Глава 6. КОНСТРУКТИВНО-ТЕХНОЛОГИЧЕСКИЕ МЕРОПРИЯТИЯ ПО УЛУЧШЕНИЮ ВЗАИМОДЕЙСТВИЯ ПУТИ И ПОДВИЖНОГО СОСТАВА
- Лабораторные испытания вертикальной и продольной динамики системы «путь—подвижной состав» на катковом стенде
Для проведения комплекса лабораторных испытании по оценке оптимального демпфирования пути был использован катковый стенд, представленный на рис. 6.1.
Испытательный стенд представляет собой раму 2, изготовленную из швеллеров, на которой смонтированы двигатель постоянного тока 3 и подшипниковые опоры 4. На консолях валов опорных катков 5 расположены конические редукторы, соединенные посредством карданных валов с электродвигателем 3. На опорные катки 5 стенда устанавливается модель экипажа. Регулировка положения колес модели относительно опорных катков стенда осуществляется винтами 6, установленными в опорах.
Создание новых конструкций пути и подвижного состава требует большего объема ходовых испытаний, в процессе которых проверяется работоспособность и надежность ряда новых узлов и деталей.
Для ускорения процесса обработки новых конструкций узлов целесообразно часть сравнительных испытаний проводить на моделях экипажа на стенде, моделирующем железнодорожный путь и его воздействие на ходовую часть подвижного состава.
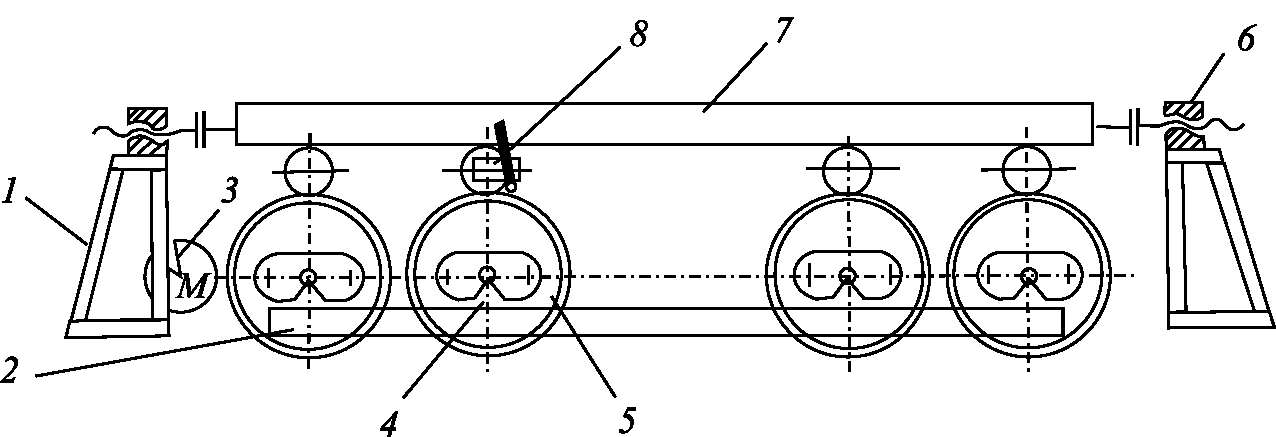
Рис. 6.1. Схема испытательного стенда
Исследование на моделях имеют следующие преимущества:
- Использование стенда и модели экипажа при испытаниях новых конструкций узлов ходовой части позволит значительно сократить время ходовых испытании натуральных опытных образцов;
- Отпадает надобность в изготовлении ряда натурных опытных образцов узлов ходовой части, так как можно будет испытывать модели этих узлов;
- Сокращается время проектирования ходовой части за счет более оперативной проверки работоспособности новых узлов на стенде;
- Улучшается качество проектирования, так как становится возможным провести сравнительные испытания большего числа вариантов новых узлов на стенде, чем при ходовых испытаниях натурных узлов.
