Глава X
ПРИВОДЫ ВЫСОКОВОЛЬТНЫХ ВЫКЛЮЧАТЕЛЕЙ
§ 37. Общие сведения
Приводом к высоковольтному выключателю называется отдельный или встроенный в высоковольтный выключатель механизм, предназначенный для включения выключателя, для удержания его во включенном положении и для его отключения. Приводы могут быть ручными и дистанционными. В ручных приводах работа по включению выполняется мускульной силой оператора, а в дистанционных приводах энергия поступает от постороннего источника.
Энергия при включении выключателя затрачивается на растяжение или сжатие отключающих и контактных пружин, на обеспечение движущемуся контакту определенной скорости движения и на преодоление трения.
Если общую работу включения обозначить через А, то средняя мощность привода за время включения t будет![]() Приводы, применяемые в эксплуатации, должны обеспечить включение выключателей с достаточно малым временем (табл. 37-1). Поэтому в приводах прямого действия с жесткой кинематической связью между приводом и выключателем мощность привода должна быть достаточно велика.
Приводы, применяемые в эксплуатации, должны обеспечить включение выключателей с достаточно малым временем (табл. 37-1). Поэтому в приводах прямого действия с жесткой кинематической связью между приводом и выключателем мощность привода должна быть достаточно велика.
Таблица 37-1
Предельные значения скорости включения и отключения выключателей
Тип | Время, сек | Наименьшая скорость при отключении в момент размыкания контакта, м/сек | |||
включения | отключения | от момента поступления импульса тока в соленоид | |||
до остановки подвижных контактов | до замыкания контакта | до размыкания контакта | |||
ВМГ-133 | 0,22 | 0,18 | 0,20 | 0,10 | 1,5-1,7 |
Если же энергию включения предварительно накопить в течение большего времени (в виде потенциальной энергии растяжения или сжатия пружин, поднятия груза и т. п.), то в таких приводах косвенного действия мощность включающих устройств удается значительно снизить.
Приводы прямого действия бывают ручные, соленоидные (электромагнитные) и электродвигательные.
Приводы косвенного действия бывают пружинные, грузовые (с ручным или электродвигательным заводом) и пневматические.
Применение ручных приводов ограничивается мускульной силой человека. Мощность человеческих мускулов составляет около 85 Вт, кратковременная перегрузка может достигать десятикратной величины. Интересно отметить, что предельная физическая работа человека в течение суток не превышает 0,6—0,7 КВт-ч.
Во всех современных приводах кинематическая связь механизма выключателя с приводом осуществляется не жестко, а с помощью защелок и рычагов, обеспечивающих возможность автоматического отключения выключателя независимо от положения привода. Иначе говоря, в момент автоматического отключения привод может продолжать движение на «Включение» или оставаться в положении «Включено». Такие приводы называются приводами со свободным расцеплением.
§ 38. Ручные приводы
Ручные автоматические приводы могут применяться для выключателей на напряжение до 35 кВ в тех случаях, когда наибольшее мгновенное значение токов к. з. в месте установки не превышает 30 кА.
Ручные приводы к высоковольтным выключателям могут быть штурвальные или рычажные.
Для современных выключателей типа ВМГ-133 и ВМП-10 выпускаются ручные автоматические приводы типа ПРБА (привод рычажный бленкерный автоматический) и типа ПРА. В приводе ПРБА (рис. 38-1, а) включение выключателя производится поворотом рычага 3 из нижнего положения в верхнее. Отключение может быть автоматическим (от защиты) или вручную. При автоматическом отключении благодаря свободному расцеплению рычаг 3 остается в верхнем положении, а бленкер 4 занимает горизонтальное положение, показывая несоответствие рычага управления положению выключателя. Для опускания бленкера в нормальное (нижнее) положение рычаг управления вручную переводится в положение «Отключено».
Механизм привода изображен на рис. 38-1, б, в, г. В отключенном положении конец защелки 13 удерживается полуосью 12 коленчатого рычага 11. Последний в свою очередь удерживается от поворота концом отключающей планки 8. При повороте рычага управления 3 против часовой стрелки вокруг неподвижной оси 17 серьга 18 будет поворачивать главный рычаг 16 вокруг
той же оси. В результате тяга 10 произведет включение выключателя.
После включения рычаг управления останется неподвижным вследствие того, что ось 20 серьги останавливается в мертвом положении (см. рис. 38-1,б).
