Системы управления и контроля за движением поездов на монорельсовых дорогах выбираются в зависимости от эксплуатационных условий конкретной рассматриваемой дороги и экономических расчетов, выполняемых с учетом следующих основных факторов: подлежащего освоению пассажиропотока; интервала движения поездов; предполагаемого времени стоянки на станциях; характеристик подвижного состава; трассы и устройства пути; расположения станций и расстояния между ними и т. п.
Реализуемые вагонами монорельсовых дорог высокие ускорения и замедления позволяют отказаться от стационарных устройств системы блокировки и резко снижают ограничения в отношении минимального расстояния между двумя движущимися поездами.
Телефонная связь между диспетчером и машинистом каждого состава на монорельсовом транспорте может осуществляться с помощью индукционной электромагнитной системы или радиоэлектрической связи высокой частоты с регулированием длины волн. Условия безопасности движения на монорельсовом транспорте, где поезда движутся с небольшими интервалами и с высокой скоростью, требуют, чтобы устройства сигнализации и блокировки были надежными. Способ сигнализации для монорельсового транспорта в основном аналогичен полуавтоматической блокировке на обычных железных дорогах. Самый простой способ сигнализации — это установка только выходных сигналов на остановках (сигналов отправления).
В зависимости от пропускной способности дороги и расстояний между остановками перегоны могут быть разбиты на блок-участки, каждый из которых должен ограничиваться сигналами в обоих направлениях.
В том случае, если на перегонах или станциях имеются стрелочные переводы, они также должны быть ограждены сигналами.
Нахождение вагона на пути можно фиксировать, учитывая число тележек на входе и выходе блок-участка. Так как вагоны монорельсовых дорог оборудованы пневматическими шинами, а путь представляет собой железобетонную или металлическую эстакаду, то количество тележек можно подсчитать с помощью светового луча или импульса тока, вызванного излучением изотопа, имеющегося в каждой тележке, или комбинированным способом. Пересечения световых лучей или импульсов тока суммируются в обычном электромагнитном счетчике. Когда счетчики входа и выхода зарегистрируют одинаковое количество прошедших тележек — участок свободен. Светофоры у стрелочных переводов регулирует диспетчер, который непрерывно получает сведения по световому табло о положении на линии, занятости участков пути и положении стрелочных переводов.
В кабине машиниста сигналы светофоров дублируются с помощью системы электромагнитной индукции на трех частотах: для сигналов свободного пути, замедления и остановки. Эта система с помощью устройств контроля скорости вызывает автоматическую остановку поезда перед сигналом запрещения, предупреждения и ограничения скорости (на кривых, подходах к станции и к стрелочным переводам и т. п.), если после прохождения предупреждающего сигнала машинист не приведет в действие тормоз в течение определенного промежутка времени и поезд не остановится перед запрещающим сигналом или подойдет с увеличенной скоростью к участку с ограничением (перед кривыми).
После остановки перед сигналом запрещения система блокировки допускает возобновление движения, если сигнализация покажет, что путь свободен.
При эксплуатации вагонов на пневматических шинах специальные требования предъявляются к системе обнаружения спущенных шин. На дорогах системы САФЕЖЕ использован опыт Парижского метрополитена и применены приспособления, состоящие из двух педалей, располагаемых через определенные промежутки на внутренней стороне поверхности качения ходовой балки. Колесо со спущенной шиной, проходя над соответствующей педалью, нажимает на нее диском безопасности и подает сигнал. Подобное же приспособление применено и для направляющих колес.
К устройствам, обеспечивающим безопасность эксплуатации монорельсового транспорта, относится также поездная и диспетчерская радиосвязь, осуществляемая по проводам и по радио на ультракоротких волнах непосредственно из кабины машиниста.
Для вынужденной высадки пассажиров подвижной состав снабжается лестницами, которые находятся под полом вагона на дорогах подвесного типа, или гибкими свертываемыми лестницами для подвижного состава навесного типа.
Ниже описываются некоторые системы автоматического управления поездами, реализованные на построенных монорельсовых дорогах.
На навесной монорельсовой дороге в Нагои (Япония), построенной в 1962 г. и находящейся с тех пор в регулярной эксплуатации, применена следующая система автоматического управления поездами. Система автоматического управления регулирует скорость движения поезда на перегоне в соответствии с заданной программой и управляет торможением при подходе его к остановкам. В последнем случае исключается возможность проезда конечных пунктов линии и сход поезда с несущей балки.
