СИСТЕМЫ УПРАВЛЕНИЯ ЭПС С БЕСКОЛЛЕКТОРНЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ
Сравнение показателей асинхронных и коллекторных тяговых двигателей
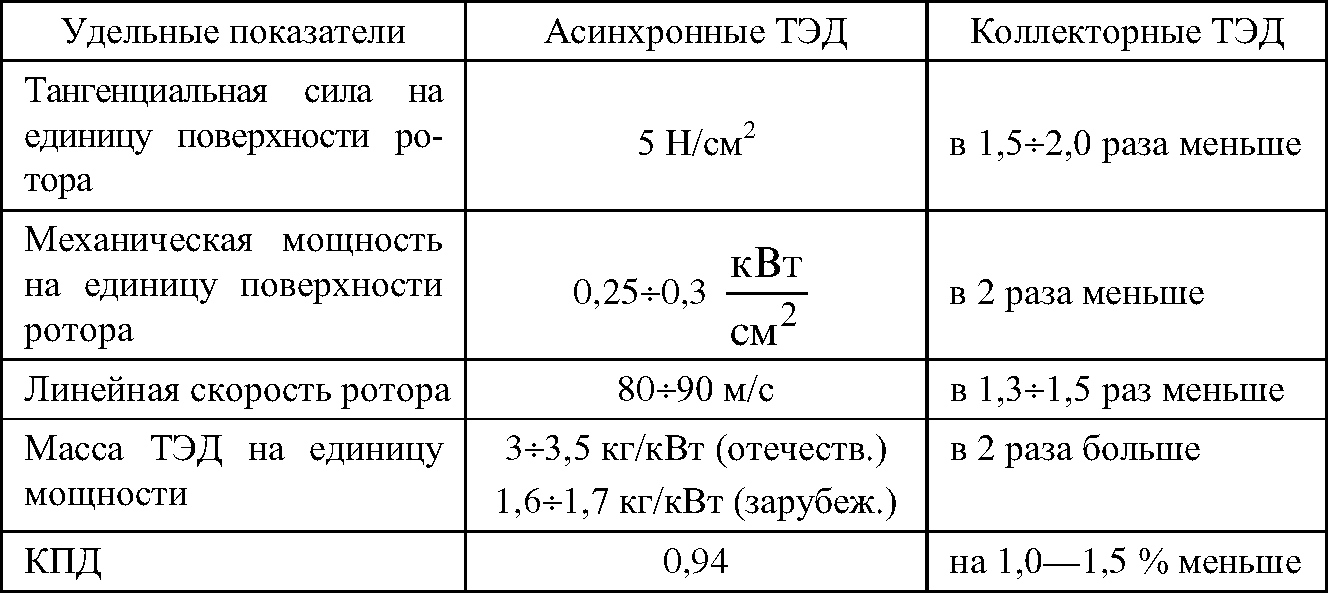
Лучшие показатели асинхронного тягового двигателя (АТД) по сравнению с коллекторным (табл. 5.1) объясняются значительным упрощением конструкции ротора, отсутствием коллектора, возможностью уменьшения воздушного зазора.
Преимущества АТД по сравнению с коллекторными двигателями:
- снижение расхода меди примерно в 2 раза;
- снижение трудоемкости изготовления и затрат на его обслуживание и ремонт;
- возможность выполнения двигателя более высокой мощности в заданных габаритах;
- более высокий КПД;
- уменьшение воздействия тягового подвижного состава на путь вследствие снижения массы двигателя (при равной мощности с коллекторным двигателем);
- упрощение технического обслуживания (ремонта требуют только подшипники и изоляция), снижение эксплуатационных затрат.
Сравнение показателей асинхронных и коллекторных тяговых двигателей
Недостатки.
1) необходимость питания бесколлекторных ТЭД через полупроводниковый преобразователь напряжения и частоты приводит к увеличению стоимости привода и его массогабаритных показателей, необходимо также учитывать потери в преобразователе;
2) несинусоидальность выходного напряжения преобразователя создает дополнительные потери в электрооборудовании, помехи в устройствах связи и автоматики, пульсацию вращающего момента двигателя.
Из табл. 5.2 видно, что отечественные электровозостроители удерживали первенство по ЭПС с асинхронным приводом до 1971 г., а затем уступили его зарубежным фирмам. Аналогичное положение сложилось и по ЭПС с вентильным приводом. Объясняется это достижениями зарубежных производителей полупроводниковых приборов.
5.2 Характеристики асинхронных ТЭД при частотном регулировании
Закон Костенко.
Как известно, частота вращения ротора асинхронного двигателя п2 равна:
![]() (5.1)
(5.1)
и определяется частотой питающего напряжения f 1 , числом пар полюсов р1 и скольжением s.
Таблица 5.2
Хронология бесколлекторного привода
Год | Полупроводниковые приборы | Асинхронный привод | Вентильный привод | ||
СССР и Россия | Зарубежные | СССР и Россия | Зарубежные | ||
1925 | Ионные приборы | Закон Костенко |
|
|
|
1930 |
|
|
| Керн ВВС-предлож. | |
1934 |
|
| Тихменев — модель | Александерсон GEC — опытн. обр. | |
1967 | Однооперационные тиристоры | ВЛ80а-238 макет 4 оси |
| ВЛ80б-216 макет 4 оси |
|
1970 | ЭР-9А макет |
| ВЛ80°-661 опытн. |
| |
1971 | ВЛ80а-751 опытн. |
|
|
| |
1975 |
| Ее 6/6, Е1200 | ВЛ80°-1129, ВЛ80°-1130 |
| |
1976 |
|
| ВЛ83-001 | TGV-A | |
1979 |
| Е120 |
|
| |
1986 | ВЛ86ф-001 | ICE (408 км/ч) |
|
| |
1990 | За рубежом — двухоперационые тиристоры |
|
|
| TGV-A (515 км/ч) |
1995 |
| Evrostar |
|
| |
1998 |
| ETR-500 | ЭП-200 опытн. |
| |
1999 | ЭТ2А ЭП10 опытн. |
|
|
| |
Таким образом, для регулирования скорости движения ЭПС с асинхронным тяговым приводом (АТД) достаточно регулировать частоту/). Сложнее обстоит дело с регулированием силы тяги, которая пропорциональна электромагнитному моменту АТД, определяемому по формуле:


