Общие замечания.
Одна из основных задач системы управления ЭПС — это формирование тяговых и тормозных характеристик.
Существуют три канала регулирования тягового асинхронного привода: изменение частоты и напряжения статора U1 , а также частоты в роторе/^ (абсолютного скольжения).
Как было отмечено в 5.2, закон Костенко![]() = const получен при следующих допущениях:
= const получен при следующих допущениях:
- синусоидальная форма напряжения и тока;
- отсутствие насыщения стали, пренебрежимо малый ток намагничивания;
- пренебрежимо малые активное и индуктивное сопротивления статора
 ;
; - постоянство сопротивления ротора r2 (независимость r2 от температуры).
Эти допущения могут быть приняты при номинальном режиме работы двигателя, но при пуске сопротивление обмоток статора r1 и соизмеримо с приведенным сопротивлением ротора![]() и влияние сопротивлений обмоток статора должно быть учтено. В процессе пуска для обеспечения постоянства момента на валу двигателя необходимо поддерживать постоянство частоты в роторе fs. При этом частота напряжения и тока в обмотке статора f1, которая задается частотой переключения тиристоров АИ, определяется соотношением
и влияние сопротивлений обмоток статора должно быть учтено. В процессе пуска для обеспечения постоянства момента на валу двигателя необходимо поддерживать постоянство частоты в роторе fs. При этом частота напряжения и тока в обмотке статора f1, которая задается частотой переключения тиристоров АИ, определяется соотношением
