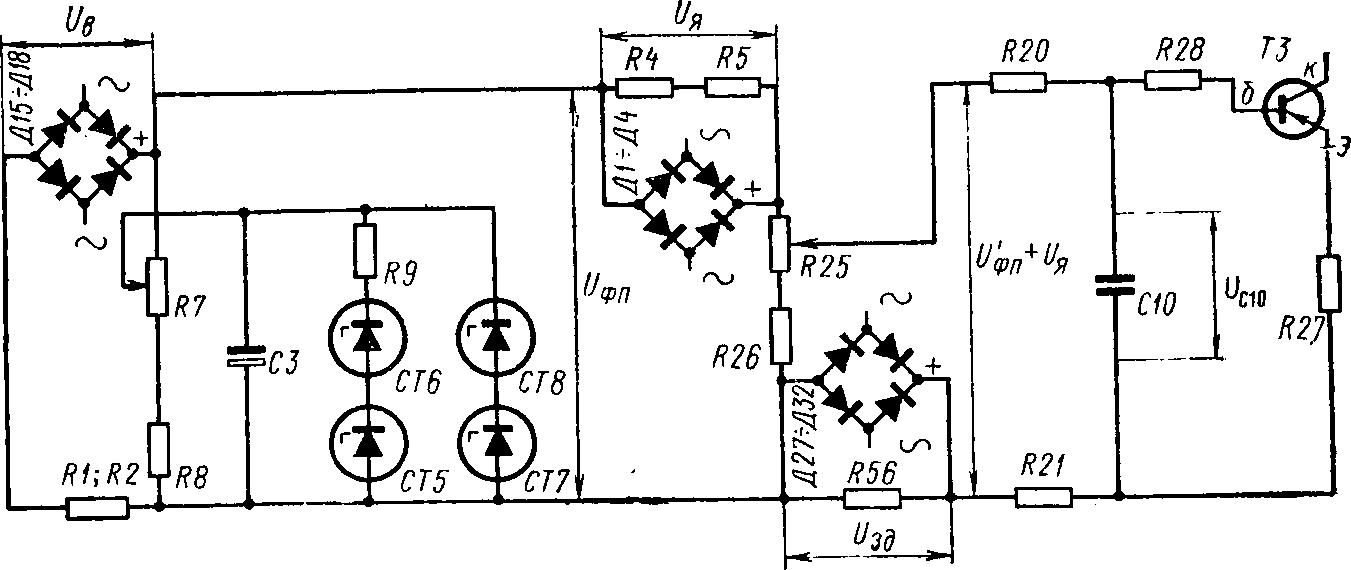
Рис. 56. Упрощенная схема канала ограничения тормозной силы по условию сцепления
Алгебраическая разность трех напряже ний (падением напряжения на резисторах R20, R21 можно пренебречь) выделяется на емкости С10:
![]()
Разность напряжений U зд — пропорциональна заданному току якоря Ia=f (IВ) по условию сцепления колес с рельсами.
1 Для заданного и действительного тока якоря принят один и тот же коэффициент пропорциональности.
В реальных условиях работы электровоза, во время ограничения силы торможения по условию сцепления, ток возбуждения и ток якоря тяговых двигателей все время плавно изменяются (увеличиваются или уменьшаются) в зависимости от изменения скорости движения. Поэтому напряжение Uc10 в цепи управления транзистора ТЗ увеличивает или уменьшает фазу его открытия. Ток в обмотке управления 4Н—4К все время изменяется. Ток якоря тяговых двигателей приближается к своему заданному значению. Устанавливается режим динамического равновесия, при котором соблюдается заданное соотношение между током якоря и током возбуждения.
Происходит ограничение силы торможения в зависимости от скорости движения электровоза.
Участок Ьс (см. рис. 46) на кривой положения 12 задатчика тормозной силы является границей силы торможения, допустимой по условию сцепления колес с рельсами.
Напряжение Uзд изменяется ступенчато в зависимости от положения рукоятки задатчика тормозной силы. Поэтому может быть задано двенадцать (по количеству положений ЗТС) ограничений тормозной силы электровоза в соответствии с различными условиями сцепления.
