Универсальные вибропогружатели переменных параметров.

Рис. 106. График изменения величины возмущающей силы вибропогружателя ВП-5 в зависимости от положения эксцентриков
Практическое освоение новых конструкций фундаментов потребовало погружения в грунт железобетонных оболочек различных диаметров и веса. Разные по форме, весу и габаритам погружаемые элементы требуют различных по мощности вибропогружателей. Наличие многотипности вибропогружателей вызывает эксплуатационные затруднения. Возникает необходимость в вибропогружателе, конструкция и параметры которого позволили бы погружать различные по весу, форме и габаритам элементы в грунты различных категорий при одном непременном условии, чтобы потребляемая вибропогружателем мощность на всей глубине погружения не превышала 150% номинальной мощности электродвигателя.
Данные результатов производственного погружения оболочек диаметром 1,55 м в мелкозернистые водонасыщенные пески и опытного погружения железобетонных оболочек диаметром 3 и 5 м в глинистые и глинисто-песчаные грунты привели к выводу, что для эффективного погружения железобетонных оболочек больших диаметров в различные грунты необходимы вибропогружатели, удовлетворяющие следующим требованиям.
- Конструкция вибропогружателя должна давать возможность управлять режимом вибрирования и величиной возмущающей силы. Вибропогружатель должен иметь меняющуюся по величине от максимума до минимума возмущающую силу, грузовой момент, радиус эксцентриков и частоту изменения колебаний. Периодическое изменение параметров вибропогружателя не должно вызывать увеличения потребляемой мощности вибропогружателем больше, чем номинальная мощность его электродвигателя.
- Кинематическая схема вибропогружателя, конструкция его узлов и деталей, конструкция электродвигателя и пускорегулирующей аппаратуры должны обеспечить минимальную мощность в момент запуска вибропогружателя, необходимые скорости погружения и равномерную загрузку электродвигателя на различных глубинах погружения.
- Кинематическая схема и конструкция узлов и деталей вибропогружателя должны обеспечить минимальную затрату мощности, необходимую на преодоление внутренних механических сопротивлений в самом вибропогружателе.
- Конструкция вибропогружателя и его фундамента должна предусматривать возможность сборки вибропогружателей в один общий блок, механическую синхронизацию скорости вращения грузовых валов общего вибропогружателя с величиной возмущающей силы, равной сумме возмущающих сил сблокированных вибропогружателей.
- Вибропогружатель, электродвигатель и пускорегулирующая аппаратура должны быть износоустойчивыми и обеспечивать длительность непрерывного процесса вибрирования в течение 25— 30 мин.
- Конструкция электрооборудования должна обеспечить синхронную работу вибропогружателей.
- Конструкция вибропогружателей должна быть не сложной в изготовлении и удобной в монтаже.
- Относительный вес вибропогружателя должен быть минимальным. На 1 т веса вибропогружателя должно приходиться 15—20 т возмущающей силы, а на 1 т веса эксцентриков должно приходиться не более 3 т веса вибропогружателя.
- Частота изменения направления возмущающей силы должна находиться в пределах ω= 70—100 сек-1.
Для погружения железобетонных оболочек диаметром 5—6 м на глубину 45—50 м строительством разработан метод групповой синхронной работы универсальных вибропогружателей и их конструкция. С этой целью строительством были изготовлены два типа вибропогружателей ВП-УА и ВП-УБ, технические характеристики которых приведены в табл. 18.
Таблица 18

Примечание. Цифры в знаменателе относятся к двухчастотным вибропогружателям, у которых валы с эксцентриками меньших радиусов делают в два раза больше оборотов против валов с эксцентриками больших радиусов.
Первый типа ВП-УА: двух частотный, восьмивальный вибропогружатель с переменными величинами грузового момента, возмущающей силы и приводом изменения скоростей вращения грузовых валов в пределах от 800 до 1010 об/мин.
Второй тип ВП-УБ: одночастотный, двухвальный вибропогружатель с приводом изменения скоростей вращения грузовых валов в пределах от 500 до 800 об/мин с гидравлическими эксцентриками переменного радиуса инерции, изменяющейся величиной грузового момента и возмущающей силы.
Общий вид универсального вибропогружателя первого типа (ВП-УА) представлен на рис. 107.
