Наименьший расход энергии при заданном времени хода обеспечивает режим движения поезда с постоянной скоростью V = const. Однако на разных участках пути требуется реализовать различные значения скорости. В частности, перед отправлением поезда, а также после его остановки V = 0. Поэтому возникает необходимость перехода от одного установившегося значения скорости к другому. Для изменения скорости рекомендуется равноускоренное или равнозамедленное движение dV/dt = const (рис. 1.2).
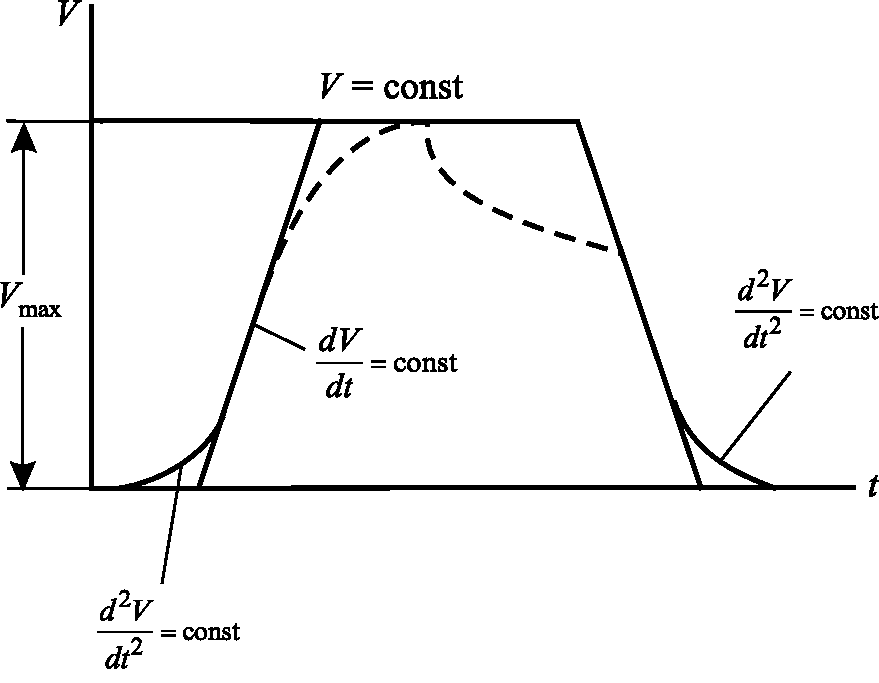
Рис. 1.2. Режимы движения поезда
Необходимо учитывать, что внезапное изменение величины ускорения воспринимается как удар, создающий дополнительные нагрузки на конструкцию подвижного состава и вызывающий неприятные ощущения у людей, находящихся в поезде. Поэтому следует предусматривать плавное изменение ускорения, поддерживая постоянный темп изменения ускорения d 2 V/dt = const. При служебном и регулировочном торможении следует принимать dV/dt = 0,5 м/с2 и d2V/dt2 = 0,25 м/с3, а при экстренном — dV/dt = 2,2 м/с2 и d2V/dt2 =10 м/с3.
Таким образом, система управления должна предусматривать три основных режима движения поезда: V = const, dV/dt = const и d 2V/dt 2 = const. С учетом реальной формы тяговой характеристики и применения выбега зависимость V(t) будет иметь вид, показанный на рис. 1.2 штриховой линией.
Как известно, установившаяся скорость движения поезда определяется точкой пересечения характеристики полного сопротивления движению W(F) и тяговой F(V) (точка V на рис. 1.3, а). Чтобы при той же скорости поезд имел ускорение dV/dt, сила тяги должна быть равна Fz = Fy + (I + γ) mndV/dt (точка Z). Здесь mn — масса поезда, 1+ γ — коэффициент инерции вращающихся частей.
Требуемые значения скорости движения поезда задаются необходимой скоростью сообщения, условиями безопасности движения, а также вариацией сопротивления движению, массы поезда и профиля пути. Разнообразие условий движения поезда ставит перед СУ ЭПС требование обеспечить возможность реализации режимов, соответствующих любым точкам в пределах существующих ограничений тяговой характеристики ЭПС Fk(V) (рис. 1.3, б) по сцеплению — 7, по скорости — 2 и по допустимому режиму работы ТЭД — 3. Аналогичные ограничения имеют место и для тормозных характеристик B(V) (1'; 2' и 3' на рис. 1.3, б).