![]()
где Dk — диаметр движущего колеса, м; μ — передаточное число редуктора; V — скорость, м/с.
В настоящее время для управления асинхронным тяговым приводом используются три принципа: по абсолютной частоте скольжения, по углу момента (векторная система) и прямое управление моментом.
Регулирование по абсолютному скольжению.
Этот способ основан на зависимостях тока статора и вращающего момента от частоты скольжения (рис. 5.17).

Сплошные линии соответствуют неподвижному ротору (п2=0), штриховые — вращающемуся.
Из рис. 5.17 следует:
- минимум тока статора при разной температуре соответствует разным абсолютным скольжениям, которые отличаются в 1,5—2 раза при изменении температуры от -45 °C до +50 °C;
- пусковая частота выбирается в зависимости от величины тока для достижения максимального пускового момента.
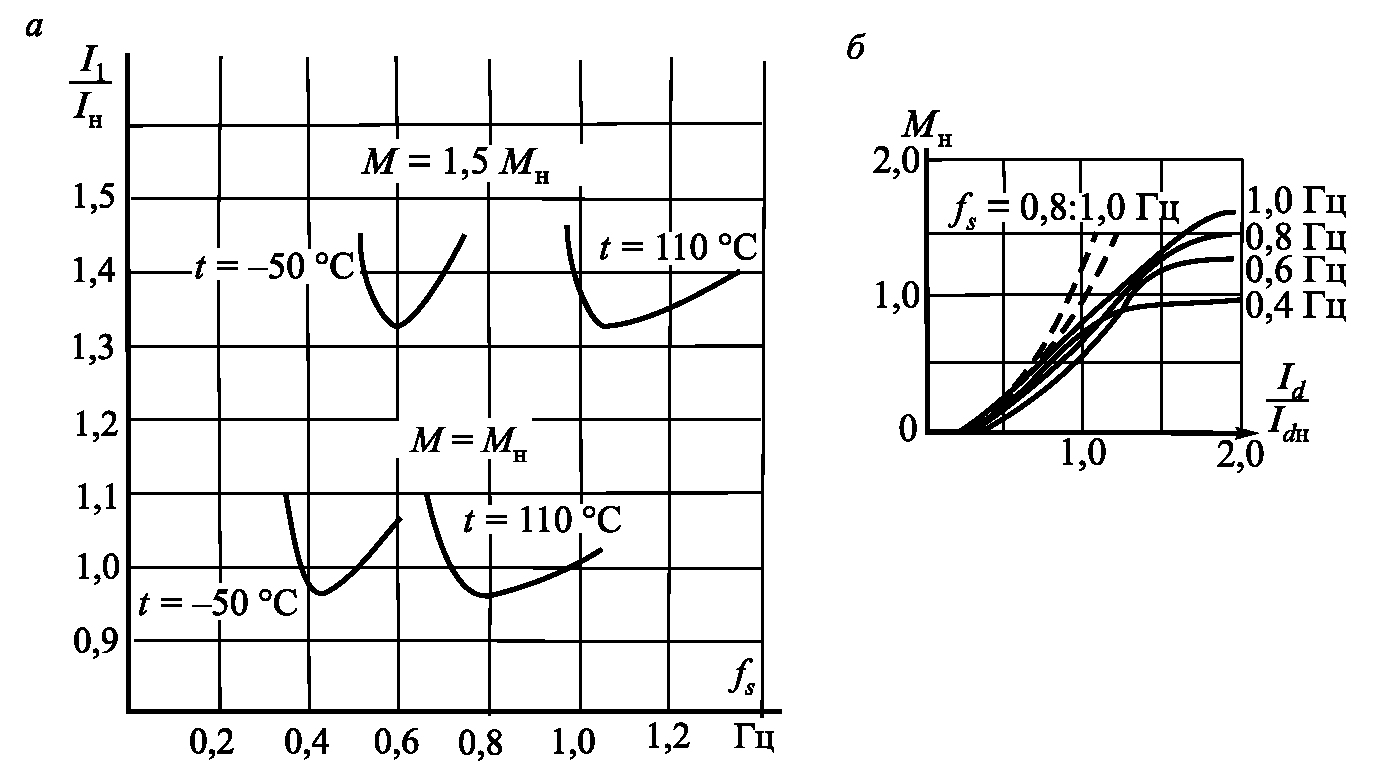
Рис. 5.17. Зависимости от частоты скольжения АТД: а — тока статора;
б — вращающего момента
При повышении температуры ротора минимум тока статора смещается в зону больших скольжений. Кривая![]() становится более пологой.
становится более пологой.
Недостатки.
- использование параметрических зависимостей
 , которые могут отличаться у разных двигателей одной серии;
, которые могут отличаться у разных двигателей одной серии; - необходимость корректировки сигнала f в зависимости от температуры ротора;
