Система автоматического управления выправкой пути в продольном профиле и по уровню
Системы автоматического управления выправкой положения пути в продольном профиле одинаковы для машин ВПР-1200 и ВПРС-500 и имеют трехточечную схему измерения (см. п 9).
Выправочная система в продольном профиле имеет две идентичные измерительные системы, расположенные над обеими нитями железнодорожного пути. Каждая система включает в себя три измерительные тележки: переднюю, измерительную и контрольно-измерительную, которые одновременно используются в рихтовочной системе. На рамы тележек опираются штанги. Между штангами, расположенными на передней и контрольно-измерительной тележках, на определенной высоте от рельсовой нити натянут стальной трос-хорда (нивелировочный трос).

Рис. 142. Датчик высоты:
1— штепсельный разъем, 2— потенциометр, 3 — муфта, 4-шкив; 5 — корпус; 6 — походок, 7 — трос; 8 — пружина
Механизм натяжения нивелировочного троса находится на контрольноизмерительной тележке. Передний конец нивелировочного троса имеет возможность перемещаться по высоте. Это перемещение измеряется датчиком высоты троса (рис. 142). Принцип работы этого датчика аналогичен принципу действия датчика стрел изгиба пути. В датчике высоты вместо вилки применяется поводок 6, который связан со штангой нивелировочного устройства.
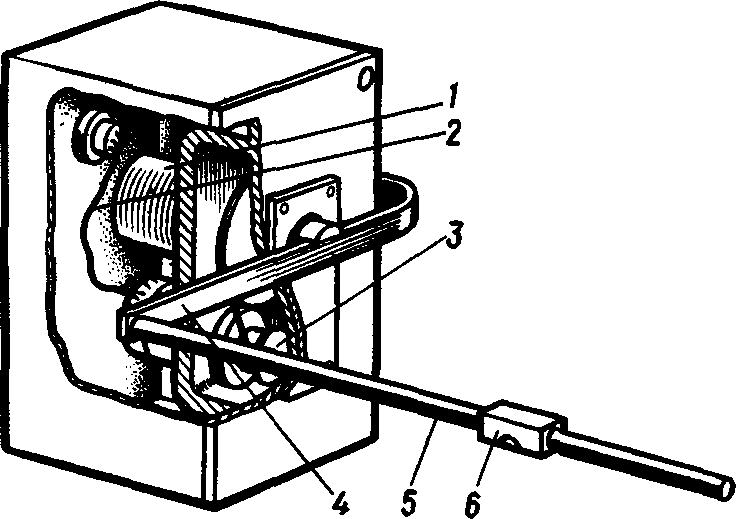
Рис 143. Пропорциональный датчик высоты
Измерение перемещений нивелировочного троса по вертикали осуществляется на измерительной тележке, которая расположена в середине и находится в зоне подбивки пути. На этой тележке находится пропорциональный датчик высоты (рис. 143), который предназначен для измерения отклонения пути по вертикали от заданного положения. На плите 2 закреплен прецизионный потенциометр 1, который через муфту соединен с малым шкивом 3. Малый шкив тросиком связан с большим шкивом, с валом которого соединена рейка 4 с закрепленной на ней штангой 5.

Рис 144 Маятниковый датчик
Отклонение штанг, опирающихся на тележки нивелировочного устройства, вызывает перемещение тросика, который, проходя через поводок 6, перемещает также штангу 5. Штанга приводит во вращение большой шкив, который поворачивает малый шкив, а он, в свою очередь,— прецизионный потенциометр. Последний электрически связан с потенциометром датчика высоты нивелировочного троса. На выходе этих потенциометров изменяется напряжение, поступающее в блок управления выправкой. В результате подъемно-рихтовочный агрегат будет поднимать путь до тех пор, пока потенциометр 1 пропорционального датчика высоты не вернется в прежнее положение.
Перемещение передних концов нивелировочных тросов по вертикали предусмотрено, во-первых, для задания требуемой подъемки пути и, во-вторых, для подстройки их в требуемое взаимное положение по уровню.
