Суммарные погрешности мобильных измерителей параметров движения можно подразделить на две основные группы.
К первой относятся методические погрешности, обусловленные работой измерителя на малых расстояниях от верхнего строения пути. Эти погрешности возникают в связи с искривлением фронта падающей и отраженной электромагнитных волн; флуктуационным характером допплеровского сигнала подпрыгиванием, галопированием и боковой качкой локомотива, заносом; изменением отражающих свойств поверхности верхнего строения пути, принятым способом обработки информации. Эти погрешности в принципе не могут быть исключены без применения специальных мер путем использования дополнительной внешней информации.
Ко второй группе погрешностей относятся инструментальные погрешности, связанные с неточной установкой антенн измерителя, неидеальностью узлов обработки информации, погрешностями, возникающими при прохождении сигналов через приемно-передающий тракт.
Перечисленные выше погрешности в большей или меньшей степени снижают точность измерения параметров движения и требуют разработки специальных мероприятий для их устранения.
Рассмотрим потенциальную точность измерения скорости движения подвижной единицы с помощью мобильного ДИС [41]. С этой целью найдем напряженность электромагнитного поля в месте приема, считая, что передающая и приемная антенны совмещены и перемещаются с равномерной скоростью (рис. 2.15).
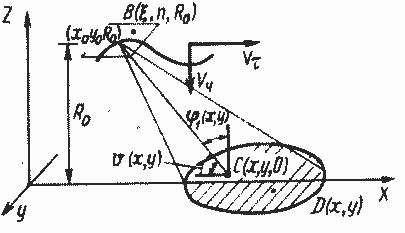
Рис. 2.15. Геометрия размещения антенны ДИС вблизи верхнего строения пути

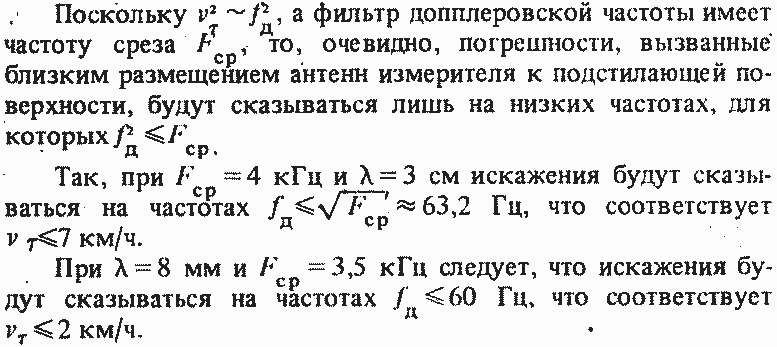
Время обработки Т показано на рис. 2.16. Как видно, с уменьшением удаленности измерителя от верхнею строения пути потенциальная точность измерения скорости увеличивается, так как q→0. Это связано с тем, что при учете кривизны фронта падающей и отраженной волн имеется дополнительная информация о скорости движения, заключенная в квадратичном члене.
На практике мобильные ДИС не используют эту дополнительную информацию, поскольку их структура отличается от оптимальной. При этом квадратичный член в формуле (2.25) воспринимается устройством как помеховый, и в результате погрешности измерения с уменьшением расстояния растут. Это связано с тем, что квадратичные члены в выражении (2.25) вызывают расширение („размытие”) допплеровского спектра частот, что и приводит к увеличению погрешности измерения скорости.
Зависимости (см. рис. 2.16) позволяют сделать вывод о том, что при удалении антенн измерителя от отражающей поверхности на расстояние более 1 м влиянием кривизны фронта падающей и отраженной волн можно пренебречь.
Таким образом, ошибки измерения, вызванные близким расположением отражающих поверхностей от антенн, можно не учитывать при движении подвижной единицы со скоростями, превышающими 10 км/ч.
Другой важный эффект работы мобильных ДИС обусловлен вертикальными колебаниями подвижного состава.
В реальном режиме движения поезда кузов локомотива, а вместе с ним и допплеровский измеритель совершают случайные колебания из-за подпрыгиваний, галопирования, боковой качки и т. п. Наибольшую частоту имеют колебания подпрыгивания. Для ряда типов подвижного состава они превышают 7 Гц, причем зависимость амплитуды колебаний от скорости может быть аппроксимирована линейной функцией Α=ρν. Например, для локомотива ЭР-200 р=0,4 мм/км/ч [6].
Для учета этого явления, вызывающего погрешности измерения скорости, будем считать, что подвижная единица движется с полезной (тангенциальной) составляющей скорости v(t) в горизонтальном направлении и с паразитной (радиальной) составляющей в вертикальном направлении v(t).