- невозможность непосредственного измерения температуры обмотки короткозамкнутого ротора.
Основное достоинство состоит в относительной простоте построения.
Регулирование по углу момента (векторная система).
Углом момента θ называется угол между векторами тока статора![]() и потокосцепления
и потокосцепления![]() .
.
Угол θ можно выразить через скалярные величины: электромагнитный момент Мэ м и модуль потокосцепления ψ2:
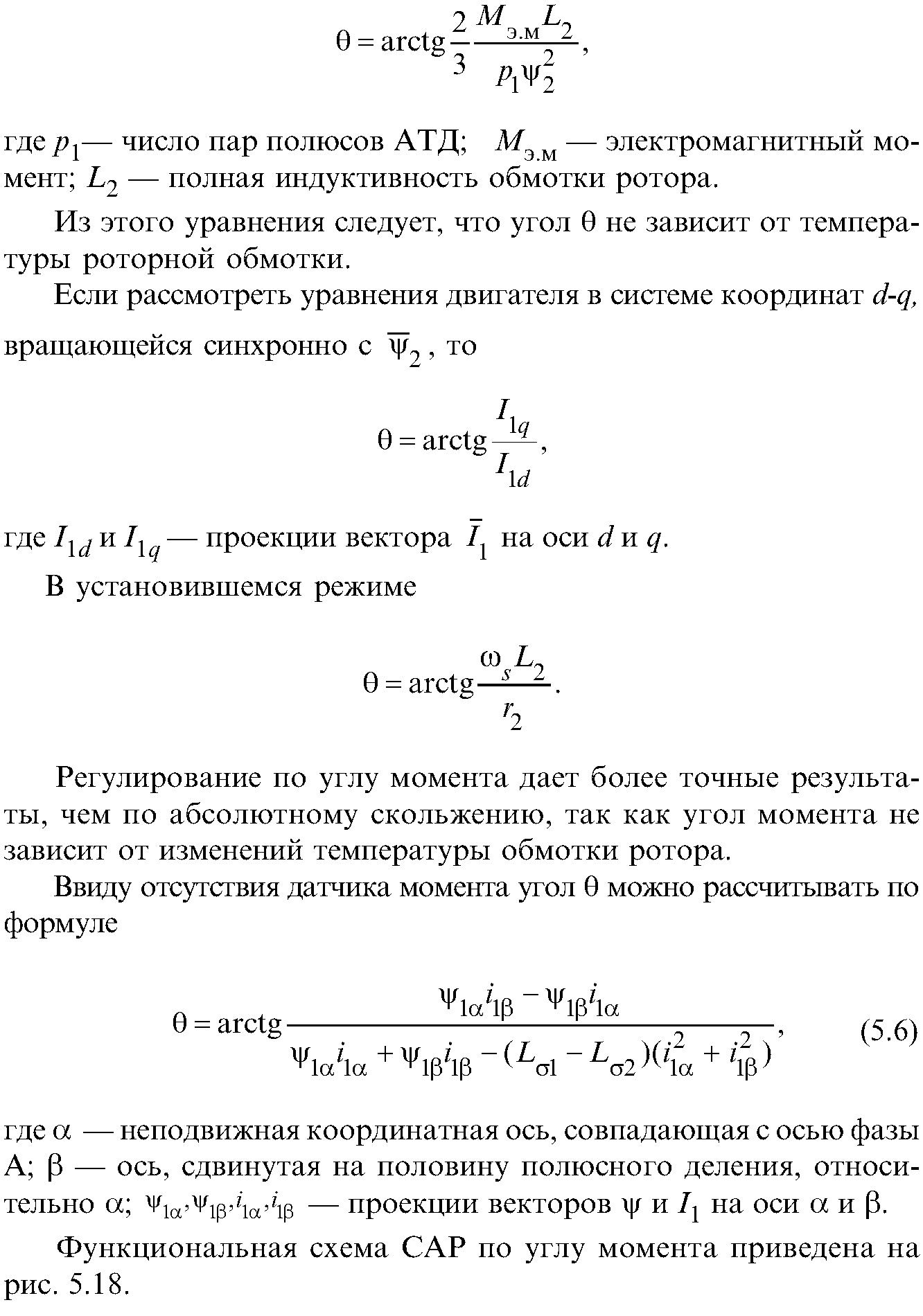
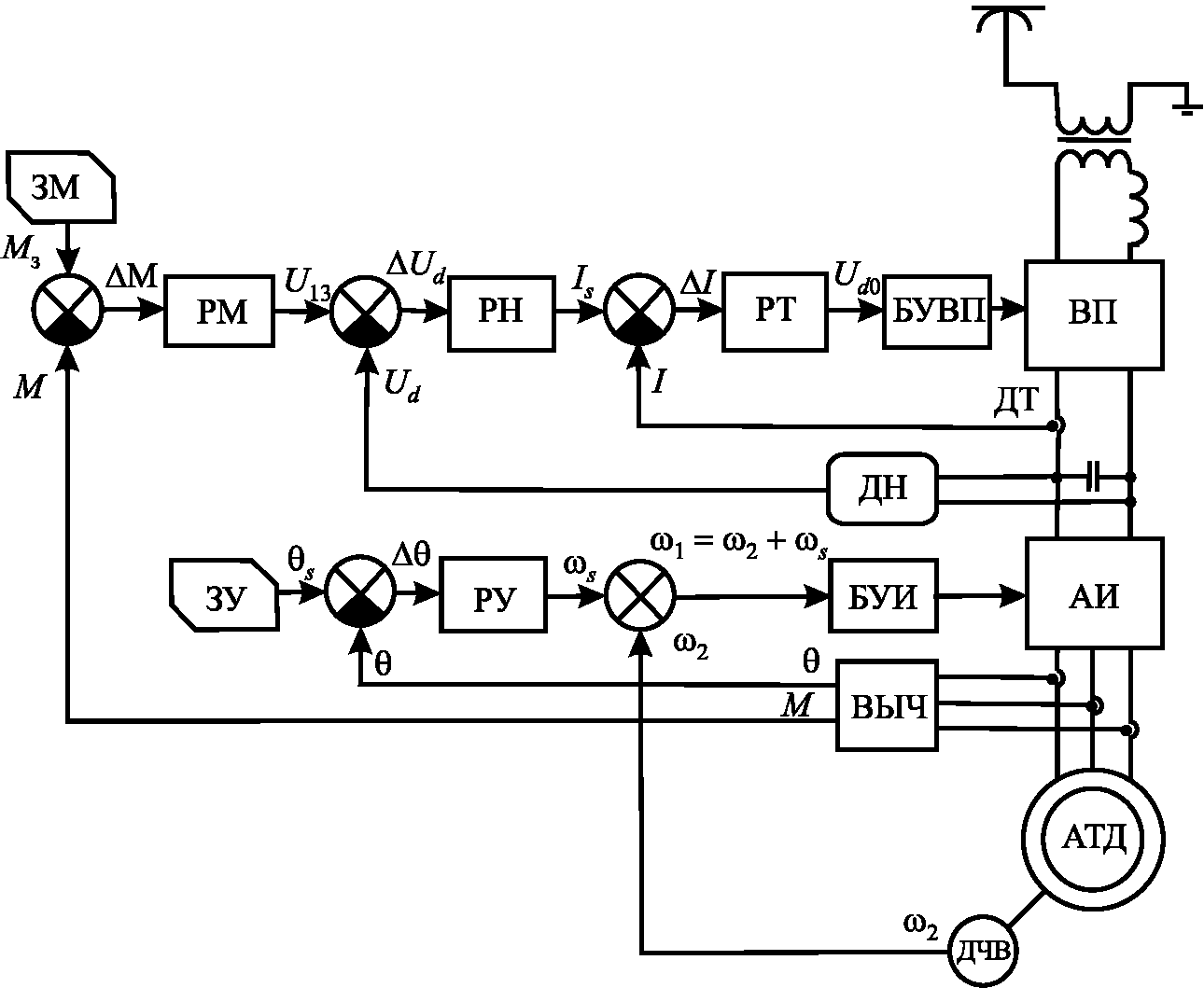
Рис. 5.18. Функциональная схема САР по углу момента
Здесь приняты следующие обозначения:
PM, PH, РТ, РУ — регуляторы момента, напряжения, тока и угла соответственно;
ДТ, ДН, ДЧВ — датчики тока, напряжения, частоты вращения соответственно;
ЗМ, ЗУ— задатчики момента и угла;
БУВП, БУИ — блоки управления входным преобразователем и инвертором;
ВЫЧ — вычислительное устройство;
ВП — входной преобразователь.
Система управления по углу момента имеет два контура регулирования:
1. Контур регулирования угла момента АТД с подчиненным контуром регулирования частоты АН. Задатчик угла ЗУ формирует
265
преобразуется регулятором тока РТ в сигнал управления напряжением входного преобразователя ВП. Регулятор тока компенсирует наклон внешней характеристики входного преобразователя и ограничивает токи перегрузок.
Система прямого управления моментом [27].
Вращающий момент асинхронного двигателя пропорционален векторному произведению потокосцеплений статора ψ1 и ротора ψ2. Модуль вектора ψ1 определяется напряжением на статоре АД.