Это требование выполняется полностью только при плавном регулировании режима работы ТЭД. Так, например, для поддержания постоянства скорости Vx = const (рис. 1.3, в) с поездами различной массы на подъемах различной крутизны необходимо при этой скорости плавно регулировать силу тяги в пределах от F1 до 0.
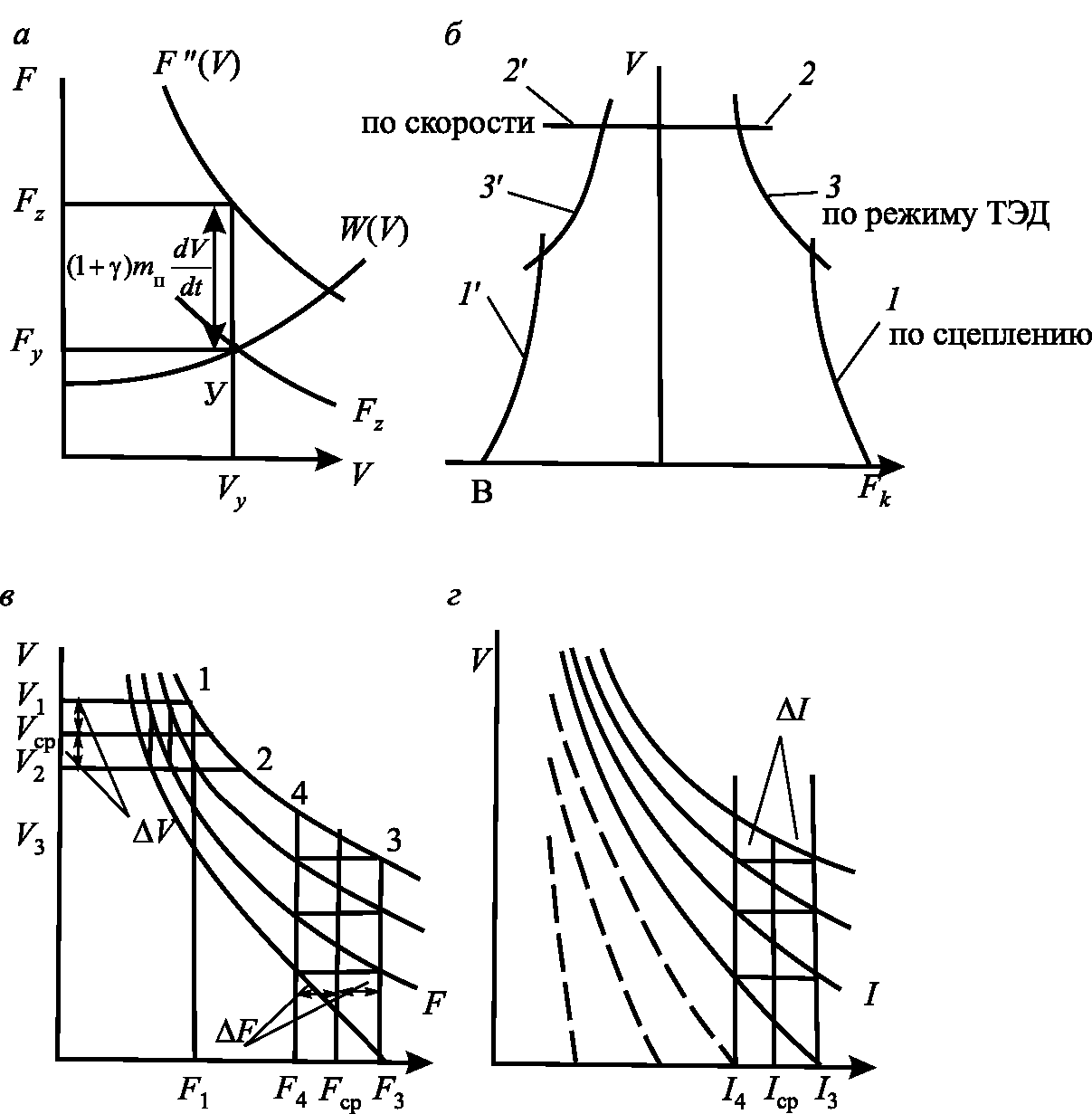
Рис. 1.3. Реализация режимов движения поезда:
а — определение скорости движения поезда; б — ограничение тяговых и скоростных характеристик; в — ступенчатое регулирование силы тяги и скорости; г — колебания пускового тока характеристики разгонных и маневровых ступеней
При ступенчатом регулировании скорости вариация сопротивления движению требует перехода с одной тяговой характеристики на другую, вследствие чего установившаяся скорость Vуст может принимать любое значение в пределах![]() .