Выправка пути в продольном профиле производится одновременно по двум рельсовым нитям. При этом внутренняя рельсовая нить выбирается за базовую. Для выправочной системы, расположенной над этой нитью, задается требуемая подъемка пути, а вторая выправочная система подстраивается в заданное положение по уровню. Таким образом, установка пути по уровню в требуемое положение осуществляется за счет подстройки передних концов нивелировочных тросов выправочных систем по уровню в заданное положение, и выправочные системы, в свою очередь, выправляют путь в продольном профиле по обеим рельсовым нитям.
Измерение взаимного положения передних концов нивелировочных тросов по уровню осуществляется прецизионным маятниковым датчиком (рис. 144). Датчик смонтирован в герметичном корпусе. На лицевой части корпуса имеется панель со шкалой, отградуированной в миллиметрах возвышения железнодорожного пути по уровню, и стрелка, которая связана с подвижной частью маятника. Подвижная часть 1 маятника в виде металлического груза подвешена на оси 2, которая жестко связана с грузом и вращается в подшипниках, опирающихся на корпус. На оси закреплен большой блок 3, который посредством стального тросика 4 связан с малым блоком 5, закрепленным на вращающейся в подшипниках оси 6.

Рис. 145. Маятниковый мост
Ось малого блока посредством муфты 7 связана с валом прецизионного потенциометра 8, закрепленного на корпусе маятникового датчика. Контактные клеммы прецизионного потенциометра выведены на штепсельный разъем. При отклонении корпуса маятникового датчика груз 1 через ось 2 заставляет поворачиваться большой 3 и малый 5 блоки. Вращение малого блока через муфту 7 передается валу прецизионного потенциометра 8. Описанный маятниковый датчик является контактным, так как в качестве чувствительного элемента использован потенциометр.
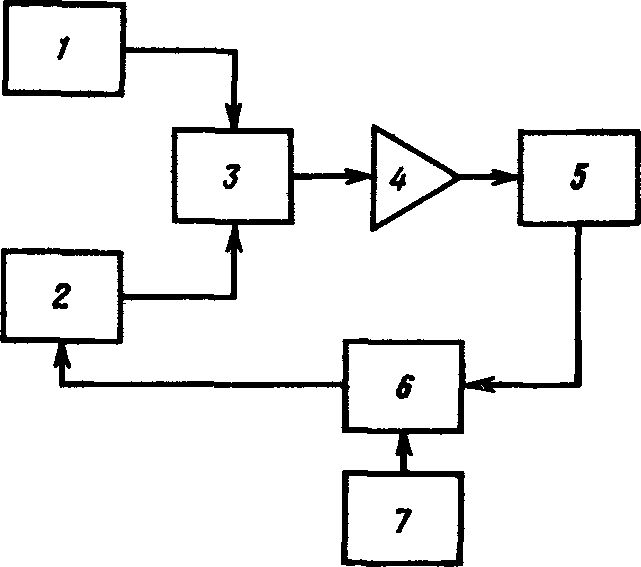
Рис. 146. Блок-схема системы управления перемещением нивелировочных тросов
С ползунка потенциометра, который включен в мостовую измерительную схему, снимается электрический сигнал, пропорциональный углу наклона корпуса маятникового датчика.
Маятниковый датчик 6 (рис. 145), измеряющий перемещение передних концов нивелировочных тросов по уровню, установлен на коромысле 5 маятникового моста. Коромысло шарнирно связано с пинолями 3, имеющими электромеханические приводы 4, которые дают им возможность перемещаться вверх и вниз относительно штанг 1. Штанги 1 через траверсы 2 опираются на раму измерительной тележки. Через пиноли проходят передние концы нивелировочных тросов.
Блок-схема системы управления перемещением передних концов нивелировочных тросов (рис. 146) состоит из: задатчика превышения 1, с помощью которого задается требуемое возвышение по уровню; маятникового датчика уровня 2, контролирующего заданный уровень; измерительной мостовой электрической схемы 3, в одну диагональ которой подается опорное напряжение постоянного тока, а с другой диагонали снимается электрический сигнал рассогласования (плечами мостовой измерительной схемы являются чувствительные элементы задатчика величины превышения и маятника); электронного усилителя 4; электромеханического привода 5; маятникового моста 6, на котором закрепляется маятник; измерительной тележки 7. Задатчик превышения представляет собой многооборотный прецизионный потенциометр с цифровой ручкой управления. Чувствительным элементом маятникового датчика также является прецизионный потенциометр.
