ГЛАВА 3
РАДИОТЕХНИЧЕСКИЕ УСТРОЙСТВА ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ НА ЖЕЛЕЗНОДОРОЖНОМ ТРАНСПОРТЕ
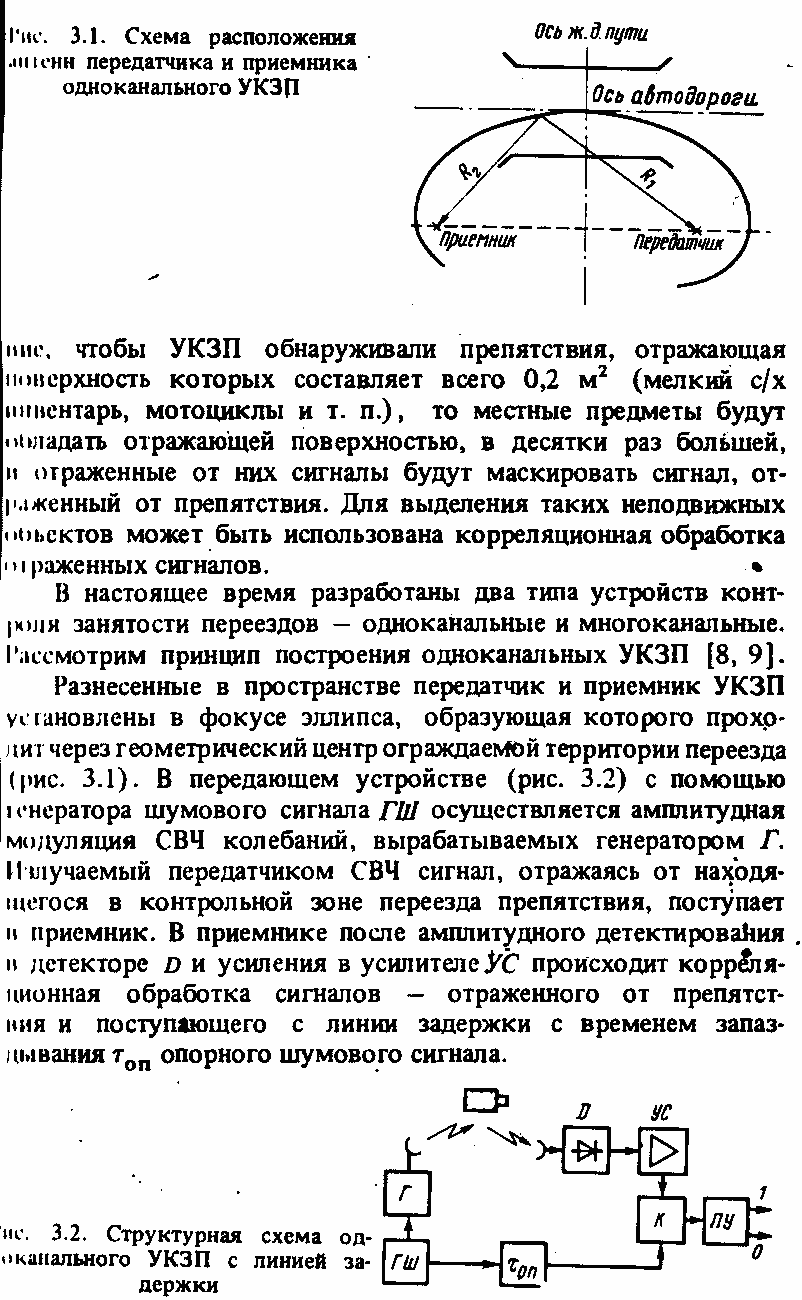
3.1. ОБНАРУЖЕНИЕ ПРЕПЯТСТВИЙ НА ЖЕЛЕЗНОДОРОЖНЫХ ПЕРЕЕЗДАХ
Рост грузопотоков и скоростей движения поездов выдвигает повышенные требования, предъявляемые к устройствам, обеспечивающим безопасность движения, и особенно на железнодорожных переездах. По статистике железнодорожных происшествий в различных странах около 60% всех аварий на железных дорогах происходит на переездах.
Наибольшее распространение получили системы звуковой и световой (проблесковой) автоматической переездной сигнализации. На переездах применяются автоматические шлагбаумы, а на охраняемых переездах устанавливают заградительные светофоры, управляет которыми обслуживающий персонал.
Тем не менее из-за недисциплинированности, невнимательности водителей безрельсового транспорта число аварий даже на оборудованных переездах остается большим. Особенно нелико их число на неохраняемых переездах.
Недостатком существующих систем ограждения переездов является то, что они предназначаются для предупреждения водителей безрельсового транспорта о приближающихся поездах и не имеют обратного канала передачи информации о состоянии переездов на локомотивы, т. е. не решена задача автоматизации процесса управления заградительной сигнализацией. В связи с этим в ряде стран ведутся разработки новых средств ограждения переездов, использующих различные физические принципы.
В МИИТе разработана новая система автоматического управления заградительной сигнализацией (САУ ЗС), предназначенная для автоматической подачи команды машинисту локомотива о состоянии переезда. В отличие от существующих система обладает большими функциональными возможностями, обеспечивает более высокую точность и достоверность обнаружения препятствий, представляющих опасность для движения железнодорожного транспорта, на строго ограниченной площади переезда.
Основой САУ ЗС являются устройства контроля занятости переездов (УКЗП). Эти устройства должны с высокой точностью обнаруживать все препятствия, находящиеся в опасной зоне переезда и угрожающие движению поездов. Вместе с тем УКЗП не должны подавать команды на включение заградительной сигнализации при нахождении любого препятствия вне опасной зоны переезда, ибо в противном случае это будет приводить к ошибочным остановкам поездов, снижению эффективности технологической работы железнодорожного транспорта. Решение этой задачи связано с разработкой таких УКЗП, которые обладают высокой точностью фиксации границ контролируемой площади переездов. УКЗП должны обнаруживать любые препятствия вне зависимости от их массы, габаритных размеров, материала, из которого они изготовлены, в любое время года и суток, при любых метеоусловиях.
