ВОЗМОЖНОСТИ ИСПОЛЬЗОВАНИЯ РАДИОТЕХНИЧЕСКИХ ИЗМЕРИТЕЛЕЙ ПАРАМЕТРОВ ДВИЖЕНИЯ В СИСТЕМАХ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Получившие распространение на сети дорог СССР системы автоблокировки (АБ) и авторегулировки (АР) обладают ограниченными возможностями автоматизированного управления движением поездов. Это связано с тем, что такие системы не позволяют мгновенно определить координаты поезда на перегоне.
Создание мобильного измерителя параметров движения подвижного состава делает возможным разработку принципиально новой системы интервального и диспетчерского регулирования движением поездов с использованием радиоканалов.
Разработка принципов построения и радиотехнического обеспечения системы интервального регулирования движением поездов с применением радиоканалов издавна привлекала внимание исследователей. Еще в начале 60-х годов учеными А. М. Брылеевым, В. М. Лисенковым, И. Е. Дмитренко, Ю. В. Вавановым, Д. К. Пугиным и др. была обоснована целесообразность и возможность технической реализации подобной системы [59] — [61]. Для реализации автоматического управления движением поездов (АУДП), помимо разработки мобильного измерителя параметров движения, необходимо создание надежного помехоустойчивого двустороннего канала связи между локомотивом и диспетчером.
На основании показаний локомотивного измерителя о скорости и координате каждого поезда, передаваемых по радиоканалу диспетчеру, в центре управления на основе оценки текущей информации каждому поезду задается режим движения с учетом профиля пути, расстояния до впереди идущего поезда или с учетом расстояния до входного сигнала станции и его показания. Поставленные задачи могут решаться в центре управления с помощью ЭВМ. С этой целью в ЭВМ вводятся постоянные для каждого поезда параметры: номер, масса, длина, программа движения и т. д.
Поскольку тип канала связи определяется используемой системой поездной радиосвязи, возможен лишь циклический опрос центром управления всех поездов, находящихся в пределах диспетчерского круга. Следует иметь в виду, что длительность цикла опроса не должна превышать время, за которое поезд, двигаясь с максимальной скоростью, пройдет путь, превышающий длину наименьшего блок-участка.
При небольших размерах движения использование даже Дуплексного канала не позволит осуществить оперативное управление движением поездов ввиду недостаточной пропускной способности радиоканала. В этих случаях более целесообразным является вариант, при котором информация о параметpax движения будет передаваться не по запросу от центра управления, а по команде от напольного датчика.
При проследовании локомотивом напольного датчика решается ряд задач. В этом месте (положение которого точно известно) может: осуществляться коррекция бортового измерителя пути; подаваться команда от напольного датчика на (юрт локомотива для переключения бортовой радиостанции в режим передачи информации о параметрах движения в центр управления, выбираться требуемая несущая частота.
При переходе локомотива из одного диспетчерского круга в другой должно осуществляться автоматическое переключение рабочих групп частот бортовых радиостанций, которое может происходить подачей команды от внешних устройств.
Важнейшим средством увеличения пропускной способности линии является сокращение интервалов попутного следования поездов, позволяющее увеличить размеры движения на перегонах. С этой целью представляет интерес рассмотрение вопроса организации движения одиночных поездов, следующих друг за другом с минимально допустимым безопасным интервалом в так называемых „блоках”. Это особенно важно в районах, не оборудованных автоблокировкой, или на участках с ЛБ при проведении ремонтно-восстановительных работ.
В этом случае система управления движением поездов в „блоках” должна обеспечивать „гибкое” ведение поездов с минимальным интервалом попутного следования при безусловном выполнении требований безопасности движения. Вместе с тем следует отметить, что существующие устройства железнодорожной автоматики, обеспечивая высокую степень безопасности движения поездов, в то же время не позволяют организовать движение поездов с минимально допустимым безопасным интервалом во всем диапазоне скоростей движения.
Наиболее целесообразным в этих условиях является построение такой системы регулирования, которая бы, сочетая все достоинства существующих систем, обеспечивала движение каждого поезда с учетом всевозможных изменений характера движения впереди идущего состава. Это предполагает исключение деления железнодорожного пути на блок-участки.