.
Возможные отклонения установившейся скорости от максимально допустимой можно охарактеризовать коэффициентом неравномерности регулирования скорости
![]()
где ![]()
Для электровозов со ступенчатым регулированием ΚнV =0,03- 0,06, причем меньшие значения относятся к электровозам переменного тока. При плавном регулировании KnV =0.
Равноускоренное движение поезда чаще всего реализуется при пуске, когда скорость поезда должна возрасти от 0 до V3 (см. рис. 1.3, в). Система управления с плавным регулированием режима работы ТЭД должна обеспечивать постоянство силы тяги F3=const в этом диапазоне изменения скорости.
Ступенчатое регулирование силы тяги за счет перехода с одной тяговой характеристики на другую сопровождается изменением силы тяги F в пределах![]() .
.
Колебания силы тяги при ступенчатом регулировании можно охарактеризовать коэффициентом неравномерности пусковой силы тяги K^f .
![]()
где
![]()
Поскольку на ЭПС отсутствуют приборы, измеряющие непосредственно силу тяги, то о ее величине обычно судят по косвенному показателю — по току тягового электродвигателя I, который связан с силой тяги F известным соотношением F = СФ1, где С — постоянный коэффициент, зависящий от параметров ТЭД и тяговой передачи; Ф — магнитный поток ТЭД.
На практике плавность ступенчатого пуска характеризуют коэффициентом неравномерности пускового тока КнI (рис. 1.3, г)
![]()
где
![]()
С уменьшением КпI пуск становится более плавным, но при реализации большего количества ступеней пуска усложняется система управления ЭПС, требуется большее количество коммутационных аппаратов и соединительных проводов. С повышением пускового ускорения требования к плавности пуска возрастают.
Значения КпIдля различных типов ЭПС и способов регулирования режима ТЭД приведены в табл. 1.1. При плавном регулировании КпI= 0.
Таблица 1.1
Коэффициенты неравномерности пуска
Тип ЭПС | Способ ступенчатого пуска | КпI |
Электровозы | Реостатный | 0,07—0,08 |
Электропоезда | Реостатный | 0,08—0,10 |
Поезда метрополитена | Реостатный | 0,04—0,06 |
Различают следующие виды ступеней пускового регулирования.
Разгонные ступени предназначены для реализации максимального значения пускового тока и силы тяги. На рис. 1.3, г разгонные ступени показаны сплошными линиями. Работа на этих ступенях занимает основную часть времени пуска.
Маневровые ступени (штриховые линии на рис. 1.3, г) отличаются от разгонных тем, что ток ТЭД на них меньше максимального даже при неподвижном электровозе. Эти ступени позволяют регулировать интенсивность нарастания пускового ускорения и предназначены для плавного трогания с места, маневровой работы, прицепки электровоза к составу.
Каждый из этих видов ступеней имеет свои особенности расчета, которые обусловлены требованиями к скорости перевозок, плавности хода поезда, безопасности движения, а также ограничениями тяговых и тормозных характеристик ЭПС.
Выводы:
- СУ ЭПС должна обеспечить реализацию режимов движения поезда при V = const, dV/dt = const и d2V/dt2 = const в пределах ограничений тяговой и тормозной характеристик.
- Значения скорости V, ускорения dV/dt и темпа изменения ускорения d2V/dt 2 диктуются требованиями безопасности движения и плавности хода поезда.
- Постоянство V, dV/dt и d 2V/dt2 может быть полностью реализовано только при плавном регулировании сил тяги и торможения.
- При ступенчатом регулировании сил тяги и торможения можно обеспечить постоянство только для средних значений V, dV/dt и d2V/dt2. Мгновенные значения этих величин будут колебаться в пределах, определяемых коэффициентами неравномерности пуска и торможения.