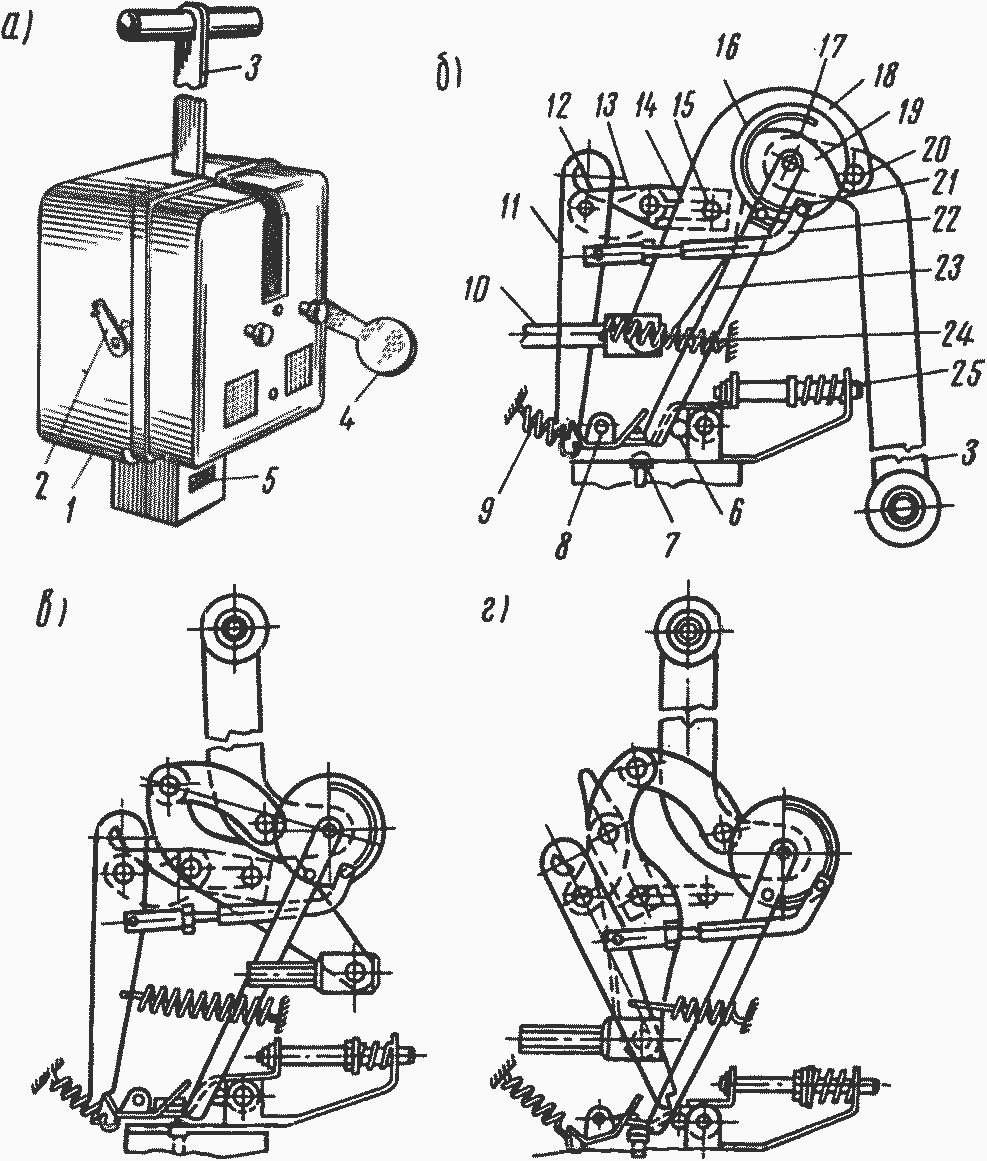
Рис. 38-1. Общий вид и кинематическая схема привода ПРБА:
а — общий вид; б — привод готов к включению; в — включенное положение; г — привод отключен автоматически: 1 — корпус; 2 — рычаг для присоединения блок-контактов; 3 — рычаг управления; 4 — указатель (бленкер) автоматического отключения; 5 — релейная коробка; 6 — упор; 7 — ударник; 8 — отключающая планка; 9 — пружина отключающей планки; 10 — тяга к выключателю; 11 — рычаг; 12 — полуось; 13 — защелка; 14 — щель; 15 — штифт; 18 — главный рычаг; 17 — ось рычага управления; 18 — серьга; 19 — диск; 20 — ось; 21 — регулировочный винт фрикционной пружины; 22 — тяга; 23 — рычаг; 24 — пружина; 25 — кнопка возврата
При автоматическом отключении планка 8 освобождает конец коленчатого рычага 11. Поворачиваясь под действием пружины 24, рычаг освобождает конец защелки 13, которая поворотом по часовой стрелке перемещает штифт 15 в пазу. Поскольку штифт 15 рычага 16 переместился, то тяга 10 также перемещается и отключает выключатель (см. рис. 38-1, в).
Для того чтобы привод поставить в нормальное отключенное положение (см. рис. 38-1,б), рычаг управления 3 поворачивают вниз. При этом заводная тяга 22 поворачивает коленчатый рычаг 11, защелка 13 заводится за конец полуоси 12, а нижний конец коленчатого рычага 11 защелкивается планкой 8.