При питании линии постоянным током и наличии у вагонов сериесных тяговых двигателей скорость движения их регулируется переключением двигателей с тягового режима работы на выбег и тормозной режим. Данная система автоматического регулирования скорости разработана ранее для метрополитена Нагои. Для торможения применена система, которая обусловливает нарастание тормозной силы до некоторой определенной величины, зависящей от соотношения между фактической скоростью поезда и той скоростью, которая определена заранее и задается напольной системой посредством одиночных сигналов, поступающих в вагон в виде запрограммированной «шаблонной» кривой.
Система управления торможением автоматически учитывает все разнообразие меняющихся эксплуатационных условий, обусловленное различием кривых и уклонов на конечных станциях, а также колебанием фактического диаметра колес вследствие использования резиновых шин.
Вагоны снабжены двумя независимыми системами, для которых используется в основном однотипное оборудование: системой автоматической остановки поезда (АОП), предотвращающей превышение скорости им на перегоне между станциями и обеспечивающей точную остановку его на конечных пунктах, и системой автоматического управления поездом (АУП), воздействующей на режимы работы тяговых двигателей. Таким образом, если система АОП является по существу только системой безопасности, то система АУП выполняет более сложные функции. В отличие от системы АОП она воздействует на аппаратуру управления движением поезда, посылая команды для переключения тяговых двигателей с тягового режима на выбег и режим электрического торможения. При служебном торможении наряду с электрическим тормозом может быть включен пневматический, что позволяет менять величину замедления поезда.
При автоматическом управлении поездом машинист не производит никаких манипуляций за исключением нажатия пусковой кнопки. Вручную машинист может произвести также экстренное торможение поезда на перегоне между станциями при возникновении на пути какого-либо препятствия. После экстренной остановки пуск поезда производится также вручную, а затем вновь вступает в действие система АУП.
Использование двух независимых систем исключает ложное срабатывание аппаратуры и повышает безопасность движения. Принцип действия системы АОП поясняется схемами, показанными на рис. 98 и 99.
Вся линия протяженностью 1,4 км разбита на четыре секции от Т0 до Т3 (рис. 98). Вдоль линии по кабелю постоянно передаются сигналы, позволяющие определить, какую секцию поезд уже прошел. Действие системы АОП ограничено передачей команд на включение или выключение экстренного тормоза.
Движение поездов на перегоне под контролем системы АОП осуществляется следующим образом. Фактическая скорость движения поезда постоянно автоматически сравнивается с четырьмя установленными уровнями возможных скоростей от 23 до 32 км/ч (рис. 100), и в результате этого сравнения выдается одна из трех команд: тяга, выбег или электрическое торможение.
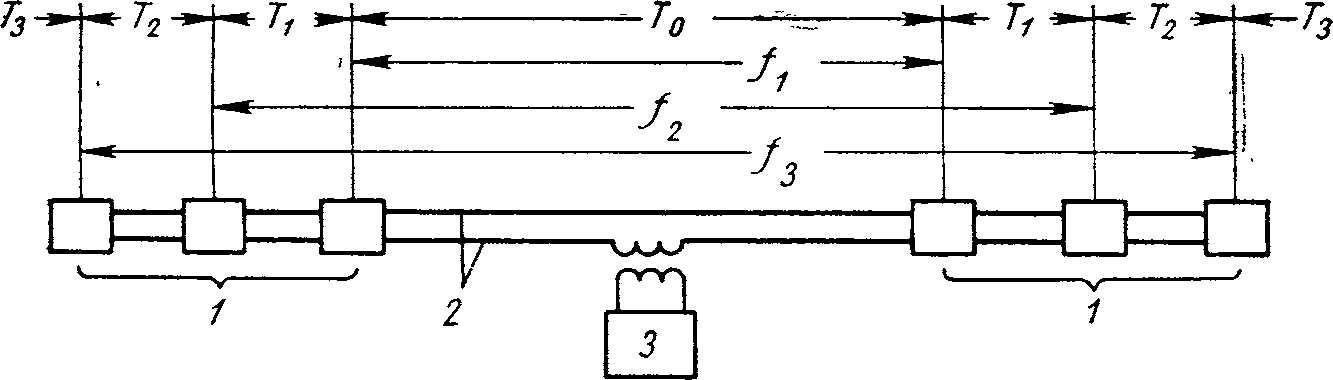
Рис. 98. Расположение оборудования системы автоматической остановки поезда вдоль трассы:
1 — линейные фильтры; 2 — индукционные кабели; 3 — трансмиттер
При пуске поезда подается команда на обеспечение режима тяги. Разгон поезда с ускорением (кривая 1, рис. 100, а) продолжается до достижения скорости 30 км/ч (точка 2), соответствующей отключению режима тяги. После этого поезд движется на выбеге (кривая 5) и скорость уменьшается до величины, соответствующей тому уровню, при котором автоматически подается команда на включение режима тяги.