Как показали многочисленные исследования, проводимые у нас в стране и за рубежом [9, 55], наиболее перспективными являются УКЗП, реализующие радиотехнические принципы. Такие УКЗП представляют собой портативную радиолокационную станцию, установленную в непосредственной близости от переезда.
Небольшое расстояние между УКЗП и переездом, ограниченная площадь обзора и относительно большое время, в течение которого может происходить анализ отраженных от препятствий сигналов, позволяют существенно упростить схему и конструкцию УКЗП, сделать их пригодными даже для установки на неохраняемых переездах с малой интенсивностью движения.
Основная трудность при создании УКЗП заключается в том, что наибольшую угрозу для поездов представляют неподвижные препятствия с весьма малой эффективной отражающей площадью рассеяния радиоволн (с/х инвентарь, развалившийся груз и т. п.), которые маскируются многочисленными местными предметами, обладающими хорошими отражающими способностями (рельсы, опоры контактной сети, зеленые насаждения). УКЗП должны не только обнаруживать препятствия в пределах переезда, но и непрерывно анализировать их состояние (препятствие может медленно перемещаться и покинуть пределы опасной зоны до вступления на нее поезда). Такие препятствия могут быть обнаружены с помощью допплеровского эффекта и корреляционной обработки отраженных сигналов. Передатчик и приемник УКЗП размещают по разные стороны железнодорожного полотна. Передатчик излучает электромагнитные волны СВЧ диапазона и охватывает всю территорию переезда, в пределах которой не должны находиться посторонние предметы. Сюда же направлена и приемная антенна УКЗП. При наличии на переезде каких-либо объектов, представляющих опасность для движения поездов, в приемник поступают отраженные от них сигналы, которые сравниваются с сигналами передатчика. Эхо-сигналы, отразившиеся от подвижных объектов, будут иметь допплеровское смещение частоты, которое используется для выявления препятствий. Селекцию допплеровских сигналов реализуют даже для малоподвижных объектов, скорость которых составляет 3—4 км/ч; например, при длине волны λ=3 см смещение частоты fдоп=2ν/λ≈66 Гц. Такая разность частот излучаемых и отраженных сигналов легко обнаруживается с помощью когерентных УКЗП.
Более сложной задачей является выявление неподвижного объекта, находящегося на переезде. Этому препятствует отражение сигналов от местных предметов, размеры которых соизмеримы с обнаруживаемым препятствием. Если поставить условие