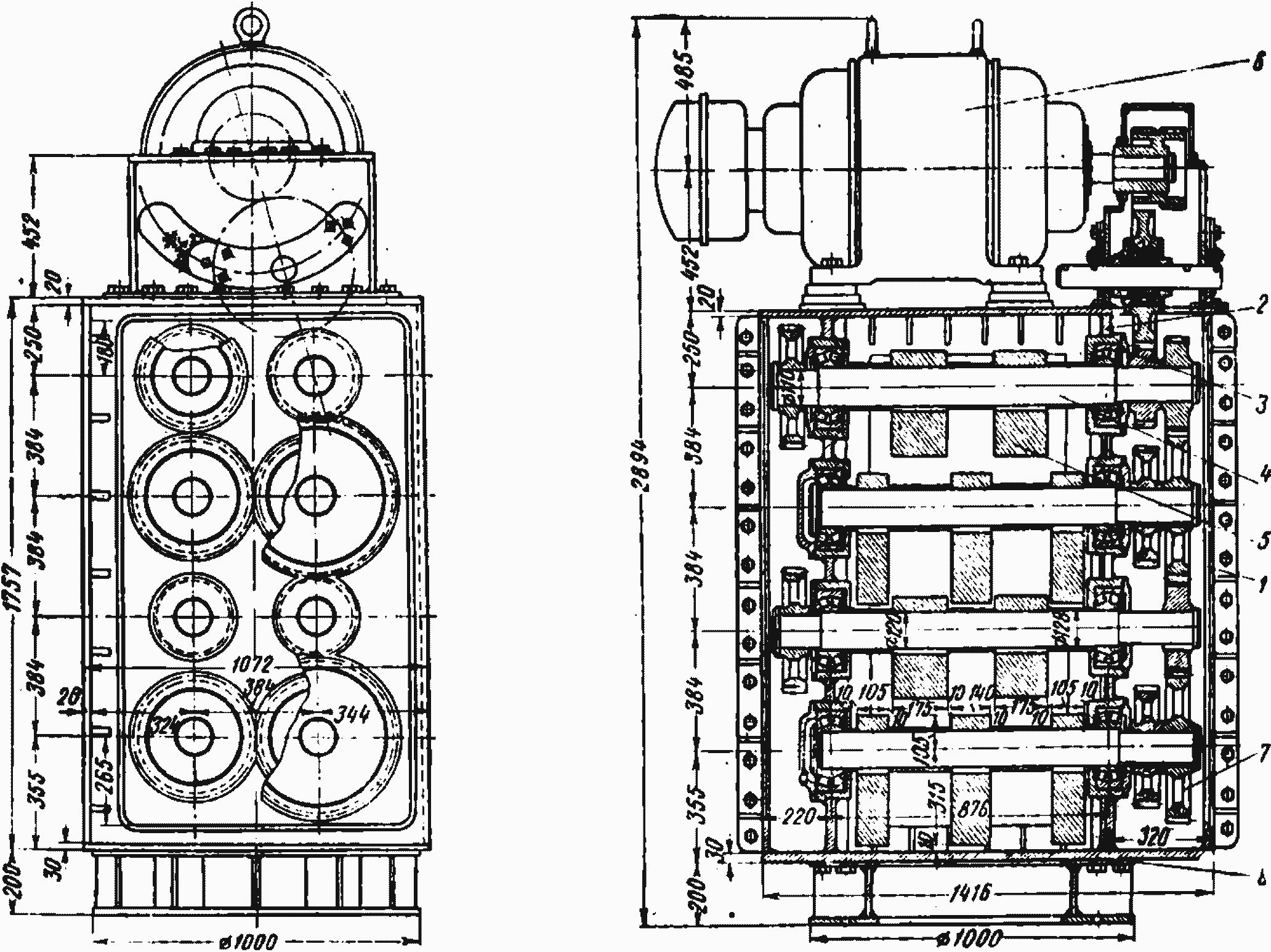
Рис. 107. Универсальный вибропогружатель ВП-УА:
1 — корпус; 2 — переборка; 3 — гнездо подшипника; 4 — грузовой вал; 5 — эксцентрик; 6 — электромотор; 7 — шестерня привода; 8 — фундаментная плита
Вибропогружатель ВП-УА представляет собой низкочастотную восьмивальную вибромашину. Конструкция вибропогружателя позволяет раздельно управлять частотой вибрирования, величиной возмущающей силы и грузового момента.
От вибропогружателей ВП-3, ВП-4 и ВП-5 вибропогружатель ВП-УА отличается тем, что имеет шестерни изменения скорости вращения грузовых валов и эксцентрики, конструкция которых позволяет менять при необходимости величину грузового момента.