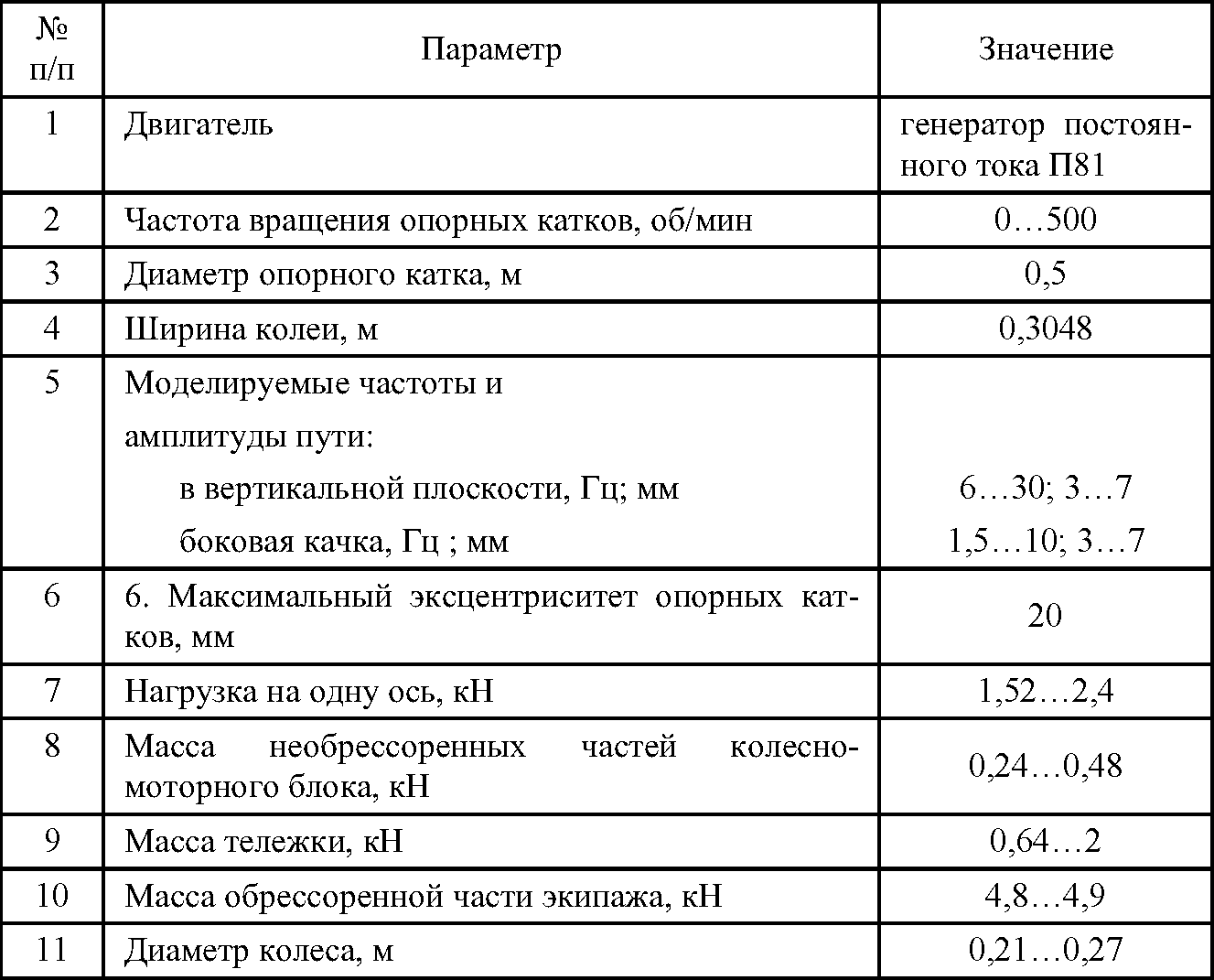
Технические характеристики испытательного стенда представлены в табл. 6.1.
Для исследования влияния жесткости и демпфирования на динамическое поведение системы под подшипниковые опоры 4 и редуктора устанавливались модели шпал с различной степенью демпфирования.
Экспериментальное определение параметров, реализуемых на стенде при перекатывании модели колеса по модели ВСП, производилось при помощи вибродатчиков Д14.
Регистрация сигналов с вибродатчиков осуществлялась при помощи цифрового запоминающего осциллографа фирмы «VELLEMAN».
Цифровой запоминающий осциллограф PCS541 использует в качестве дисплея IBM-совместимый компьютер. Все стандартные функции осциллографа выполняются в DOS и Windows. Преимущество цифрового осциллографа заключается в том, что сигнал «замораживается» и может быть впоследствии проанализирован и сравнен с другими сигналами.
При помощи осциллографа может быть точно измерена только основная частота сигнала, уровни остальных частот сложно измерить и одновременно сравнить. Поскольку входной сигнал оцифрован, при помощи спектроанализатора его можно аналитически преобразовывать в частотный спектр (используя быстрое преобразование Фурье). При помощи специальных программ спектроанализатора можно наблюдать и исследовать частотный спектр сигнала.
Таблица 6.1
Технические характеристики каткового стенда
Постановка опыта и обработка его результатов проводилась на основе метода математического планирования эксперимента. Назначение метода планирования эксперимента—при минимальном количестве опытов и вариации значений независимых переменных (факторов—х) по специально сформулированным правилам получить математическую модель изучаемого процесса —у, а затем найти область оптимума для переменных (факторов).