При ручном отключении рычаг управления 3 поворачивают вниз. Вместе с рычагом благодаря фрикционному сцеплению поворачивается на небольшой угол отключающий рычаг 23, который поворачивает своим концом планку 8. Далее механизм свободного расцепления, состоящий из системы рычагов, действует аналогично описанному. Релейная коробка привода ПРБА может содержать в различной комбинации следующие аппараты отключения: реле максимального тока РТМ (обозначается цифрой 1); реле токовое с выдержкой времени РТВ (цифра 2); реле минимального напряжения PH (цифра 3); электромагнит отключения от постороннего источника тока (цифра 4), электромагнит отключения от трансформатора типа ТКБ-1 (цифра 5). Всего в релейной коробке привода могут быть установлены три аппарата из перечисленных. Например, привод ПРБА-114 имеет два реле РТМ и электромагнит отключения.
Привод ПРБА применим лишь для таких условий, когда усилие на рычаге не более 20 кГ. Этим условиям удовлетворяют наиболее распространенные выключатели типов ВМГ-133 и ВМП-10. Привод типа ПРБА — недорогой и надежно действующий аппарат, однако его применение ограничивается тяговыми подстанциями ручного управления.
Ручной привод ПРА снабжен штурвалом и применяется к выключателям при угле поворота вала не более 105° и при работе включения в пределах 20 кГ-м. Этим условиям удовлетворяет, в частности, выключатель типа ВМП-10.
§ 39. Электромагнитные приводы
К выключателю типа ВМГ-133 выпускался ранее электромагнитный привод типа ПС-10, который в настоящее время заменен более совершенным приводом ПЭ-11 (рис. 39-1).
Электромагнит включения привода состоит из стальных плит 3, 7, цилиндра 5, обмотки 4 и сердечника 1. К сердечнику стопором 2 крепится шток 6. Для смягчения удара сердечника имеются демпферная пружина и латунная шайба 17.
При включении выключателя шток упирается в ролик 13 и через серьгу 11 и рычаг 21 поворачивает вал выключателя 22. При подъеме ролика 13 последний поднимается и удерживается
на защелке 14. Серьга 23 поворачивает рычаг 26, его ролик 27 заходит на защелку 28.
Отключение привода происходит при повороте защелки 28 на оси 31. Это может быть сделано рукояткой 30 или бойком 32 электромагнита отключения.

Рис. 39-1. Разрез электромагнитного привода типа ПЭ-11
Ролик 27 скатывается с защелки и освобождает рычаг 26, который поворачивается на своей оси 20 и через серьгу 23 освобождает ролик 13. Ролик 13 скатывается с защелки 14 и под действием своих пружин выключатель отключается.
Возвратные пружины 15, 16, 19 и 29 устанавливают механизм привода в исходное положение. Винт 18 служит для регулирования глубины зацепления ролика 27 с защелкой 28.
Блок-контакты 9, 12, 25 приводятся в движение тягами 8, 10, 24, связанными с валом привода 22. Цепи управления подводятся к клеммнику 33.
Отдельные этапы работы привода изображены на рис. 39-2.
Привод ПЭ-11 по отношению к приводу ПС-10 обладает более простой и надежной кинематической системой, кроме того, мощность электромагнита включения здесь снижена вдвое.
Блокировка от многократного включения в приводе ПЭ-11 осуществлена на отключающем электромагните, питающемся от оперативного постоянного тока.
При переходе на оперативный переменный ток электромагнит отключения замещается отключающими приставками.

Рис. 39-2. Схема этапов работы механизма привода ПЭ-11:
а — включенное положение выключателя; б — отключение выключателя от отключающего электромагнита; в — отключенное положение «выключателя; г — включение выключателя
Отключающая приставка к соленоидным приводам ПС-10 и ПЭ-11 типа ОП-6-4 разработана в Мосэнерго. Приставка позволяет уменьшить мощность электромагнита отключения и увеличить число электромагнитов до двух. Схема приставки изображена на рис. 39-3. После завода отключающая пружина 3 при помощи соленоида 2 и сердечника 4 с отключающимся бойком 5 удерживается при помощи рычага 6 с роликом. При воздействии на отключающую катушку 1 рычагом 7 каретка 8 откатывается вправо и под действием пружины 3 происходит отключение выключателя.
Электрическая схема включения привода ПЭ-11 с приставкой ОП-6-4 изображена на рис. 39-4.

Рис. 39-3. Схема приставки типа ОП-6-11 к соленоидному приводу ПЭ-11

Рис. 39-4. Принципиальная схема включения привода ПЭ-11 с приставкой:
В — вентили выпрямителя; АП — автомат; КВ, КО — кнопка включения и отключения масляного выключателя; К — контактор; ЭВ, ЭО — электромагниты включения и отключения привода; КЗ11 — катушка и конечный выключатель завода пружины приставки; МВ — блок-контакты выключателя; РЗ — контактное реле защиты; ЛВ, ЛО — сигнальные лампы