Реостатное торможение при независимом возбуждении ТЭМ
Недостатки реостатного торможения с последовательным возбуждением:
- жесткие характеристики для регулирования тормозной силы необходимо изменять rт;
- для изменения rт требуются силовые контакторы;
- большое время самовозбуждения.
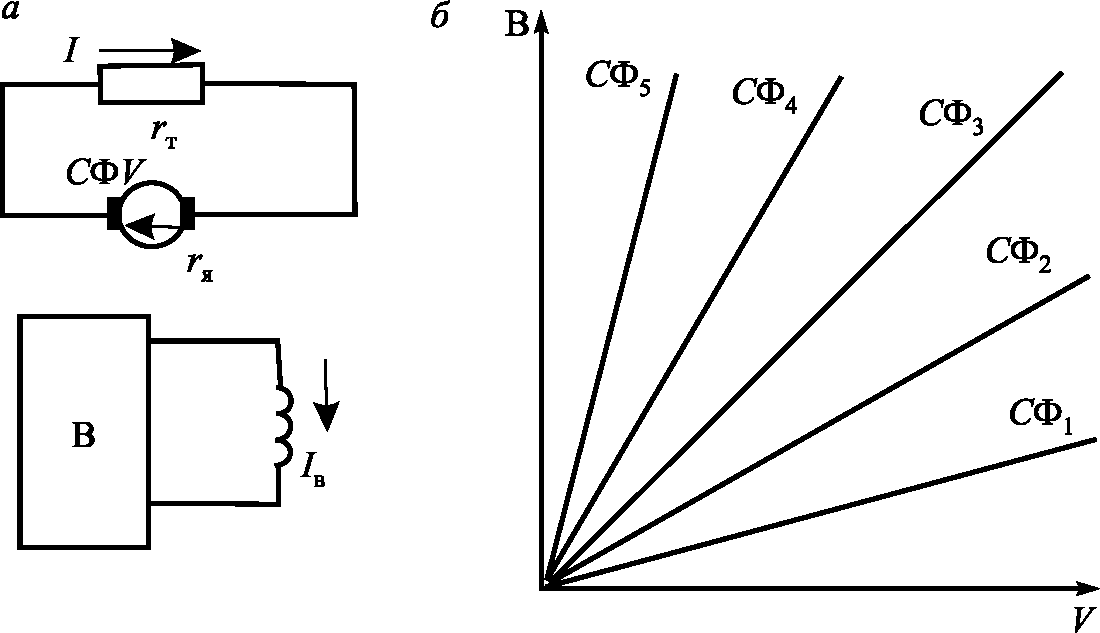
Рис. 4.16. Реостатное торможение с независимым возбуждением: а — электрическая схема; б — тормозные характеристики
Характеристики независимого возбуждения.
Принципиальная схема реостатного торможения с независимым возбуждением приведена на рис. 4.16, а. Здесь В — возбудитель, источник независимого питания обмоток возбуждения.
Обмотки возбуждения тяговой машины могут получать питание:
- непосредственно от контактной сети (троллейбусы с двигателями смешанного возбуждения);
- от электромашинного возбудителя (ЭР22), приводимого во вращение двигателем ДВ, питающимся от контактной сети;
- от управляемого однофазного выпрямителя (ВЛ80Т, ВЛ80С, ЧС4Т, ЧС8);
- от управляемого трехфазного выпрямителя (ЭР2Р, ЭР2Т);
- от импульсного преобразователя напряжения (ЧС2Т, ЧС200, ЧС6, ЧС7).
Схема на рис. 4.16, а описывается следующими уравнениями:
Из этих уравнений получим выражения для тормозных характеристик:

Недостаток — жесткие характеристики при IВ = const.
При снижении скорости и уменьшается тормозная сила В. Для поддержания постоянства тормозной силы при торможении до остановки необходимо автоматическое регулирование тока возбуждения I В .
Противовозбуждение возбудителя.
В целях снижения жесткости тормозных характеристик применяется противовозбуждение возбудителя (рис. 4.17, а). Такая схема применена на электропоездах ЭР22, ЭР2Р, ЭР2Т. Обмотки возбуждения тяговой машины подключены к якорю возбудителя В, который приводится во вращение двигателем ДВ с постоянной скоростью.
Зависимость ЭДС возбудителя Ев от результирующей намагничивающей силы, создаваемой обмотками wн и wc показана на рис. 4.17, б.
Уравнения, определяющие токи в цепях: ![]()