Формулу (5.5) получил в 1925 г. М.П. Костенко, впоследствии профессор Ленинградского Политехнического института, действительный член Академии наук СССР, директор института электромеханики Академии наук СССР.
Закон Костенко справедлив:
- при синусоидальном напряжении;
- при отсутствии насыщения магнитной цепи (пренебрежимо малый ток холостого хода);
- при пренебрежимо малом падении напряжения на r1 и (в цепи статора);
- при постоянстве частоты скольжения
 , которая не превышает критическую.
, которая не превышает критическую.

Рис. 5.1. Характеристики АТД при частотном регулировании
Последнее условие обеспечивает практическое постоянство КПД, cosφ и перегрузочной способности при работе на разных частотах f1. Из формулы (5.5) следует, что для регулирования вращающего момента АТД необходимо одновременно изменять напряжение питания и его частоту/). Режимы частотного регулирования определяются требуемой зависимостью момента М от частоты вращения ротора, пропорциональной частоте/).
Рассмотрим частные случаи закона Костенко для различных условий работы, которые определяются видом нагрузки и наличием ограничений. При тяговой нагрузке, особенно при пуске, желательно иметь постоянный момент на валу ТЭД, не зависящий от частоты вращения.
Графические зависимости для тяговой нагрузки и ограничений по мощности и напряжению изображены на рис. 5.1.
Для мотор-насосов при ламинарном движении жидкости момент должен быть пропорционален частоте. Для мотор-вентиляторов вращающий момент должен быть пропорционален квадрату частоты.
Формулы для частных случаев закона Костенко приведены в табл. 5.3.
Особенности параллельной работы АТД.
Независимо от применяемого способа регулирования частоты f1 справедливо соотношение
![]()
где ω2 — скорость вращения ротора; fs — частота скольжения (частота в обмотке ротора).
Знаки ± соответствуют двигательному и генераторному режимам.
При групповом питании нескольких АТД от одного инвертора f1 будет одинакова для всех АТД. Но, учитывая возможную разницу в диаметрах бандажей 10 мм, разница в скоростях вращения свободно катящихся колесных пар может достигать 1 %.
Частные случаи закона Костенко