К основным узлам вибропогружателя относятся: корпус вибропогружателя; грузовые валы с эксцентриками; цилиндрические шестерни привода и изменения скоростей вращения грузовых валов, фундаментная плита вибропогружателя, электромотор; пускорегулирующая аппаратура.
Вибропогружатель ВП-УА имеет три скорости вращения грузовых валов: первая скорость 400—800 об/мин, вторая скорость 450—900 об/мин и третья скорость — 505—1010 об/мин. Изменение скоростей вращения грузовых валов происходит за счет переключения промежуточной шестерни и зацепления ее с одной из трех шестерен грузовых валов верхнего ряда.
Конструкция механизма переключения скоростей у вибропогружателя ВП-УА выполнена в двух вариантах. Общий вид механизма переключения скоростей первого варианта представлен на рис. 108.

Рис. 108. Механизм переключения скорости вращения грузовых валов вибропогружателя ВП-УА (первый вариант):
1 — кожух шестерен; 2 — скользящая ось; 3 — промежуточная шестерня; 4 — фундаментная планка; 5 — лекальная планка
В кожухе шестерен 1 смонтирована на скользящей оси 2 на двух шарикоподшипниках промежуточная шестерня 3. Скользящая ось фиксируется в двух расположенных по обе стороны кожуха фундаментных и лекальных планках. Фундаментные планки 4 к лекальным 5 крепятся шестью болтами каждая. Для переключения скоростей вращения грузовых валов необходимо каждый раз снимать болты крепления фундаментных планок.
Порядок переключения скоростей следующий. Освобожденные от болтов фундаментные планки вместе со скользящей осью и промежуточной шестерней перемещаются по отверстию лекальных планок вправо или влево (в зависимости от того, на какую скорость нужно переключить вибропогружатель) до полного зацепления зубьев шестерен. После этого фундаментная планка снова крепится болтами к лекальной.

Рис. 109. Универсальный вибропогружатель ВП-УБ:
1 — корпус вибропогружателя; 2 — гнезда подшипников; 3 — грузовой вал; 4 — раздвижной гидравлический эксцентрик; 5 —шестерни приводов; 6 — трубка для подачи масла в эксцентрики
Изменение скоростей вращения грузовых валов происходит за счет переключения промежуточной шестерни и зацепления ее с одной из трех шестерен двух грузовых валов верхнего ряда. Изменением скорости вращения грузовых валов в пределах 800—1 010 об/мин, а радиуса инерции с 12 до 14,5 см можно развивать в вибропогружателе ВП-УА возмущающую силу в пределах от 100 до 160 т, а величину грузового момента повысить с 35 200 до 39 000 кгсм.
Изменение частоты вибрирования, величины грузового момента и возмущающей силы вибропогружателя необходимо для ликвидации случаев заклинивания вибромассы грунтом.
На строительстве моста через р. Янцзы в 1956 г. был разработан и осуществлен метод групповой синхронной работы нескольких универсальных вибропогружателей типа ВП-УА. Принципом работы по этому методу является создание (группой синхронно работающих вибропогружателей) вертикально направленных по оси погружаемой оболочки вынужденных колебаний .вибросистемы. Для проведения опытного погружения пятиметровой железобетонной оболочки весом 220 т на глубину 32 м в плотные коричневые глины были использованы два универсальных вибропогружателя ВП-УА.
Для этой цели два вибропогружателя одинаковых характеристик с электродвигателями серии АМ-6, одинаковых мощности и числа оборотов, наглухо связанные между собой шестеренчатой передачей и болтовой связью, устанавливались на общем металлическом фундаменте и жестко крепились к погружаемой оболочке.
Электродвигатели вибропогружателей соединялись между собой по схеме электрического вала, а вибропогружатели парой цилиндрических шестерен.
Каждый вибропогружатель создавал свою вертикально направленную возмущающую силу, действующую по оси, отстоящей на определенном расстоянии от вертикальной оси вибросистемы. В данном случае суммарную возмущающую силу системы можно получить при условии, если угол поворота эксцентриков обоих вибропогружателей на всем протяжении вибрирования будет постоянным, а угловая скорость вращения грузовых валов строго одинакова. Это в данной системе было достигнуто электромеханическим путем.
Электродвигатели вибропогружателей соединялись между собой по схеме электрического вала, а вибропогружатель механической шестеренчатой связью для того, чтобы электродвигатели во время остановки и последующего запуска не выходили из синхронизации, а эксцентрики принимали строго одинаковое положение.