Рис. 4.17. Рекуперативное торможение с противовозбуждением возбудителя: а —электрическая схема; б — ЭДС возбудителя; в — тормозная характеристика

Решая эту систему уравнений, получим выражения для тормозных характеристик:

Как было показано, усиление противовозбуждения улучшает выравнивание нагрузок и уменьшает реакцию на колебания напряжения. Но из полученных формул видно, что увеличение приводит к снижению![]() .
.
Автоматическое регулирование тормозной силы при независимом возбуждении.
Реостатное торможение электровозов с независимым возбуждением тяговых электрических машин (ТЭМ) и с автоматическим регулированием тормозной силы предусмотрено на электровозах переменного тока ВЛ80Т, ВЛ80С, ЧС4Т и ЧС8.
Структурная схема приведена на рис. 4.18:
ТМ — якорь тяговой машины, подключенной к индивидуальному тормозному резистору, ОВ — обмотки возбуждения тяговой машины, МВ — мотор-вентилятор охлаждения тормозного резистора; ТГ—тахогенератор, служащий датчиком скорости; ДТЯ, ДТВ — датчики тока якоря и возбуждения; БУРТ — блок управления реостатным тормозом; КМЭ — контроллер машиниста электровоза; V3, В3 — значения скорости и тормозной силы, заданные контроллером машиниста; VS1, VS2 — тиристоры для регулирования тока возбуждения;![]() ,
,
![]() — углы отпирания тиристоров VS1, VS2.
— углы отпирания тиристоров VS1, VS2.
На электровозах постоянного тока ЧС2Т, ЧС200, ЧС6 и ЧС7 тоже предусмотрено реостатное торможение с независимым возбуждением. Структурная схема отличается от рис. 4.18 тем, что вместо управляемого выпрямителя обмотки возбуждения тяговых машин питаются от импульсного регулятора напряжения.
Тормозные характеристики реостатного тормоза с независимым возбуждением имеют три области ограничений: по току возбуждения Iв, по току якоря и по тормозной силе В. Режимы работы ТЭМ в этих
областях определяются выражениями, приведенными в табл. 4.2.

Рис. 4.18. Структурная схема автоматического регулирования реостатного торможения электровоза переменного тока
Таблица 4.2
Области ограничения тормозных характеристик


Рис. 4.19. Характеристики реостатного торможения с независимым возбуждением на скорости Vнач. Чтобы в поезде не возникло продольных колебаний, темп нарастания тормозной силы должен быть ограничен.
Линия LM показывает увеличение тормозной силы, по мере снижения скорости в соответствии с ограничениями по мощности тормозного резистора. На отрезке ΜΝ действует ограничение по тормозной силе в соответствии с величиной В3, заданной от контроллера машиниста. В точке N при достижении заданной скорости V3 начинается постепенное снижение тормозной силы до достижения равновесия в точке R. Если теперь машинист установит тормозную рукоятку КМЭ в положение V3 = 0, то дальнейшее изменение тормозной силы будет иллюстрироваться линией RNQS на рис. 4.19. В точке S наступит равновесие, и полная остановка поезда на спуске i будет возможна только при торможении состава пневматическими тормозами.
Расчет ограничения тормозных характеристик по сцеплению.
Для анализа удобно представить тормозные характеристики в относительных единицах. В качестве базовых приняты значения тормозной силы Bδ и скорости V δ , соответствующие точке пересечения ограничений по токам якоря Iя maх и возбуждения Iв maх. Магнитный поток ТЭМ при этом равен Фmaх.
![]()
Скорость в относительных единицах![]() .
.
Ограничение по тормозной силе![]() в относительных единицах характеризуется коэффициентом
в относительных единицах характеризуется коэффициентом
![]() , (4.1)
, (4.1)
который зависит от соотношения параметров ТЭМ и вертикальной нагрузки на колесную пару. Обычно д = 0, 6...0, 8.
Ограничения тормозных характеристик в относительных единицах определяются формулами, приведенными в табл. 4.3.
Таблица 4.3 Ограничения относительных тормозных характеристик


Рис. 4.20. Относительные характеристики реостатного торможения с независимым возбуждением
Графики относительных характеристик представлены на рис.

