ГЛАВА III
МАНЕВРОВЫЕ УСТРОЙСТВА С УПОРНОЙ БАЛКОЙ
В настоящее время при проектировании новых угольных предприятий и реконструкции существующих широко применяются устройства с упорной балкой. Находят они применение также и в других отраслях при загрузке в вагоны массовых сыпучих материалов.
Опытный образец такого устройства АМТ-1 с приводом постоянного тока по проекту института Гипроуглегормаш был изготовлен и испытан в 1963 г. на шахте «Западная» комбината Карагандауголь [1.4]. Испытания трех образцов опытно-промышленной партии были проведены на шахтах Карагандинского бассейна и треста Эстонсланец. После корректировки [26] Карагандинским заводом РГШО серийно выпускалось маневровое устройство МУ-25. Одновременно институт совместно с заводом-изготовителем провел работы по дальнейшей модернизации этого устройства с целью создания более простого и дешевого привода перемещения, а также схемы управления, основанной на релейной и контакторной аппаратуре, широко используемой в угольной промышленности. Для привода перемещения были использованы асинхронные двигатели с короткозамкнутыми роторами.
Первоначальная стоимость устройства МУ-25 была 22 тыс. руб. Стоимость устройства с приводом переменного тока МУ-25А составила 18 тыс. руб. [29]. Начиная с 1968 г. Ново-Горловский машиностроительный завод серийно выпускает маневровые устройства МУ-25А.
I. МАНЕВРОВОЕ УСТРОЙСТВО МУ-25
Устройство [30] представляет собой портальную тележку, размеры которой позволяют проходить внутри портала 4-, 6- и 8-осным вагонам (рис. 23). Устройство может перемещаться на участке длиной 22 м по железнодорожному пути с шириной колеи 4255 мм. Величина хода обеспечивает перемещение состава на длину одного вагона. Портальная тележка имеет поперечную упорную балку, перемещающуюся в вертикальном направлении.

Рис. 23. Маневровое устройство МУ-25.
В крайнем верхнем положении балка находится над составом, при нижнем положении она опускается в межвагонный промежуток до уровня автосцепного устройства вагона. В средней части балка имеет специальные замки, с помощью которых осуществляется ее соединение с автосцепным устройством. Замки, выполненные в виде двойной плавающей вилки, вставлены во втулки, отверстия которых позволяют замкам разворачиваться в горизонтальной плоскости на угол 8° и устанавливаться по автосцепкам. Конструкция замка обеспечивает соединения с автосцепками при одинаковом их расположении по высоте, а также если расстояние между ними по высоте не превышает 190 мм. Замок допускает отклонение автосцепок от оси пути в поперечном направлении на ±50 мм. Точность остановки балки в продольном направлении для нормального ее соединения с автосцепками должна быть в пределах ±60 мм. Замок допускает соединение балки с составом как при сцепленном положении двух вагонов, так и при необходимости прицепить первый или последний вагон состава (рис. 24). Перемещение балки осуществляется с помощью двух канатов, наматываемых на барабаны лебедок, имеющих червячные редукторы РЧП-300, которые приводятся в действие многоскоростным электродвигателем МТКВ-311-6 (11 кВт при ПВ=25%). Остановка привода производится колодочным тормозом ТКТ-200.
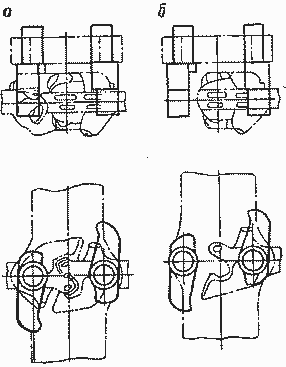
Рbс. 24. Положение замков упорной балки:
а — при захвате между вагонами; б — при захвате крайнего вагона
Привод подъема балки устанавливается на раме портала. Там же располагается привод перемещения портальной тележки с двигателем постоянного тока ДП-42 (М=21 кВт при ПВ=25%; n=660 об/мин). Двигатель через раздаточный редуктор, два редуктора ЦДН-5А и открытые зубчатые передачи передает вращение двум барабанам (рис. 25). Наматываемый на барабан канат через четыре полиспаста укладывается в один слой канатоукладчиками с винтовым приводом (на рис. 25 показаны два полиспаста). При включении двигателя приводные барабаны, вращаясь, выбирают канаты из передних по направлению движения устройства полиспастов и наматывают их на себя. Полиспасты противоположной стороны в это время раздвигаются, сматывая канат с барабанов.
В связи с тем, что группа I блоков полиспаста закреплена на портале, а группа II — на анкерной опоре, полиспасты, сжимаясь, подтягивают портальную тележку к анкерным опорам, передавая тяговое усилие через упорную балку составу. При аварийных остановках привод перемещения портала стопорится колодочным тормозом ТКТ-200.