Рис. 100. Принцип автоматического регулирования скорости на перегоне между станциями:
а — на горизонтальном участке; б — на уклоне
Путь
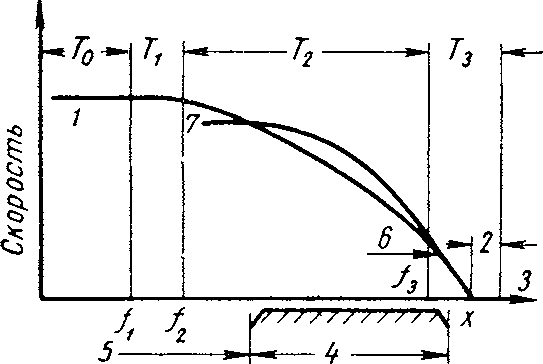
Рис. 99. Принцип действия системы автоматической остановки поезда:
1 — основная запрограммированная (шаблонная) кривая скорости; 2 — запас пути для обеспечения безопасности; 3 — конец пути; 4 — станция; 5 — перегон; 6 — подшаблонная кривая; 7 — фактическая кривая скорости движения поезда
С этого момента (точка 4) поезд будет вновь разгоняться (кривая 5) до достижения в точке 6 того уровня скорости (30 км/ч), при котором происходит отключение режима тяги, и снова поезд движется в режиме выбега (кривая 7). Этот цикл повторяется многократно, и поезд следует с колебаниями скорости в пределах определенной, установленной заранее полосы от 30 до 23 км/ч.
При движении не по горизонтальному участку, а на уклоне поезд будет иметь ускорение и в режиме выбега (кривая 8, рис. 100, б). В этом случае при достижении в точке 9 уровня скорости, соответствующего включению электрического тормоза (32 км/ч), подается команда перехода на тормозной режим, и поезд продолжает движение с мало изменяющейся скоростью, определяемой соотношением между величинами уклона профиля и тормозной силы (кривая 10). Если спуск перейдет в горизонтальную площадку, скорость поезда начнет уменьшаться, и при достижении уровня, соответствующего отключению тормоза (точка 11), подается команда на выбег (кривая 12). При снижении скорости до 23 км/ч (точка 13) подается команда включения режима тяги, и скорость вновь будет увеличиваться (кривая 14).
Управление поездом в пункте остановки осуществляется с помощью системы электромагнитов (рис. 101). При приближении к платформе система управления поездом получает от напольного детектора (первый постоянный магнит 1) команду на переход к режиму выбега (линия gh). Основная шаблонная кривая замедления поезда, воспроизводимая системой АУП, имеет вид кривой abc. С того момента, когда кривая скорости поезда пересечет первую шаблонную кривую в точке h, замедление поезда будет поддерживаться постоянным на уровне 1,1 м/сек2 вплоть до скорости 10 км/ч. За это время поезд проследует мимо второго постоянного магнита 2, и система будет воспроизводить первую подшаблонную кривую dcef.
Когда скорость поезда достигнет значения, соответствующего точке i на этой кривой, автоматически включается электрический тормоз, и далее скорость поезда контролируется второй подшаблонной кривой klm посредством включения и выключения пневматического тормоза с малым тормозным усилием. Когда скорость поезда уменьшится до скорости, соответствующей точке f, отвечающей положению третьего постоянного магнита 3, тормозное усилие возрастает, и поезд замедляет ход до полной остановки.