Принцип работы системы автоматического управления перемещением передних концов нивелировочных тросов можно проследить по упрощенной электрической схеме (рис. 147). Изменение уровня пути под передней тележкой воспринимается маятниковым датчиком, что влечет за собой появление сигнала рассогласования в диагонали мостовой электрической схемы, образованной резисторами R4 и R6, потенциометром R5 маятникового датчика, резисторами R7 и R9, потенциометром R8 задатчика превышения. Электрический сигнал рассогласования усиливается электронным усилителем, на выходе которого включены промежуточные чувствительные реле К2 и К3.
Последовательно обмоткам реле включены полупроводниковые диоды V3 и V4, определяющие включение того или иного реле в зависимости от полярности выходного сигнала усилителя. Нормально разомкнутые контакты реле К2 и К3 коммутируют цепи обмоток промежуточных реле К3, К6 и реле времени К4, время срабатывания которого регулируется в пределах от 0,2 до 10 с и устанавливается опытным путем во время настройки системы. Введение реле времени в схему коммутации реле К5 и К6 позволяет избежать ложных срабатываний промежуточных реле при кратковременных сигналах рассогласования в измерительной цепи.
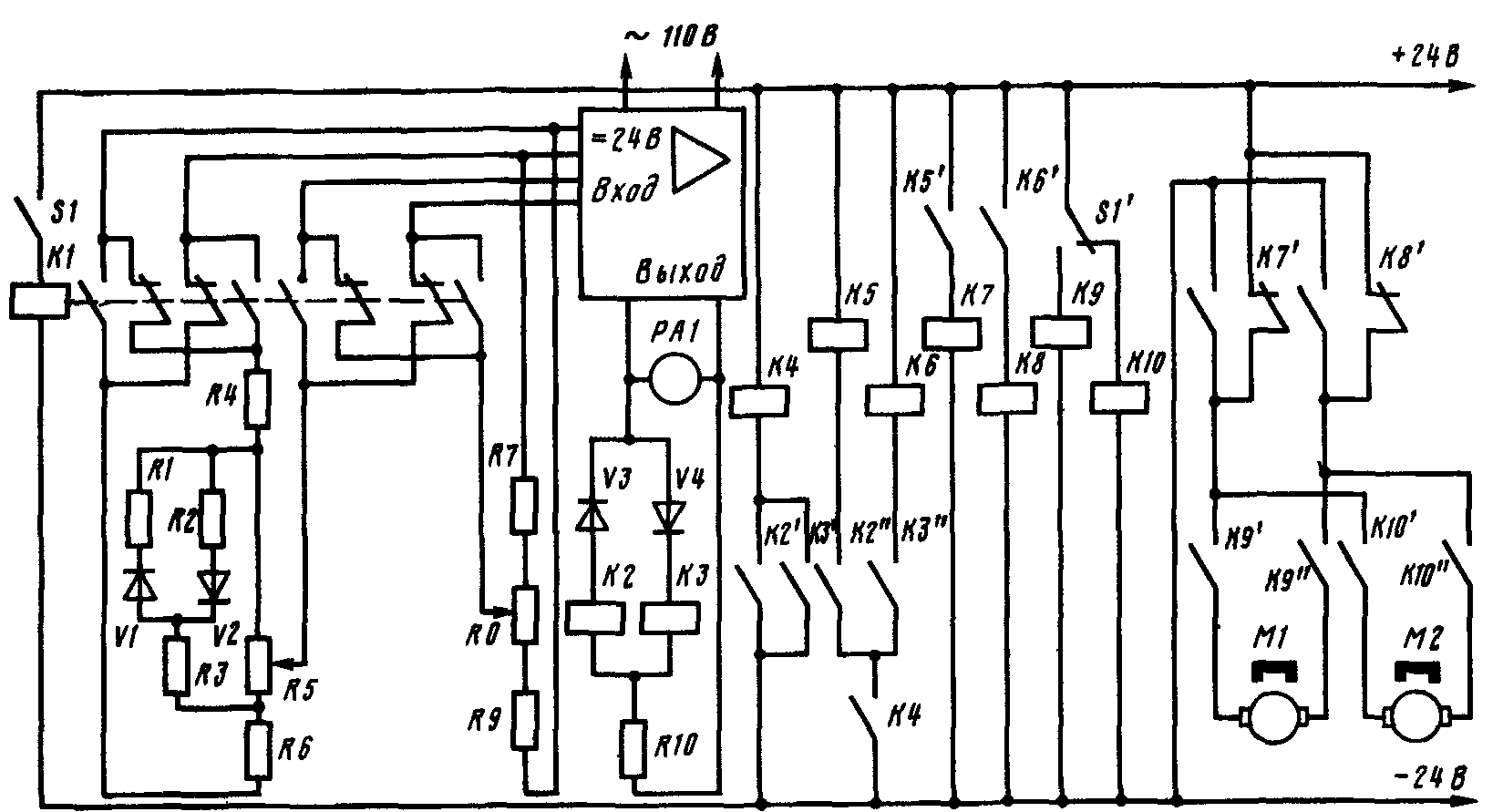
Рис. 147. Электрическая схема системы управления перемещением нивелировочных тросов
Промежуточные реле К5 и К6 коммутируют обмотки силовых реле К7 и К8, определяющих вращение одного из электродвигателей M1 и М2 в ту или иную сторону. Вращаясь, электродвигатель перемещает пиноль (см. рис. 145) до тех пор, пока конец троса, проходящий через штангу пиноли, не займет положение, соответствующее первоначально заданному. При достижении этого положения исчезает сигнал рассогласования, все реле обесточиваются, и электродвигатель останавливается.