Рис. 4.21. Функциональная схема системы автоматического регулирования тормозной силы
4.20. Ограничение по сцеплению на электровозах реализуется системой автоматического регулирования тормозной силы (САРТС) (рис. 4.21). На электровозах указанных ранее серий элементы САРТС отличаются принципом действия и конструктивным исполнением, но алгоритм ограничения тормозной силы у них одинаков.
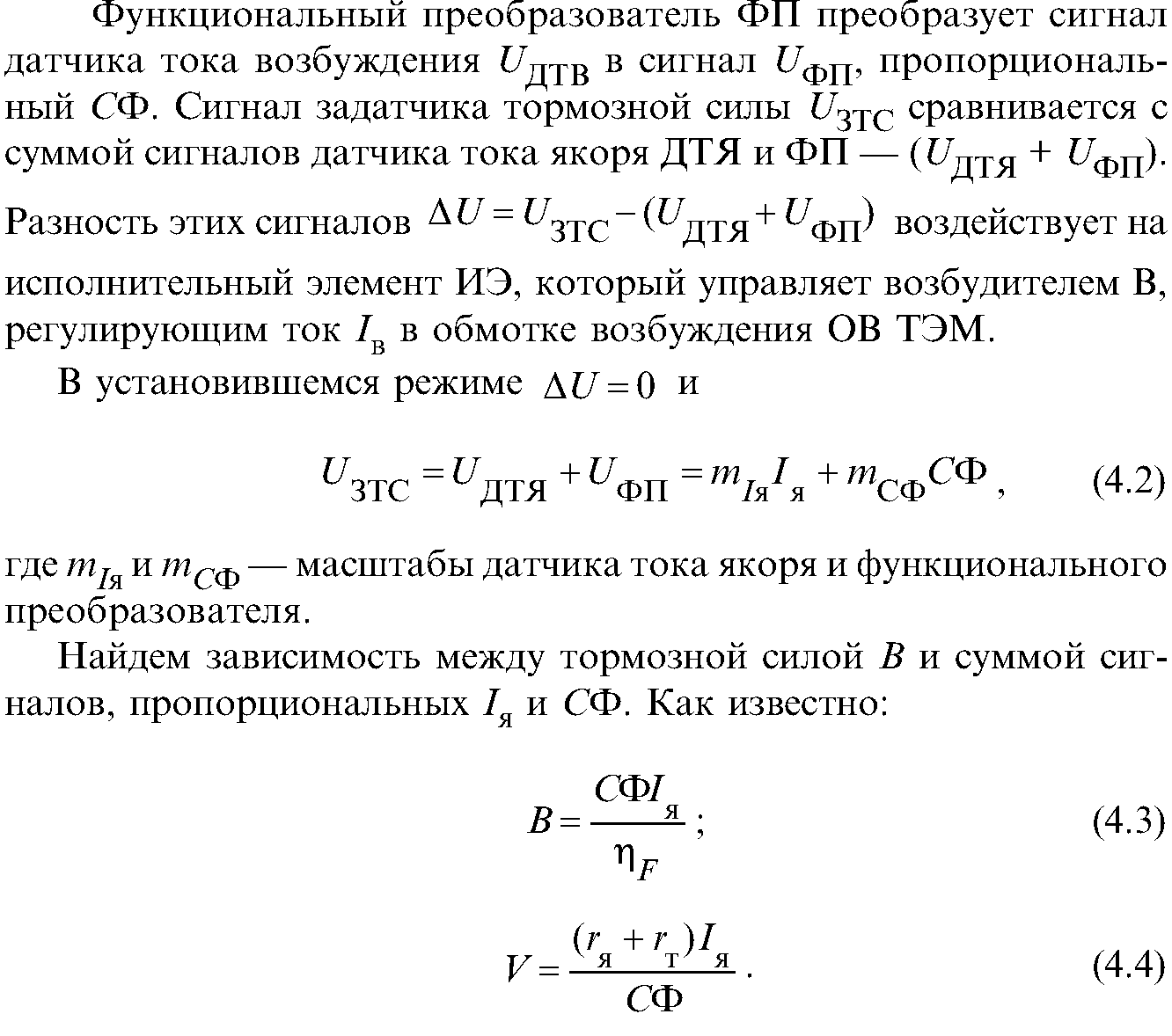
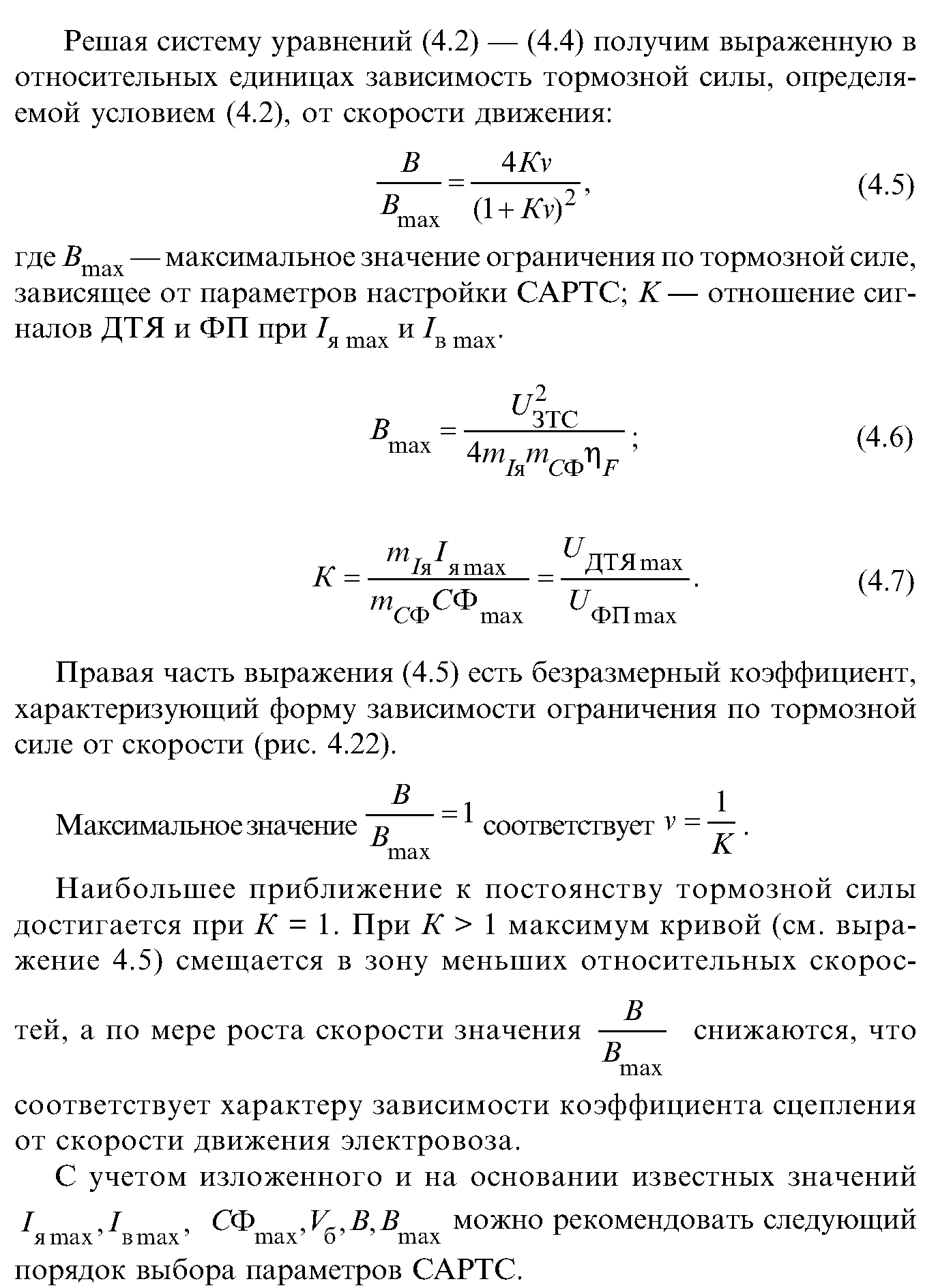
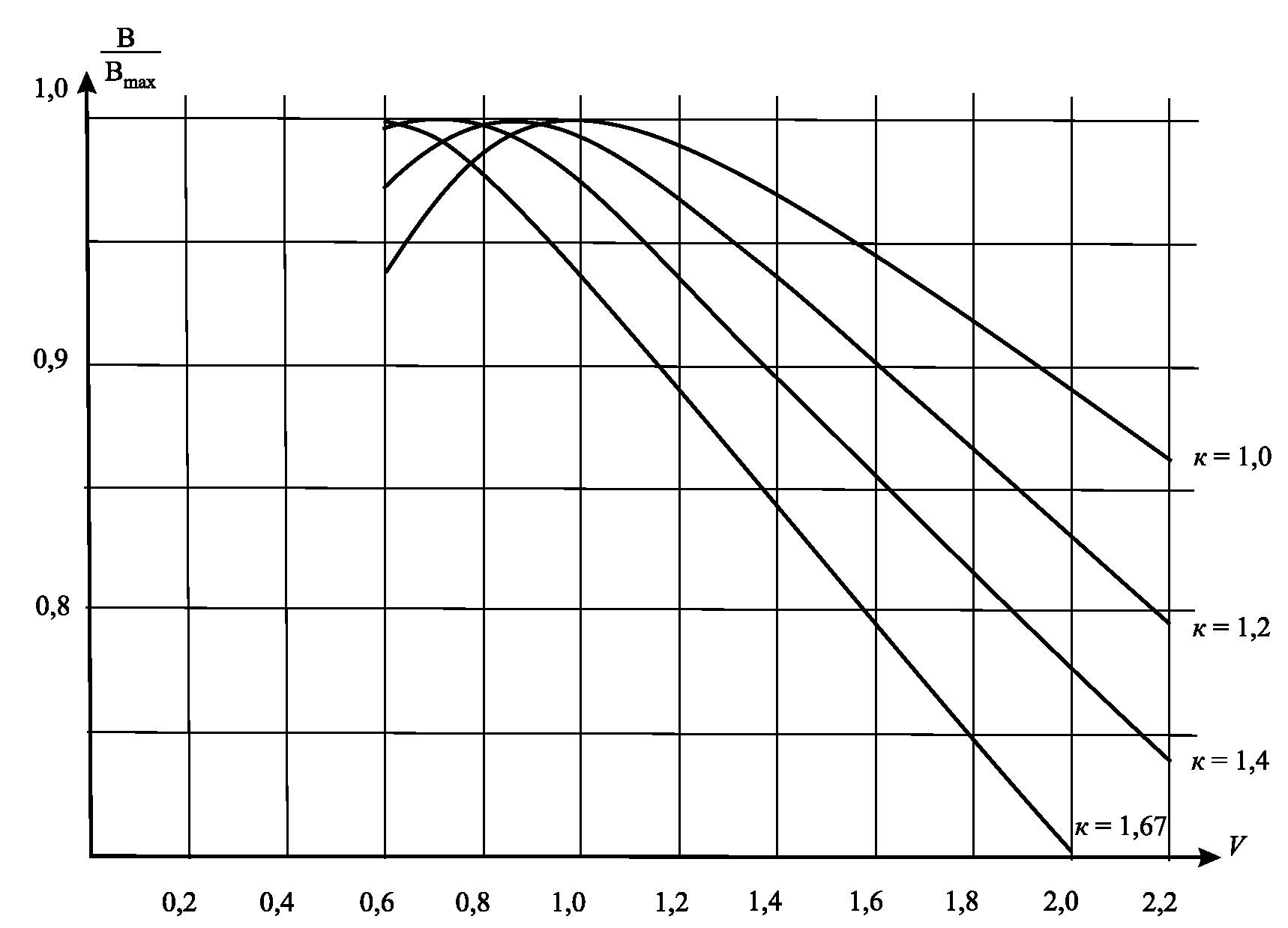
Рис. 4.22. Относительные характеристики ограничения по сцеплению при автоматическом регулировании тормозной силы

Рис. 4.23. Характеристика сцепления при торможении
3. По формуле (4.7) определить требуемое соотношение![]() и тСФ. С учетом формул (4.6) и (4.7) определить параметры настройки САРТС:
и тСФ. С учетом формул (4.6) и (4.7) определить параметры настройки САРТС:![]() .
.
Выводы:
- Ограничения характеристик реостатного торможения с независимым возбуждением по токам якоря и возбуждения, построенные в относительных единицах, совпадают для всех электровозов. Форма кривой ограничения по тормозной силе характеризуется коэффициентом К, равным отношению сигналов ДТЯ и ФП при
 .
. - Минимальная погрешность от замены сигнала тормозной силы суммой сигналов тока и магнитного потока равна нулю и соответствует условию Κν = 1. Максимальная погрешность от такой замены при К = 1 составляет от2до 10 % и определяется отношением максимальной тормозной силы к ее базовому значению.
- Изменяя отношение масштабов сигналов IЯ и СФ можно установить наклон ограничения по тормозной силе, соответствующий наклону характеристики сцепления ψ(V).