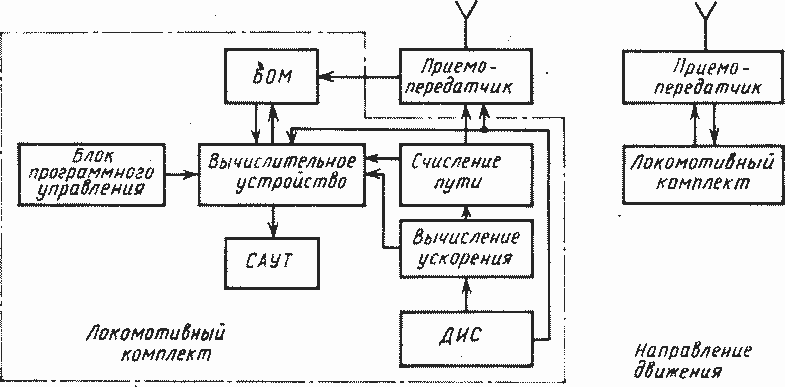
Рис. 2.22. Структурная схема радиотехнической системы интервального регулирования движением поездов в "блоках"
В основе построения радиотехнической системы управления движением поездов в „блоках” (рис. 2.22) лежит автоматическое локомотивное устройство Счисления пути, позволяющее с высокой точностью вычислять координату местоположения поезда на основании показаний допплеровского измерителя скорости ДИС и устройство Вычисления ускорения.
Для обмена информацией о характере и параметрах движения между соседними поездами необходимо организовать обмен информации с помощью Приемопередатчика, установленного на каждом локомотиве. Принятая информация поступает в Вычислительное устройство, в котором сравниваются параметры движения данною локомотива с впереди идущим и выдается команда на систему автоматического управления тормозами (САУТ).
Для управления движением поезда на основании измеренных параметров движения, данных о ходовых характеристиках поезда (число вагонов, тип используемых подшипников и т. п.), профиля пути на всем участке следования, тяговых характеристиках поезда (масса, тип локомотива, длина состава и т. п.) предусмотрен Блок программного управления. Указанные данные определяют тормозной путь поезда на каждом конкретном участке. При изменении параметров движения впереди идущего поезда полученные данные должны непрерывно сравниваться в Вычислительном устройстве.
В качестве блока программного управления может использоваться существующая система автоматического управления движением САУ.
Рациональные режимы движения закладываются в САУ в виде заранее рассчитанной программы движения, так что в каждой точке пути известна программная скорость движения поезда. В зависимости от конкретных условий движения САУ корректирует режим движения поезда. Вместе с гем система САУ не подменяет машиниста, а лишь облегчает его работу, выбирая наилучший и наиболее рациональный режим движения. Контроль за действием САУ возлагается на локомотивную бригаду, которая при необходимости берет на себя управление поездом.
Важное место в радиотехнической системе управления движением поездов должен занимать блок обнаружения маневра впереди идущего поезда БОМ. Блок обнаружения маневра БОМ предназначен для определения изменения характера движения впереди идущего поезда, которое связано с опасным сближением попутно следующих поездов.
Таким образом, для устранения возможности возникновения экстремальных ситуаций наряду с измерением пройденного пути определяется характер движения поезда - ускоренное или замедленное; с помощью БОМ обнаруживаются опасные маневры впереди идущего поезда и при необходимости осуществляются прицельное торможение или разгон с учетом профиля пути, тяговых и ходовых характеристик попутно следующих поездов.
Регулирование движения группы поездов, следующих в общем „пакете”, в соответствии с заложенной программой необходимо из-за отличия реальных ходовых и тяговых характеристик, входящих в „пакет” поездов от расчетных, а также из-за действия внешних возмущений и ошибок измерительных приборов. В результате этого реальные параметры движения отклоняются от программных значений. Основная задача регулирования поездов, движущихся в "пакете", заключается в обеспечении безопасности движения путем поддержания интервалов между поездами в заданных пределах. Управляющее воздействие должно формироваться на основе оценок отклонений параметров движения поездов от заданных значений в процессе движения. При этом должны решаться две задачи: прогнозирование и обнаружение аварийных ситуаций между соседними поездами; выдача рекомендаций машинисту локомотива в той или иной форме по устранению опасной ситуации и посылка команд на автоматические устройства предотвращения столкновений, например, САУТ.
Для решения поставленных задач может использоваться система дистанционною управления локомотивом в целом и только тормозным краном машиниста.
Для организации канала связи между соседними локомотивами можно использовать полукомплекты двухдиапазонных радиостанций типа ЖР-УК-ЛП. Для обмена информацией закрепляются каналы КВ или УКВ диапазонов, а каналы других диапазонов используются в системе поездной радиосвязи.
Вопрос электромагнитной совместимости систем обмена информацией между несколькими поездами в группе может быть решен путем адресации. Устранение влияний между поездами, движущимися навстречу друг другу, может быть осуществлено путем использования частотного разноса.
Возможности радиотехнической системы интервального регулирования (базирующейся на разработанном ВНИИЖТом мобильном измерителе параметров движения и принятой в МПС системе „Транспорт”) описаны в [62-64]. Показано, что минимально Допустимый безопасный временной интервал между поездами, следующими в группе, который может быть достигнут при использовании радиотехнической системы интервального регулирования, не превышает 1 мин.