Система автоматического управления перемещением передних концов нивелировочных тросов выполнена таким образом, что имеется возможность управлять перемещением одного или другого троса, что в свою очередь зависит от того, какая из нивелировочных систем выбрана за базовую, а какая должна подстраиваться под базовую. Для обеспечения этого в электрическую схему (см. рис. 147) введены реле Κ1, К9 и К10, включающиеся переключателем S1, установленным на блоке управления нивелировочными тросами. Реле К1 коммутирует цепи питания потенциометра R5 маятникового датчика и входные цепи усилителя. Реле К9 и К10 определяют подготовку к работе двигателей M1 и М2.
Электрооборудование системы автоматического управления выправкой пути в продольном профиле и по уровню размещено в блоке управления подъемкой (рис. 148) кабины машиниста, а также в блоке управления рихтовочной хорды (см. рис. 140) и в блоке управления нивелировочными тросами (рис. 149).
Включение системы выправки пути в продольном профиле осуществляется переводом переключателя (см. рис. 148) из нулевого положения в положение «Быстрый подъем» или «Медленный подъем». Управление подъемом пути в процессе рабочего цикла (включение и выключение сервовентилей подъема) осуществляется автоматически конечными выключателями подбивочных агрегатов и с помощью нивелировочной измерительной системы.
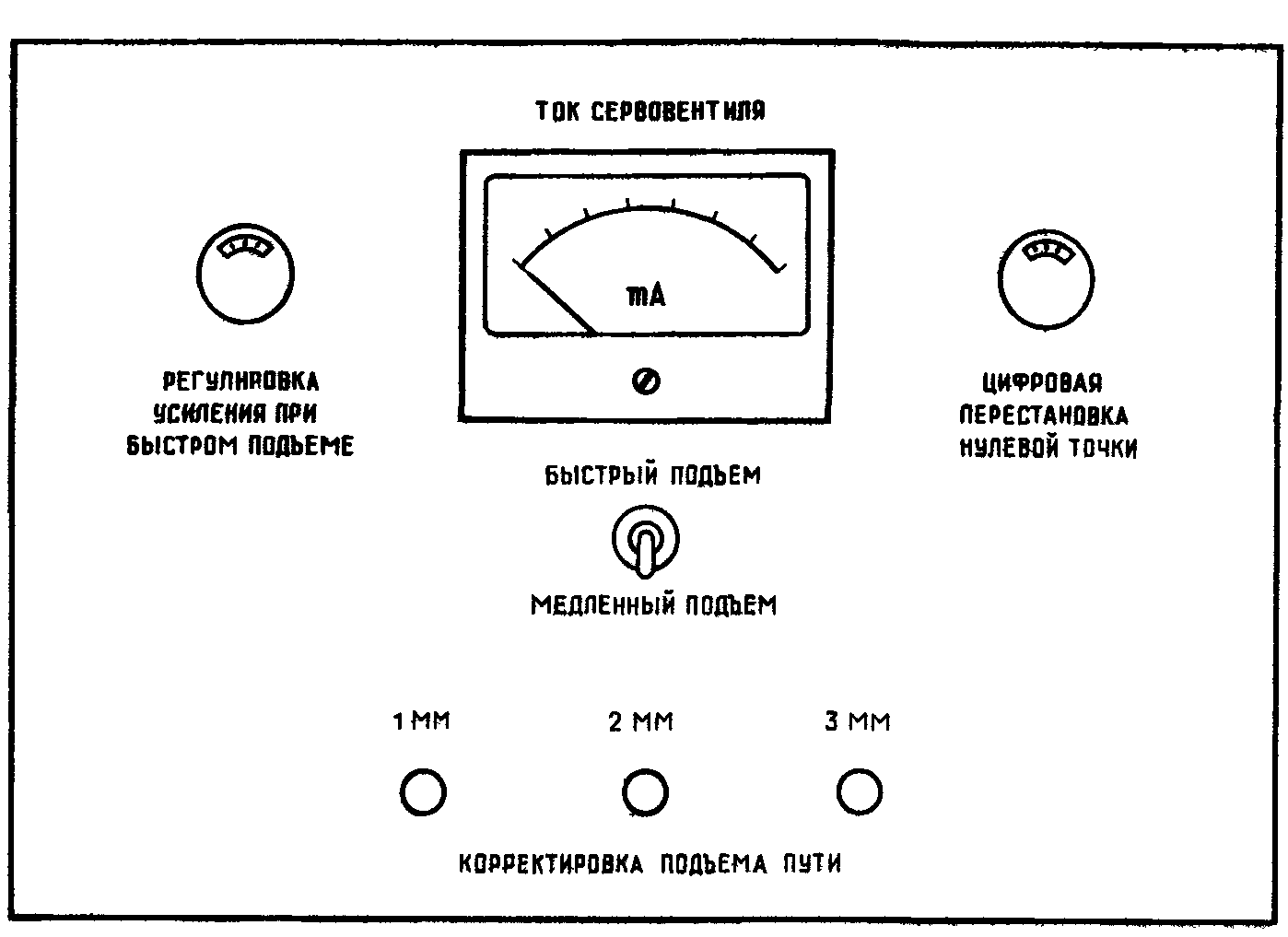
Рис 148 Блок управления подъемкой

Рис 149 Блок управления нивелировочными тросами
В положении переключателя «Медленный подъем» включение сервовентилей подъема происходит, как только подбивочные агрегаты, опускаясь, достигнут середины, в результате чего процессы подъема пути и подбивки совпадают по времени. Подъем пути происходит до уровня, определяемого положением нивелировочных тросов.