В режиме подготовительного торможения, когда тормозная рукоятка контроллера машиниста установлена в положение ПТ, задатчик тормозной силы отключен контактом контроллера. Напряжение от обмотки Н1—К1 трансформатора ТР-2 блока БП-2 через делитель напряжения, состоящий из резисторов R23, R24, подается выпрямительному мосту Д23-Д26. Выпрямленное напряжение моста, являющееся задающим напряжением, прикладывается к резистору R56. В дальнейшем работа схемы происходит аналогично работе схемы по ограничению тормозной силы по условию сцепления. Так как напряжение на резисторе R56 оказывается незначительным, то и ограничение тормозной силы получается около 10 тс.
Стабилизация скорости движения электровоза на спуске
Выходная мощность тахогенератора весьма мала. Для повышения уровня напряжения и мощности сигнала, пропорционального действительной скорости движения электровоза, предназначен усилитель на транзисторе Т5 блока БСС.
Управляющая цепь транзистора Т5 следующая: провод А26, клемма b2 штепсельного соединения, часть резистора R39, часть резистора R55, резистор R40, переход эмиттер—база транзистора Т5, клемма а2 штепсельного соединения, провод А25. В этой цепи переменный резистор R39 служит для компенсации разброса характеристик транзисторов Т5. Резистор R55 предназначен для компенсации износа бандажей в процессе эксплуатации электро воза. Конденсатор С15 фильтрует напряжение входа блока БСС (клеммы а2, b2).
Нагрузочный контур транзистора Т5 образуется обмоткой Н2—К2 трансформатора ТР-2 блока БП-2, выпрямительным мостом Д34-Д37 блока БСС, резисторами R38, R39, R55, R40, цепью эмиттер-коллектор транзистора Т5. На этих резисторах выде ляется сигнал, усиленный по напряжению и мощности по сравнению с напряжением и мощностью тахогенератора и пропорциональный действительной скорости движения электровоза. Напряжение на четырех последовательно включенных резисторах является запирающим для транзистора Т4, так как положительный потенциал этого напряжения прикладывается к базе транзистора Т4. Образуется следующая запирающая цепь: «плюс» выпрямительного моста Д34-Д37, резистор R37, переход база—эмиттер транзистора Т4, часть резистора R36, резистор R35, переход эмиттер—коллектор транзистора Т4, «минус» выпрямительного моста Д34-Д37.
Переменное напряжение, пропорциональное заданной скорости движения, подается на вход блока БСС (клеммы а3, b3, с2). В блоке БСС это напряжение выпрямляется диодами Д42-Д45, если оно приходит от сельсина-датчика первой секции, или диодами Д44-Д47, если оно приходит от сельсина-датчика второй секции электровоза. Выпрямленное напряжение мостов, пропорциональное заданной скорости движения электровоза, фильтруется конденсатором С16. Образуется следующая управляющая цепь транзистора Т4: «плюс» выпрямительных мостов Д42-Д47, резистор R36, переход эмиттер—база транзистора Т4, пять последовательно включенных резисторов R37, R38, R39, R55, R40, «минус» выпрямительных мостов Д42-Д47.
Если напряжение, пропорциональное действительной скорости движения, больше напряжения, пропорционального заданной скорости движения электровоза, то транзистор Т4 оказывается закрытым. Если, наоборот, первое напряжение окажется меньше второго, то этот транзистор открывается. Образуется следующий контур для протекания тока нагрузки транзистора Т4. Обмотка а7—b7 трансформатора ТР-2 блока БП-2, выпрямительный мост Д38-Д41 блока БСС часть резистора R32, резистор R54, обмотка управления 5Н—5 К магнитного усилителя ТУМ-1 блока ФР-УИ, часть резистора R36, цепь эмиттер—коллектор транзистора Т4.
Несмотря на действие других обмоток управления магнитного усилителя ТУМ-1 наличие тока в обмотке управления 5Н—5R преобразуется и усиливается в сигнал на закрытие тиристоров выпрямительных установок возбуждения 60. По обмоткам возбуждения тяговых двигателей и, следовательно, по тормозным резисторам не протекает ток. Электрического торможения не возникает. Наоборот, отсутствие тока в обмотке управления 5Н—5R обусловливает наличие электрического торможения электровоза.
Таким образом, если действительная скорость больше заданной скорости движения электровоза, то начинается электрическое торможение, а затем снижение скорости движения. Если наоборот действительная скорость меньше заданной скорости движения электровоза, то не возникает электрического торможения. Электровоз начинает увеличивать скорость движения на спуске за счет своей потенциальной энергии.