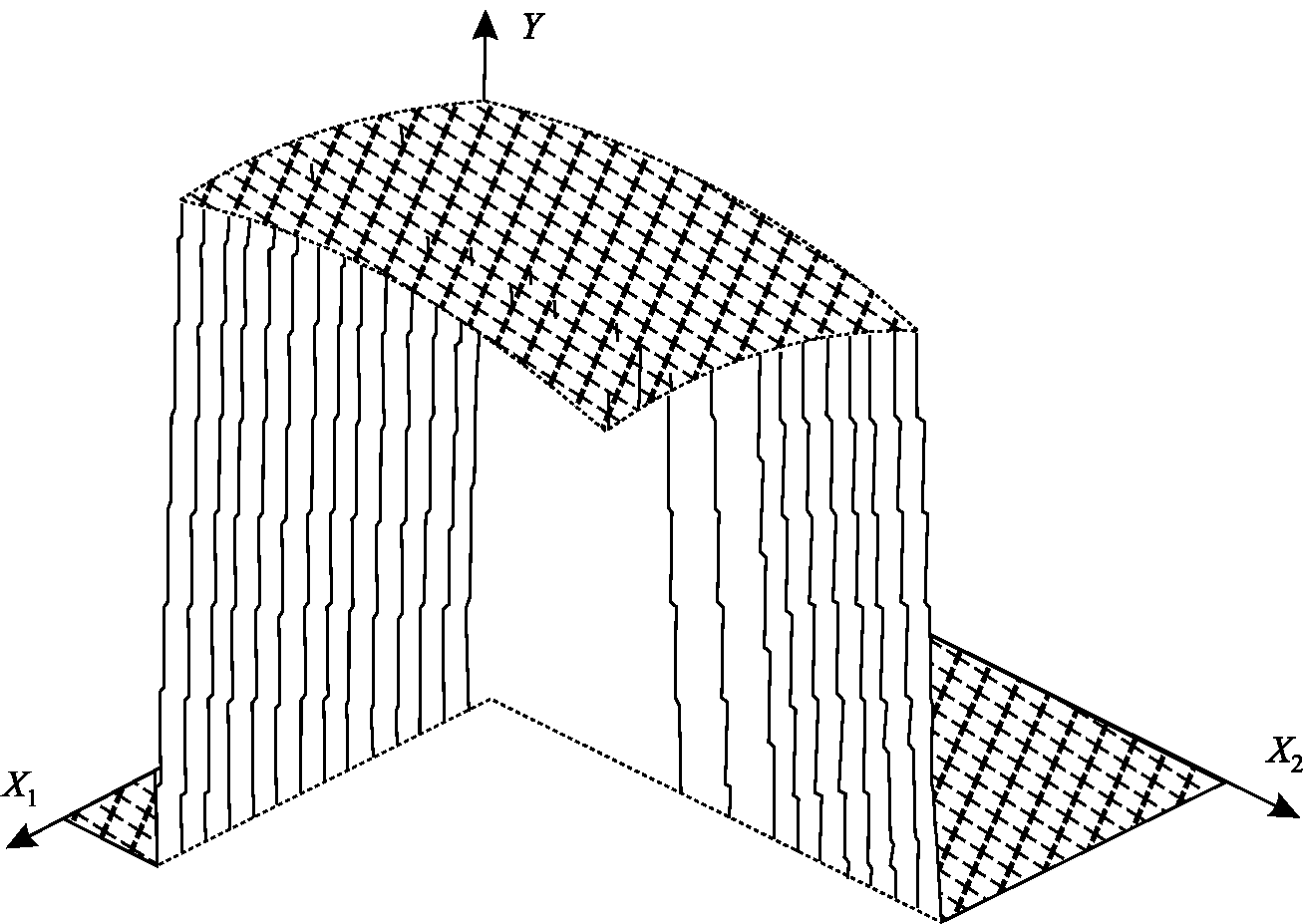
Рис. 6.2. Геометрическая модель уравнения регрессии
При исследовании применялся центральный ортогональный композиционный план (ОЦКП) второго порядка, положительные свойства которого заключаются в том, что его реализация позволяет получать оценки коэффициентов уравнения регрессии независимо друг от друга и отсеивать факторы с незначимыми коэффициентами.
С помощью программы MathCad была построена геометрическая модель уравнения регрессии (поверхность отклика Кд (коэффициента динамики) при факторах скорости и демпфирования, рис. 6.2).