При необходимости можно произвести корректировку положения нулевых точек нивелировочных тросов, т. е. произвести подъем на фиксированную величину левого или правого рельсов в положение, отличное от уровня, определяемого тросами. Корректировку выправки можно осуществить кнопками и потенциометром со шкалой на ручке. Кнопками пользуются в процессе выправки, а потенциометром — между рабочими циклами.
При работе машины на тяжелом верхнем строении пути с целью рационального использования мощности силовой установки и исключения ее перегрузки процессы подъема и обжатия балласта сдвигают по времени. Для этого переключатель устанавливают в положение «Быстрый подъем». В этом положении переключателя включение сервовентилей подъема происходит одновременно с опусканием подбивочных агрегатов, и процесс подъема пути начинается раньше заглубления подбоек, а заканчивается при достижении подбивочными агрегатами середины подъема.
Перемещение передних концов нивелировочных тросов по вертикали вверх и вниз при ручном управлении осуществляется кнопками (см. рис. 149). В процессе работы величину подъемки пути задают потенциометром, имеющим шкалу, отградуированную в миллиметрах подъемки пути.
Система позволяет управлять выправкой как по методу сглаживания, так и по методу фиксированных точек путем корректировки по высоте положения передних концов нивелировочных тросов на величину, предварительно записанную на шпале. Корректировка (перемещение тросов) осуществляется машинистом из кабины оператора. Машинист управляет перемещением троса, расположенного над базовым рельсом. При этом для всех методов работы противоположный трос будет автоматически устанавливаться на уровне троса базового рельса, если машина работает на прямом участке пути.