При питании трехфазного АД от автономного инвертора вектор напряжения на каждой фазе статора может занимать одно
из шести положений U1 — U6 относительно неподвижной системы координат в зависимости от того, какие ключи инвертора замкнуты (рис. 5.19, а). Прямое управление вращающим моментом АД осуществляется за счет коммутации ключей инвертора с таким расчетом, чтобы переход от одного возможного положения вектора напряжения статора к другому, обеспечил необходимые значения потокосцепления статора ψ1 и угла γ между векторами потокосцепления статора ψ1 и тока ротора I2. Общая структура системы прямого управления моментом ПУМ показана на рис. 5.19, б.
Задатчик интенсивности ЗИ формирует сигнал заданной частоты вращения ротора![]() , обеспечивающий разгон с постоянным ускорением и стабилизацию скорости на требуемом уровне. Далее сигнал проходит низкочастотный фильтр первого порядка Ф и сравнивается с оценкой фактической скорости ротора ω2, поступающей от блока вычисления скорости БВС.
, обеспечивающий разгон с постоянным ускорением и стабилизацию скорости на требуемом уровне. Далее сигнал проходит низкочастотный фильтр первого порядка Ф и сравнивается с оценкой фактической скорости ротора ω2, поступающей от блока вычисления скорости БВС.
Пропорционально-интегральный регулятор скорости PC и звено ограничения 30 формируют заданное значение момента М*.