Наиболее предпочтительными являются шумоподобные или шумовые сигналы [8, 9, 10]. Очевидно, чем меньше продольные размеры охраняемой территории переезда, тем широкополоснее должен быть зондирующий сигнал. Поскольку в УКЗП происходит корреляционная обработка сигнала с участием порогового исполнительного элемента, необходимо в качестве зондирующего использовать сигналы, автокорреляционная функция которых В(т) была бы как можно ближе к прямоугольной. Указанным свойством, учитывая простоту реализации формирования зондирующего сигнала, в наибольшей степени удовлетворяют ограниченный по полосе белый шум

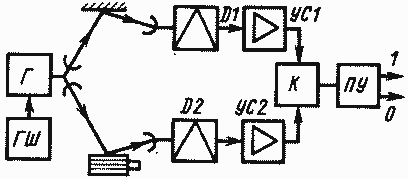
Основные трудности в построении УКЗП связаны с формированием зондирующего сигнала, представляющего собой СВЧ сигнал, про модулированный по амплитуде исходным шумом. Это связано с нелинейностью модуляционных характеристик тракта передачи и возникающими в связи с этим ошибками обнаружения, поскольку в приемнике вычисляется корреляционная функция между продетектированным СВЧ сигналом и исходным модулирующим шумом, задержанным на время τ0.
Рис. 3.3. Структурная схема одноканального УКЗП с отражательным зеркалом
Данными недостатками не обладает устройство, имеющее отражательное зеркало для формирования опорного сигнала (рис. 3.3). При этом на образующей эллипса в произвольной точке устанавливают отражательное зеркало таким образом, что задержка сигнала, переотраженного им, удовлетворяет условию τзад=τ0. При таком способе формирования опорного сигнала удается практически полностью устранить влияние

Ложные срабатывания радиолокационных УКЗП снижают пропускную способность на участках, оборудованных устройствами контроля занятости переездов, что позволяет их использование на участках дорог только с малой интенсивностью движения. Для использования УКЗП на участках дорог с высокой интенсивностью движения необходимо обеспечить устойчивую работу УК'ЗП при максимальном уровне фонового шума и наихудших его статистических характеристиках.
Рис. 3.5. Структурная схема одноканального УКЗП повышенной точности

Для обеспечения более высокой точности обнаружения препятствий на границах опасной зоны переезда и повышения защищенности от воздействия мешающих факторов построение одноканальных УКЗП может быть видоизменено. В данном случае антенны УКЗП размещаются в фокусах эллипса по разные стороны автодороги (рис. 3.4). Что же касается приемника (рис. 3.5), то он обеспечивает обнаружение препятствия не только по уровню сигнала на выходе коррелятора, но и по его знаку. Излучаемый передатчиком шумовой СВЧ сигнал, отражаясь от находящегося в контролируемой зоне переезда объекта, поступает в приемник. Одновременно шумовой сигнал через линии задержки с временем запаздывания
τ= ![]()
подается на вход корреляторов сигнала K1, К2 и К3. Выбор времени задержки τ3 и τ1 определяется временем распространения сигнала до двух противоположных границ контролируемой зоны - ближней и дальней, относительно расположения антенн устройства. Время задержки τ2=τоп определяется задержкой отраженного сигнала при распространении до центра контролируемой территории, причем τ1<τ2< τ3. В результате на выходах корреляторов K1, К2 и К3 формируются корреляционные функции, показанные на рис. 3.6, а. Вычитающие устройства ВУ1 и ВУ2 попарно вычитают корреляционные функции, на выходе которых формируется выходная корреляционная функция, представленная на рис. 3.6, б.
Если препятствие находится на переезде, то на выходе ВУ2 формируется результирующий сигнал Вр>0, в результате чего дается команда на включение заградительной сигнализации. Если препятствие находится за пределами контролируемой зоны, то на выходе ВУ2 формируется сигнал Вр<0, и команда на включение заградительной сигнализации не поступает.
Следует иметь в виду, что чем выше крутизна скатов корреляционных функций на выходах корреляторов K1, К2 и К3, тем
Рис. 3.6. Формирования выходного сигнала одноканального УКЗП повышенной точности