Постоянные магниты 1—3, гарантирующие точность остановки поезда, расположены на остановочных пунктах по-разному в зависимости от различий в профиле пути. Расстояния между постоянными магнитами выбираются на основе расчета времени хода поезда и уточняются при испытаниях. Такая система компенсирует возможные изменения скорости, которые могут вызываться отклонениями нагрузок на оси и другими изменениями тяговых параметров поезда.

Рис. 101. Принцип автоматического управления поездом в пункте остановки:
1, 2 и 3 — магниты; 4 — место остановки поезда
Основное оборудование системы АУП видно из принципиальной компоновочной схемы (рис. 102). Тахогенератор с генератором импульсов служит для определения скорости и пройденного пути. Точечная детекторная система разработана специально для монорельсовой дороги и обеспечивает восприятие сигналов от постоянных магнитов в пунктах управления. Главный контроллер системы АУП посылает команды тяговому контроллеру, который в соответствии с этими командами управляет тяговыми двигателями вагона.

Рис. 102. Принципиальная схема компоновки оборудования системы АУП: 1 — система АОП; 2 — тахометрический генератор и импульсный генератор; 3 — главный контроллер АУП; 4 — управляющий усилитель; 5 — исполняющий генератор; 6 — блок сравнения; 7 — источник постоянного напряжения; 8 — логическая цепь; 9 — команда на управление; 10 — тяговый контроллер; 11 — команда на трогание с места 12 — точечная детекторная система; 13 — напольные магниты
Главный контроллер системы АУП состоит из следующих основных элементов:
- цепи поступающих сигналов скорости, которая выпрямляет и усиливает напряжение сигналов от тахогенератора;
- цепи поступающих сигналов скорости, которая выпрямляет и усиливает напряжение сигналов от тахогенератора;
- генератора переданных сигналов скорости от напольных устройств;
- блока сравнения, в котором сравнивается фактическая скорость движения с заданной;
- логической релейной цепи;
- регулятора напряжения.
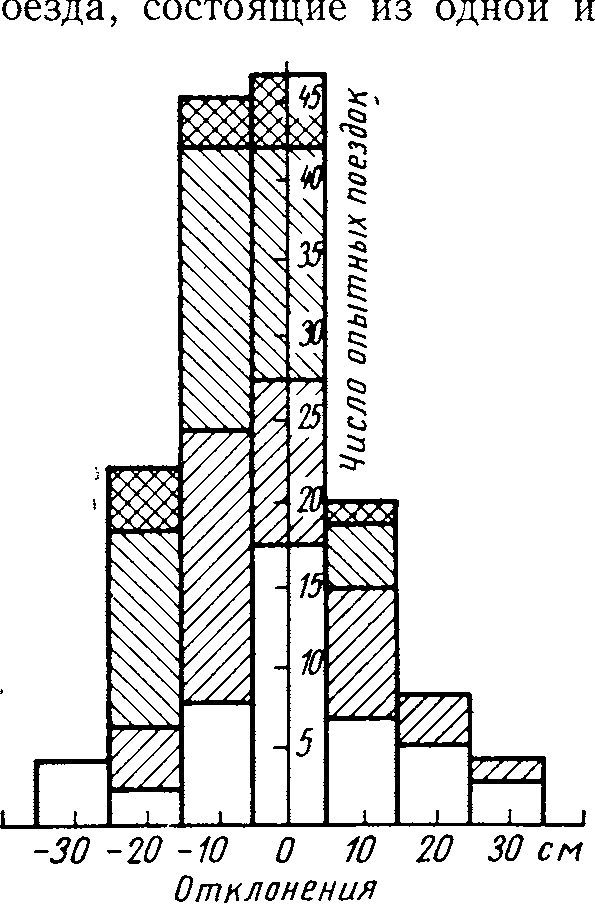
Рис. 103. Гистограмма отклонений точности остановки поездов на станции Инуяма-Юен
Основным узлом главного контроллера является блок сравнения, в котором использован транзисторный логический элемент, применяющийся и в оборудовании системы АОП.
Определение наиболее рационального расположения постоянных магнитов производилось на основе испытания составов с порожними и загруженными вагонами. Вследствие наличия перед конечными пунктами больших подъемов (равных 97% и 63%) двух секций, преодолевают их по- разному, хотя управление осуществляется одним и тем же способом.