266
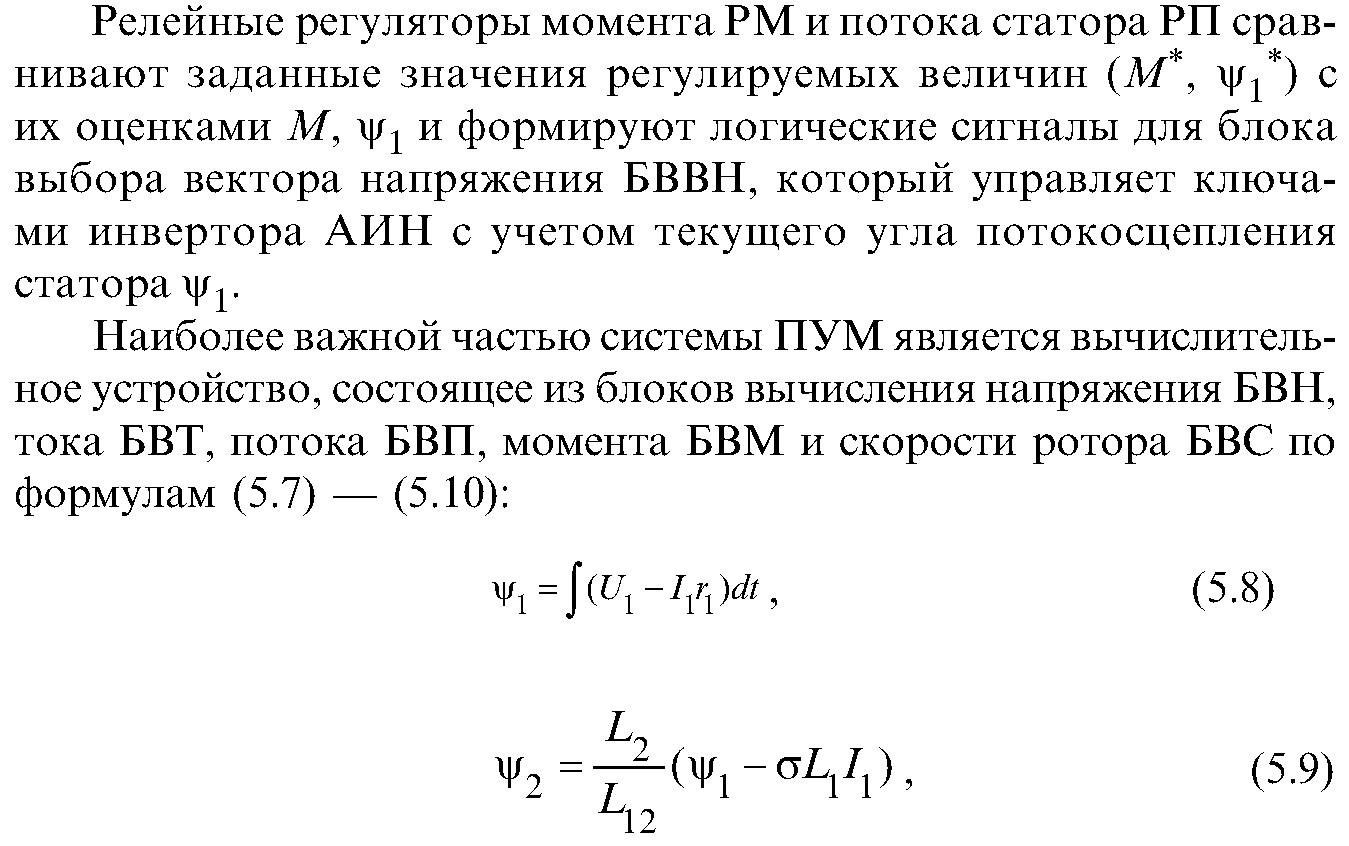
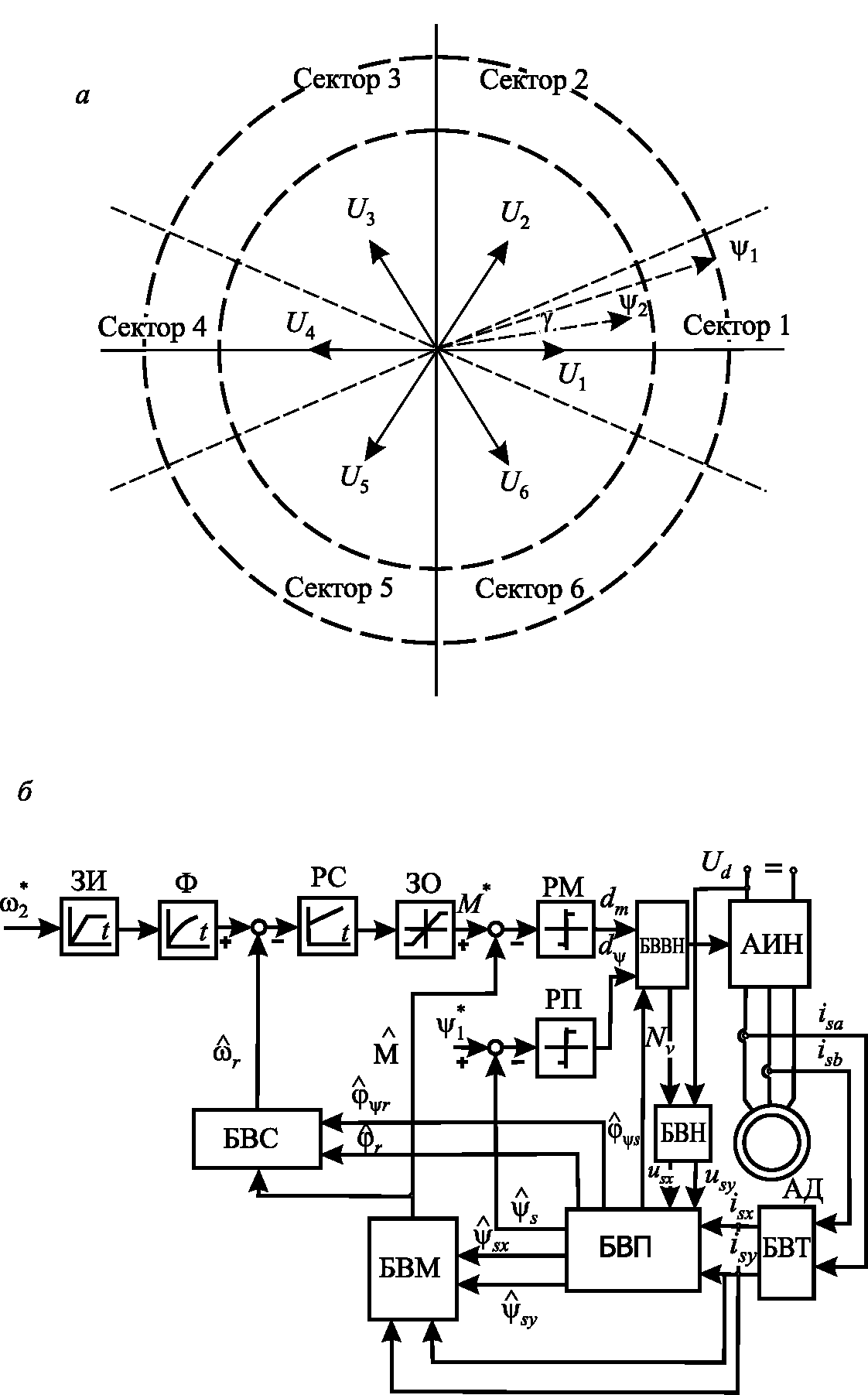
Рис. 5.19. Система прямого управления моментом:
а — возможные положения вектора напряжения; б — структурная схема САР
![]() (5.10)
(5.10)
где ω0 — угловая скорость вращения потока статора; L1, L2, Ln — соответственно оценки индуктивности статора, ротора и взаимной индуктивности; σ — оценка коэффициента рассеивания; r1 и r 2 — оценки активных сопротивлений обмоток статора и ротора соответственно.
Оценки параметров, входящих в уравнения (5.7) — (5.10), определяются в режиме предварительного намагничивания двигателя постоянным током с переходом в режим ограничения потока. Это позволяет учесть насыщение магнитной цепи.
Система прямого управления моментом использует только датчики тока и напряжения и не требует применения датчика скорости. Удовлетворительное качество переходных процессов обеспечивается, если погрешность оценок r 1 и r 2 не превышает 5 %. Поэтому в системе должны быть предусмотрены алгоритмы адаптации к нагреванию обмоток двигателя.