Техническая характеристика маневрового устройства МУ-25
Максимальное тяговое усилие, тс 25
Скорость перемещения, м/с:
рабочая . 0,02—0,18
холостого хода .. 0,36
Полиспаст:
кратность . 8
диаметр блоков, мм 500
диаметр каната, мм 15,5
Привод перемещения:
диаметр барабана, мм 900
передаточное число редуктора ЦДН-5А 12,31
передаточное число раздаточного редуктора . . 1
передаточное число открытой передачи 1,83
Привод упорной балки:
диаметр барабана, мм · 300
передаточное число редуктора РЧП-300 ... 49
диаметр каната, мм 17,5
скорость перемещения балки, м/с 0,32
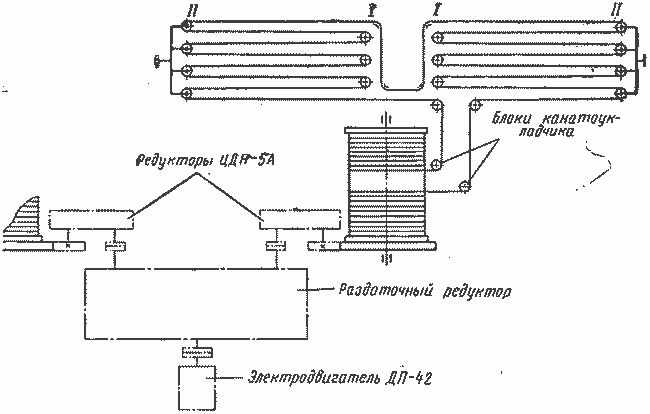
Рис. 25. Схема привода подъема балки
Электроснабжение приводов, установленных на портале, осуществляется через токоподводящее устройство, состоящее из шести кабелей, подвешенных на роликовых тележках к тросу и свободно перемещающихся по нему. Трос натягивается между анкерными опорами. При перемещении портальной тележки кабели растягиваются вдоль троса или собираются в петли.
Электрооборудование устройства [31] располагается в блоке магнитных усилителей на контакторной и релейной панелях, пульте управления, портале и на рельсовых путях. Панели и блок установлены в герметизированные металлические ящики, которые вместе с двигатель-генераторной группой размещаются в распределительном пункте комплекса погрузки.
Принципиальная электрическая схема управления устройством приведена на рис. 26. Двигатель привода перемещения МТ питается от управляемого генератора по системе генератор — двигатель. Обмотка возбуждения генератора ОВГ питается от блока магнитных усилителей МУ, состоящего из силовых трехфазных и предварительных однофазных магнитных усилителей, собранных по двухтактной мостовой схеме. Обмотки управления последних сосредоточивают в себе все функции управления приводом и дают возможность путем соответствующего выбора обратных связей получить «экскаваторные» механические характеристики, а также автоматически влиять на характер переходных процессов. Реверсирование двигателя осуществляют изменением полярности обмотки возбуждения генератора, что приводит к изменению полярности на щетках генератора и двигателя и к перемене направления вращения последнего.

Рис. 26. Принципиальная электрическая схема маневрового устройства МУ-25
Пуск и регулирование скорости двигателя производят изменением величины тока в задающих обмотках блока магнитных усилителей. Для улучшения качества процесса регулирования системы предусмотрены обратные связи. Положительная обратная связь по току главной цепи обеспечивает жесткость механических характеристик приводов. Обмотка жесткой отрицательной обратной связи по току главной цепи с отсечкой служит для ограничения максимального усилия тяги привода и начинает размагничивать генератор при токе, составляющем 1,6 номинального тока двигателя. Полное размагничивание генератора и остановка двигателя происходят при токе, равном 2,5 номинального, что соответствует максимальному усилию тяги 25 тс. Для снижения тока в главной цепи при отключении задающих обмоток (остановке привода) обмотки жесткой отрицательной обратной связи блокировочным реле РБ1 включаются на падение напряжения в цепи главного тока, переводя двигатель в тормозной режим (генераторное торможение).
Скорость рабочего хода маневрового устройства можно плавно регулировать с помощью переменных резисторов в цепи задающих обмоток, чем обеспечивается качественная загрузка вагонов при разных типах погрузочных устройств и их производительности. Для повышения точности остановки схемой предусмотрено включение перед остановкой «ползучей» скорости, равной 0,02 м/с.
Перемещение в обратную сторону (холостой ход) осуществляется с увеличением скорости до 0,36 м/с за счет ослабления поля двигателя вдвое вводом резистора в цепь обмотки возбуждения двигателя ОВМТ.
Управление маневровым устройством осуществляется дистанционно с пульта, установленного в непосредственной близости от погрузочного пункта, с тем, чтобы обеспечить оператору возможность наблюдения за опусканием балки.