Конструкция универсального вибропогружателя ВП-УБ представляет собой одночастотную двухвальную вибромашину с приводом изменения скорости вращения грузовых валов и гидравлическими эксцентриками переменного радиуса инерции (рис. 109).
К основным узлам вибропогружателя относятся: корпус вибропогружателя, грузовые валы, гидравлические эксцентрики с переменным радиусом инерции, гидравлическая система управления величиной грузового момента; шестерни привода грузовых валов; электродвигатели вибропогружателя; пускорегулирующая аппаратура для синхронно работающих электродвигателей.
В данном типе вибропогружателя применен гидравлический эксцентрик с изменяющимся радиусом инерции.' Конструкция эксцентрика позволяет менять радиус инерции в пределах от 16,5 до 26,2 см.
Гидравлический эксцентрик вибропогружателя (рис. 110) сосостоит из неподвижного, жестко закрепленного полудиска 1. Неподвижный полудиск в своем теле имеет два цилиндра. Подвижная часть 2 имеет два поршня, входящих в цилиндры неподвижного полудиска. К подвижной части десятью болтами крепятся две щеки 3.
Изменение радиуса инерции эксцентрика достигается следующим образом: масло по просверленным отверстиям в грузовом валу и неподвижном полудиске попадает в его цилиндры. Давлением масла поршни подвижной части выдвигаются из цилиндра, перемещая подвижную часть вверх к оси вращения.
При необходимости увеличить радиус эксцентрика в момент работы вибропогружателя достаточно из масляной магистрали выпустить необходимое количество масла, и центробежные силы эксцентрика переместят подвижную часть в крайнее нижнее положение.
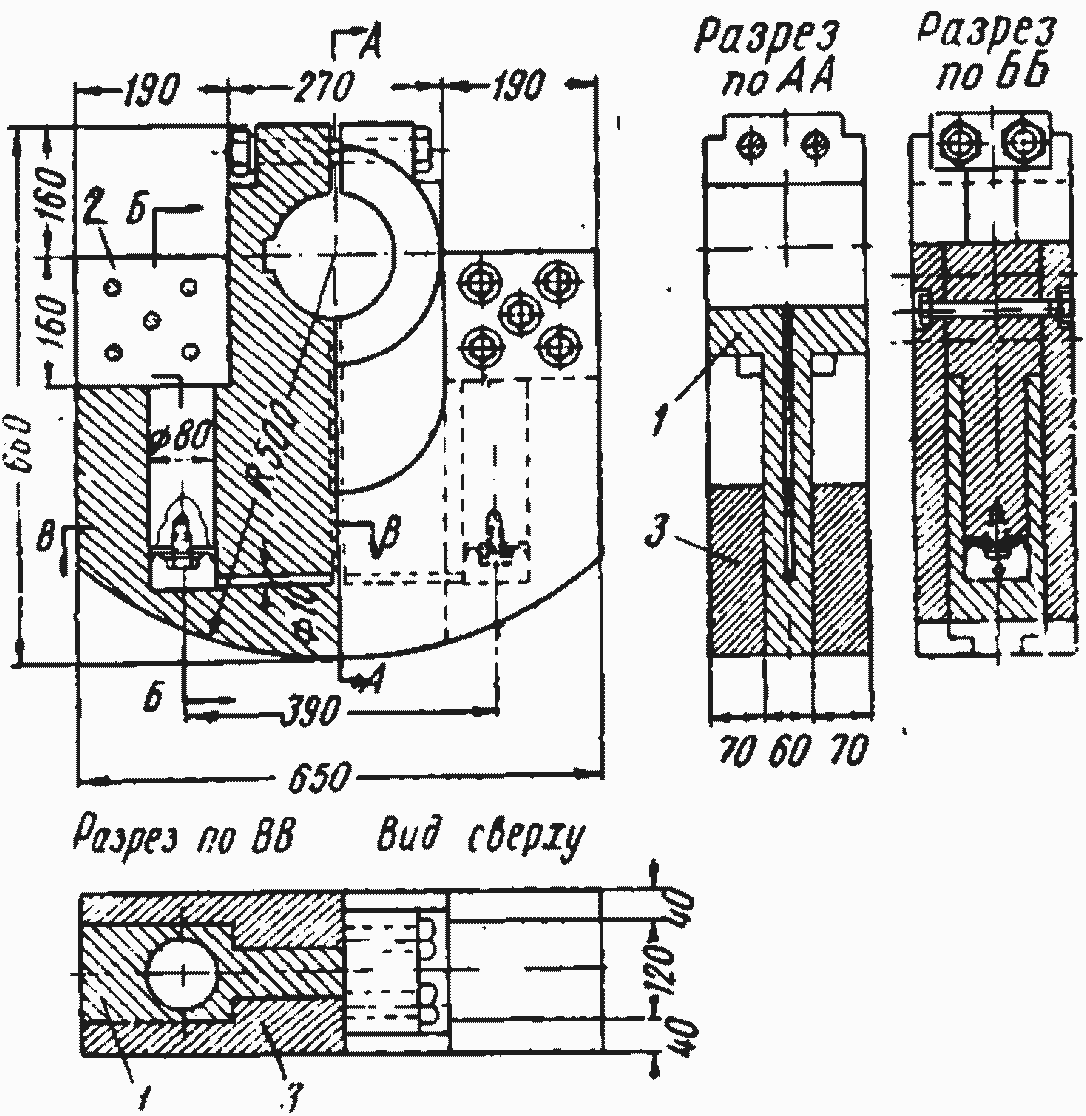
Рис. 110. Раздвижной гидравлический эксцентрик вибропогружателя ВП-УБ: 1 — неподвижный полудиск; 2 — подвижная часть; 3 — щеки подвижной части эксцентрика
Гидравлическая система управления величиной грузового момента вибропогружателя ВП-УБ состоит из насоса, двух вращающихся сальников, вмонтированных в торец грузовых валов, масляной магистрали из медных трубок и резервуара для масла.