В результате испытаний для каждого остановочного пункта были получены гистограммы отклонений от требуемого места остановки поезда (рис. 103), состоящего из одной и двух секций при различном их заполнении: при одной порожней секции (незаштрихованный столбик), при двух порожних секциях (столбик, заштрихованный с наклоном вправо), при одной загруженной секции (столбик, заштрихованный с наклоном влево) и при двух загруженных секциях (столбик, заштрихованный в крестик). Как видно из рис. 103, была достигнута высокая точность остановки поездов с отклонениями не более 30 см при любых условиях.
У навесной монорельсовой дороги в Питтсбурге система автоматического управления поездом состоит из электрических контуров и приборов, расположенных на экипаже, вдоль ходовых балок и сбоку станций. Основой системы является расположенный сбоку эстакады контроллер, который содержит счетно-решающее устройство, управляющее работой всех поездов в пределах этого участка дороги. Весь опытный участок обслуживается одним стационарным контроллером; в нормальных эксплуатационных условиях контроллеры должны располагаться примерно на расстоянии 1,6 км один от другого (обычно у станций). При выходе из строя любого контроллера функции управления движением экипажей автоматически передаются соседнему контроллеру.
На вагоне устанавливается минимум цепей, принимающих решение или последовательных, но имеются приборы, реагирующие на команды, передаваемые расположенным сбоку пути контроллером. Блочная схема (рис. 104) показывает расположенные на вагоне генераторы колебаний 5 и 6, соединенные с антеннами 8. Эти генераторы работают непрерывно с постоянной звуковой частотой. Когда экипаж проходит вдоль рассматриваемого участка дороги, антенны 8 попеременно соединяют провода индуктивных петель, которые смонтированы в форме прямоугольной волны вдоль дороги. Во время движения поезда сигналы изменяются в зависимости от индуктивной связи. Эти сигналы демодулируются и отрабатываются коммутационными аппаратами и передаются цифровой вычислительной машине.

Рис. 104. Блочная схема системы АУП на скоростной дороге в Питтсбурге:
1 — экипаж; 2 — цепи связи вагона; 3 — цепи управления вагоном; 4 — управление тягой и торможением; 5 и 6 — генераторы колебаний; 7 — усилитель частотной модуляции; 8 — антенны генераторов; 9 — провода индукционных петель; 10 — диспетчерский пульт; 11 — управление; 12 — связь; 13 — принимающая и передающая антенна; 14 — контроллер, расположенный сбоку пути
Путевые индуктивные цепи состоят из отдельных петель различной длины. У станций и транспортирующих тележек длина индукционного провода составляет 610 мм. В остальных местах вдоль дороги петли имеют длину 45,7 м. Короткие петли позволяют более точно управлять экипажем во время остановки.
При одновагонном поезде работают оба генератора колебаний вагона. Когда поезд состоит из нескольких вагонов, то работают только генератор 5 на головном вагоне и генератор 6 на хвостовом вагоне; все остальные вибраторы отключаются.
При получении сигналов определенных тонов расположенный сбоку пути контроллер имеет всю информацию, необходимую для управления одним или более поездами на дороге в соответствии с очертанием графика скорость—расстояние, заложенного в контроллер. Расположение поездов на дороге устанавливается по активным петлям и рассчитывается по перерывам во включении и выключении сигналов. Длина поезда определяется по разнице перерывов, а скорость — по времени движения от одной петли до следующей. Контроллер запрограммирован таким образом, что может делать логические выводы, сравнивать варианты и подавать требуемую мощность к поездам для управления скоростью движения, остановками, интервалами безопасности и дверями экипажей всех поездов.
Движение поездов на дороге осуществляется автоматически после нажатия оператором кнопки начала движения.
Командой поезду является кодированный сигнал с тремя из шести применяемых тонов. Получаемые на вагоне сигналы демо- дулируются и усиливаются. Система гарантирует принятие только трех тонов. После этой проверки декодирующее устройство выдает команду в цепи управления о приведении поезда в движение или об управлении дверями. Для максимальной надежности и безопасности применены также цепи безопасности при повреждении.
Ток контроля безопасности (седьмой тон) передается с точно определенными интервалами. При прекращении этого сигнала расположенный сбоку путевого устройства контроллер осуществляет экстренную остановку поездов.