Общее регулирование частоты АТД улучшает тяговые свойства электровоза, предотвращая разносное боксование. При этом целесообразно:
- питать АТД каждой тележки от общего автономного инвертора (АИ);
- регулирование частоты f1 производить с измерением частоты вращения колесной пары меньшего диаметра. При этом разница в нагрузках колесных пар получается в 1,5 раза меньше. А в случае срыва сцепления боксовать будет только одна наиболее нагруженная колесная пара.
Выводы:
- Для того чтобы при частотном управлении потери в ТЭД не превысили допустимых значений, необходимо, чтобы частота в роторе
 . При этом скорость электровоза V пропорциональна f1.
. При этом скорость электровоза V пропорциональна f1. - При частотном регулировании используется закон Костенко
![]() .
.
Закон Костенко справедлив при следующих допущениях:
а)![]() ;
;
б) магнитная цепь не насыщена;
в) падение напряжения на активном сопротивлении и индуктивности рассеяния статора пренебрежимо малы;
г) частота скольжения в роторе постоянна и не превышает критической.
- При пуске электровоза требуется выдержать F = const. Это

Структурные схемы силовой цепи ЭПС с асинхронным тяговым приводом
Структура силовой цепи ЭПС с асинхронным тяговым приводом (АТП) зависит от рода тока в контактной сети и используемых типов полупроводниковых преобразователей.
Для ЭПС постоянного тока возможны два варианта структурных схем с автономными инверторами тока (АИТ) и напряжения (АИН) (рис. 5.2, а и 5.2, б).
АИТ позволяет регулировать только частоту f1, а для регулирования напряжения U1 необходимо использовать импульсный регулятор напряжения (ИРН). Для сглаживания напряжения на входе и выходе ИРН используется фильтр (Ф).
Схема рис. 5.2, а реализована на электропоезде ЭТ2А. В схеме рис. 5.2, б регулирование напряжения и частоты f1 производится в автономном инверторе напряжения. Такая схема использована на опытных поездах петербургского метрополитена и трамвая.

Рис. 5.2. Структурные схемы АТП для контактной сети постоянного тока

Рис. 5.3. Структурные схемы АТП для контактной сети переменного тока
На ЭПС переменного тока общим элементом является трансформатор Тр. На ЭПС с АИТ для регулирования напряжения применен управляемый выпрямитель ВУ. На электропоездах ЭН-3 в качестве ВУ использована схема двухзонного фазового регулирования (рис. 5.3, а).
В остальных вариантах структурных схем используется АНН. На первом опытном электровозе с асинхронными двигателями ВЛ80А-751 напряжение неуправляемого выпрямителя В регулировалось контактным переключателем КП (рис. 5.3, б). На электровозе Е1200 германской фирмы AEG был использован неуправляемый выпрямитель с импульсным регулятором напряжения (рис. 5.3, в).
На современном ЭПС наиболее распространен вариант с четырехквадрантным преобразователем 4qS (рис. 5.3, г), примененный на электровозах Е120, скоростном электропоезде ICE, на электровозе ВЛ86Ф-001, а также на многих современных электровозах с асинхронным приводом. 4qS-преобразователь позволяет регулировать напряжение и частоту на АТД, поддерживать коэффициент мощности близким к единице и осуществлять рекуперативное торможение.
Работа различных вариантов структурных схем будет рассмотрена далее.