Общий вид вращающегося сальника представлен на рис. 111.
Два электромотора вибропогружателя типа АМ-6 представляют собой асинхронные двигатели с фазовым ротором мощностью 155 кВт при 1 450 об/мин. Пускорегулирующая аппаратура позволяет моторам работать синхронно и регулировать обороты мотора в момент запуска в шести диапазонах в пределах от 500 до 1 450 об/мин.
Изменяя скорости вращения грузовых валов в пределах 500— 800 об/мин и радиус инерции от 15,5 до 26,2 см, вибропогружателем ВП-УБ можно развивать возмущающую силу от 120 до 416 т, а величину грузового момента повышать с 33 000 до 54 000 кгсм.
Приводными двигателями вибропогружателей ВП-3, ВП-4, ВП-5 и ВП-УА являются двигатели серии АМ-6. Этот тип двигателей конструктивно, а также по режиму работы отличается от электродвигателей серии МТ, до сих пор применяющихся на вибропогружателях ВП-1, ВП-2, ВП-3, 104 и ВПП-2. Чтобы можно было судить о достоинствах и недостатках электродвигателей серии АМ-.6 и МТ, в табл. 19 приводятся некоторые их сравнительные параметры.

Рис. 111. Вращающийся сальник:
/ — корпус сальника; 2 — подвижной штуцер; 3 и 4 — крышки;
/ 5 — уплотнительные кольца; 6 — подшипник
Таблица 19
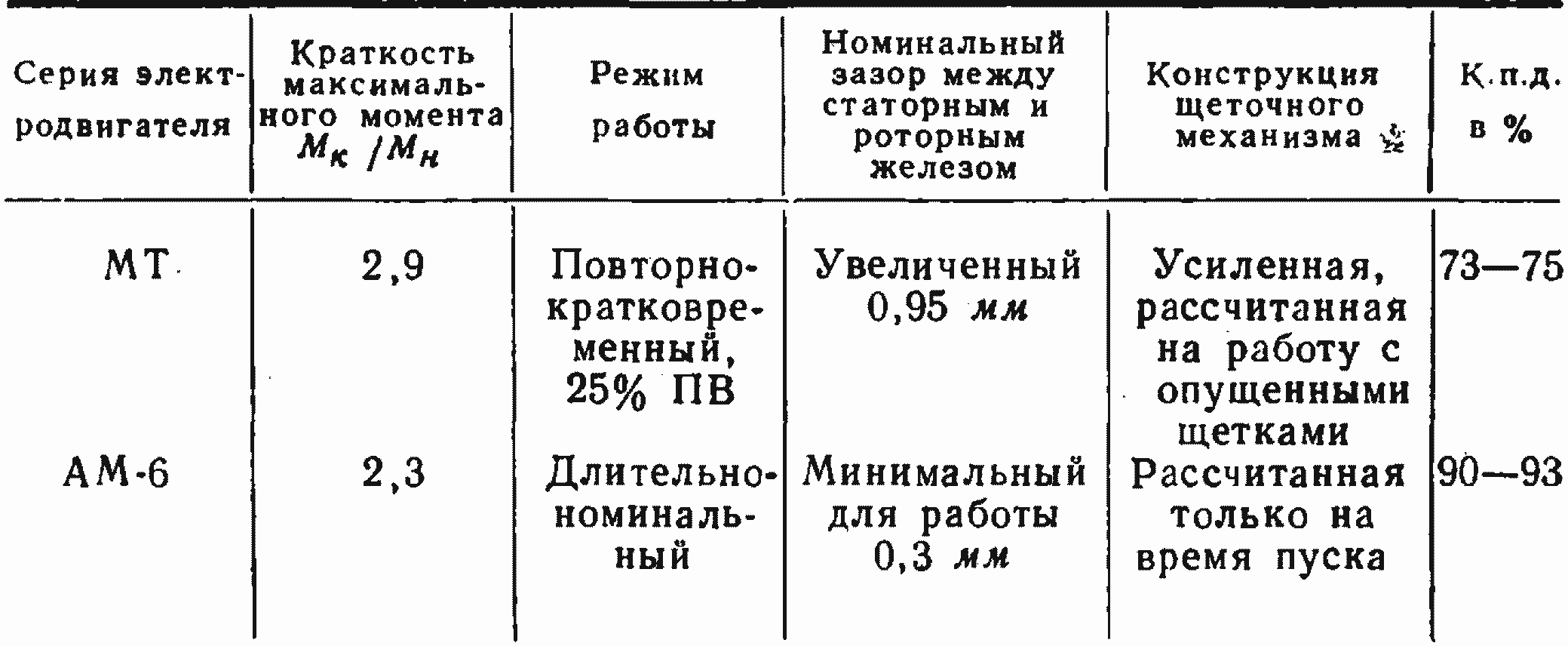
Приведенные в табл. 19 параметры взяты для двигателей МТ-72-10 и АМ-6-117-6. Из характеристик двигателей той или другой серии видно, что отношение критического момента к номинальному у серии МТ больше, чем у АМ-6. Перегрузка двигателей низкочастотного вибропогружателя даже при больших скоростях погружения более 6 м/мин не превышает 1,5—1,7 номинальной мощности. Поэтому перегрузочная способность электродвигателей серии АМ-6 достаточна.
Двигатель серии АМ-6 рассчитан на работу в продолжительнономинальном режиме. Двигатели серии МТ рассчитаны на повторно-кратковременный режим с 25% ПВ. Это обстоятельство дает возможность период непрерывной работы вибропогружателя с двигателем серии АМ-6 увеличить в 12—15 раз по сравнению с вибропогружателем, имеющим двигатель МТ.