Рис. 3.7. Структурная схема многоканального УКЗП
В результате вычисления по выражению (3.2) на выходе каждого из корреляторов К1 и К2 формируются характеристики, показанные на рис. 3.8, а. Следует отметить, что препятствия, находящиеся на переезде и за его границами, формируют на выходе корреляторов К1 и К2 напряжения. различающиеся по полярности, что используется для повышения точности обнаружения препятствий, расположенных на границах охраняемой территории.
Для обеспечения высокой достоверности обнаружения препятствий, находящихся в пределах территории переезда, а также для достижения высокой разрешающей способности по дальности в приемнике предусмотрена корреляционная обработка шумового сигнала в блоках К3, К4, К5 и К6 (см. рис. 3.7). В этих блоках вычисляется функция корреляции Вnjξ(τ) между входными сигналами каждой из четырех антенн η(i) (i=1, 2, 3, 4) и опорным шумовым сигналом ξ(t), снимаемым с линии задержки ЛЗ.

Рис. 3.8. Характеристики многоканального УКЗП: а — оседорожная; б — осепутевая
По аналогии с выражением (3.4) определим выходную характеристику корреляторов К3, К4, К5 и К6 каждого из четырех каналов приемников А и В. Она имеет вид

Для объектов, находящихся вне контролируемой площади переезда и в ее пределах, ΒΣ(τ) отличается полярностью, что используется для улучшения разрешающей способности УКЗП по угловой координате. Кроме того, это приводит к частичной компенсации мешающих отражений от подстилающей поверхности и местных предметов.
При идентичных приемных каналах, однородной подстилающей поверхности и идентичных диаграммах направленности антенн наблюдается почти полная компенсация фоновых отражений от покрытия переезда. Как показано в литературе [7], пространственный разнос каналов приема, а также необходимость формирования знакопеременной характеристики ΒΣ приводят к ухудшению характеристик обнаружения по сравнению с оптимальными.
Рассмотрим некоторые соотношения, которые позволяют оценить качество работы рассматриваемого варианта построения УКЗП. Для этого будем характеризовать каждую операцию вычисления корреляционной функции вероятностью правильного обнаружения сигнала соответствующим коррелятором Рпоi. Под Ρпоi следует понимать вероятность того, что на выходе соответствующего коррелятора напряжение превысит некоторый порог, т. е.![]() .
.
Характеризуя корреляторы К1 и К2 вероятностью Ρпοη, а корреляторы К3-К6 - вероятностью


Анализ рассмотренных вариантов построения устройств обнаружения препятствий на переездах показывает, что одноканальные устройства более простые по реализации, но имеющие низкую помехозащищенность, могут использоваться на участках с малой интенсивностью движения поездов, т. е. на переездах 3-й и 4-й категорий.
Многоканальные УКЗП, имеющие высокую точность фиксации препятствий в пределах опасной зоны переезда, обладающие высокой защищенностью от воздействия мешающих факторов, но более сложные в реализации, могут быть использованы на участках с высокой интенсивностью движения (переезды 1-й и 2-й категорий).