Управление приводом перемещения устройства производится с помощью универсального переключателя ВДУ на пять положений: нулевое и по два на каждое направление движения с «ползучей» и рабочей скоростями. Контакты переключателя ВДУ замыкают цепи командных промежуточных реле, которые, в свою очередь, подключают соответствующие добавочные резисторы в цепи задающих обмоток магнитных усилителей, что обеспечивает заданные направления перемещения и скорости. Включение двигателя привода балки осуществляется кнопками КнБВ (ход вверх), КнБН (ход вниз) и КнБС («Стоп»), контакты которых коммутируют цепи промежуточных реле РБВ и РБН, а те, в свою очередь,— цепи контакторов КБВ и КБН.
Перемещения портала ограничиваются в крайних положениях конечными выключателями ВТВ и ВТН, перемещения балки — выключателями ВБВ и ВБН. Контакты выключателей замыкают цепи соответствующих командных реле непосредственно или через промежуточные реле.
Схемой предусмотрен автоматический возврат устройства в исходное положение («обгон») после выполнения рабочего хода. «Обгон» включает в себя подъем балки, перемещение портала на длину одного вагона, поиск межвагонного промежутка и опускание балки до соединения с автосцепкой. «Обгон» может выполняться в обе стороны, для чего на пульте имеются две кнопки КнО η КнОМ. Кнопка КнО обеспечивает выполнение «обгона» при погрузке состава, а кнопка КнОМ — при маневре (перегоне) состава в сторону, противоположную направлению его перемещения при погрузке.
Остановка устройства над автосцепкой осуществляется при помощи трех фотореле, установленных на портале и реагирующих на освещение их приемников в межвагонном промежутке. В зависимости от направления обгона включают среднее пли крайнее (переднее по направлению движения) фотореле.
При выполнении «обгона» схема работает следующим образом. Нажатием кнопки обгона включаются реле РБВ и контактор КВБ. Балка начинает подниматься. Одновременно с этим срабатывает реле «обгона» РБО (РБОМ), которое подготавливает цепи задающих обмоток, командных реле РРВ (РРН), блокировочного реле РБ2, а также реле снижения поля РП. При подъеме балка в крайнем верхнем положении воздействует на выключатель ВБВ, вызывая включение реле РВБ, РРВ (РРН), которые, в свою очередь, замыкают цепь задающих обмоток для разгона устройства до номинальной скорости. Когда напряжение генератора достигает номинального значения, срабатывает реле РП, которое производит ослабление поля двигателя, и устройство с повышенной скоростью выполняет холостой ход. Как только первые два фотореле окажутся в следующем межвагонном промежутке, их выходные реле замкнут цепь реле РБ2 и РПВ (РПН), что приведет к уменьшению тока в задающих обмотках, снятию ослабления поля двигателя и уменьшению скорости до «ползучей». При затемнении переднего фотореле следующим вагоном маневровое устройство останавливается. По истечении выдержки времени реле РВ, которое предназначено для успокоения системы после команды на остановку, включается реле РБН, и балка опускается. Блок-контакт контактора КБН, снимает с блокировки реле РБО (РБОМ) и РБ2, так как на этом цикл обгона закончен.
Началу работы маневрового устройства предшествует предварительная звуковая сигнализация, время действия которой задает реле времени РВПС. После отключения сигнала включаются реле РАО и двигатель-генераторная группа.
В цепи реле РАО имеются контакты следующих видов защиты:
от обрыва обмотки возбуждения двигателя (токовое реле РОП),
от перемещения портала за пределы датчиков нормальной остановки (выключателя ВТВА и ВТНА),
от поломки при перемещении канатоукладчиков до упора (выключатели ВКВА и ВКНА),
от переподъема балки и излишнего сматывания каната (выключатели ВБВА1, ВБВА2, ВБНА),
от перегорания ламп осветителя фотореле (токовое реле РЛФ).
При размыкании любого из перечисленных контактов реле РАО обесточивается и отключает питание схемы управления и приводов с наложением на них тормозов. Для восстановления цепи реле РАО и исключения аварийного наезда на конечный выключатель эти контакты зашунтированы обходными переключателями: ВОТ — для перемещения портала и ВОБ — для перемещения балки. Второй контакт обходного переключателя разрывает цепь включения привода в сторону аварийного наезда, разрешая ход только в противоположную сторону. Схемой также предусмотрены следующие блокировки:
включения привода балки при движущемся портале (контакт реле РВ в цепи реле РБВ и РБН);
ослабления поля двигателя при любом положении балки, кроме верхнего, и неполном напряжении питания (контакт реле РВБ в цепи реле РП, подключение реле РП к зажимам генератора).
Кроме того, для исключения посадки балки в тот же межвагонный промежуток при «обгоне», что возможно, если происходит перемещение вагонов после подъема балки, предусмотрен контакт фотореле РФ2 в цепи реле РП.
Таким образом, электрическая схема обеспечивает дистанционное управление маневровым устройством яри перемещении состава и автоматическое — при «обгоне», позволяя использовать устройство для комплексной механизации и автоматизации погрузочно-разгрузочных работ.