Зазор между статорным и роторным железом у двигателей АМ-6 значительно меньше, чем у двигателей серии МТ, поэтому двигатели серии МТ допускают большую степень износа подшипников.
Конструкция двигателей АМ-6 перед установкой их в качестве приводных двигателей вибропогружателей модернизировалась, в частности на всех приводных двигателях вибропогружателей ручное приспособление для замыкания колец и подъема щеток было заменено автоматическим.
Практика эксплуатации вибропогружателя ВП-4 на строительстве показала, что его приводной двигатель серии АМ-6-128-8 мощностью 155 кВт безаварийно проработал 500 ч. Длительность непрерывной работы при погружении оболочек в среднем составляла 30—40 мин. Замена щеток в среднем производилась через 50—60 ч работы. После 500-часовой работы на электродвигателе были заменены изношенные подшипники и он вновь был пущен в эксплуатацию.
При разработке и изготовлении пускорегулирующей аппаратуры было обращено внимание на устранение недостатков, которые имелись в применявшейся схеме электропривода вибропогружателей ВП-1, ВП-2, ВП-3 и др.
Эффективное погружение сборных железобетонных оболочек группой вибропогружателей возможно при синхронной работе их электродвигателей. Синхронное вращение приводных асинхронных электродвигателей осуществлялось по схеме электрического вала. Ввиду того что разность моментов сопротивления на валах электродвигателей однотипных вибропогружателей не превышает 12—15%, схема электрического вала применялась без уравнительных машин.
При разработке схемы и конструкции электрической части вибропогружателя ВП-УА, так же как и при разработке конструкции самого вибропогружателя, особое внимание обращалось на универсальность аппаратуры, которая должна заключаться в возможности управления вибропогружателями при их одиночной работе и в быстром объединении отдельных пультов управления по схеме электрического вала при групповой работе вибропогружателей ВП-УА.