Напряженность электромагнитного поля в месте приема в этом случае, как и прежде, определяется соотношением (2.23). Однако в рассматриваемом случае расстояние R между антенной измерителя и поверхностью
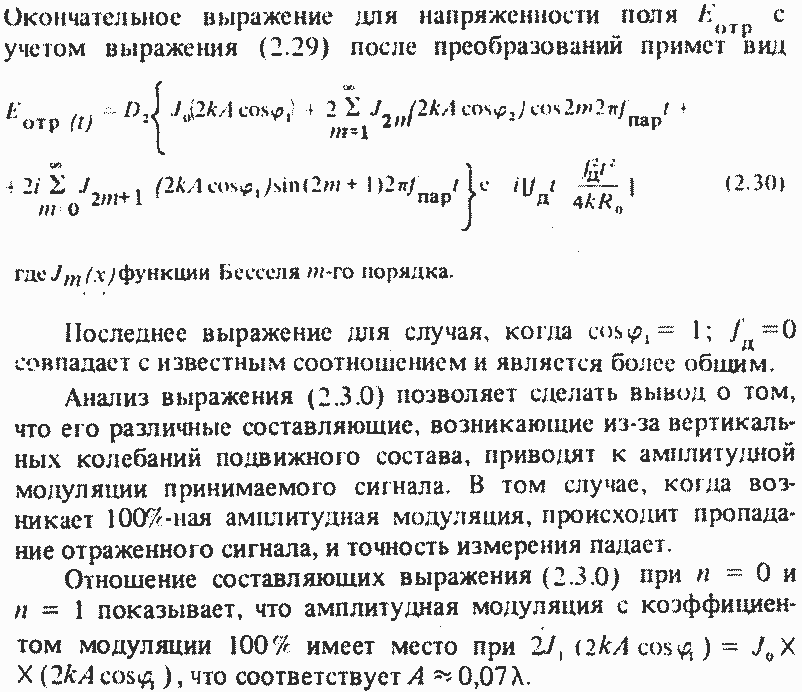
Последнее соотношение показывает, что амплитудная модуляция с коэффициентом модуляции 100 % возникает уже при амплитуде колебаний измерителя, равной 0,021 см, при λ=3 см и 0,056 мм при λ=8 мм.
По мере увеличения отношения А/λ несущая будет модулироваться по амплитуде гармониками все более высокого порядка, что в свою очередь приводит к возрастанию числа пропущенных отсчетов частоты, а следовательно, к снижению точности измерения.
Экспериментальные исследования мобильных ДИС в условиях железнодорожного транспорта показали, что максимальная амплитуда вертикальных перемещений измерителя может достигать при максимальных скоростях движения 10- 50 мм.
Наряду с амплитудной модуляцией колебания подпрыгивания, как это видно из выражения (2.31), вызывают частотную модуляцию отраженного сигнала, что приводит к увеличению ширины спектра сигнала, смешению оценки допплеровской частоты.
Кроме перечисленных факторов, на работу измерителя оказывают влияние низкочастотные колебания галопирования, виляния, боковая качка и др., длительность периода которых близка или превышает постоянную времени измерительного устройства. Они вызывают изменение направления излучения и, следовательно, изменение средней частоты допплеровского сигнала. Возникающие при этом погрешности измерения скорости пропорциональны углу поворота кузова локомотива (δθκ), углу виляния (δθв) и влиянию боковой качки (δθбк).
Погрешности определяются соотношениями [54] .
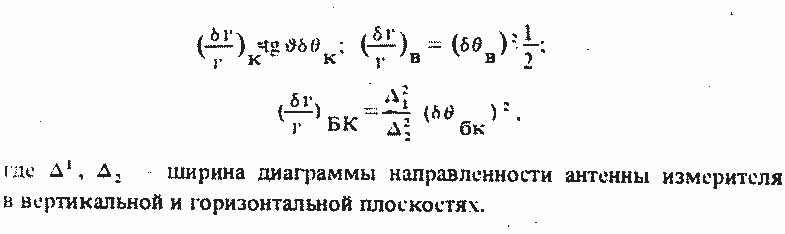
Анализ приведенных соотношений показывает, что на устройства. устанавливаемые на локомотиве, наибольшее влияние оказывают колебания галопирования. Значение угла галопирования определяется вертикальным перемещением центрального и буксового подвешиваний, которое может достигать при максимальных скоростях движения и расстоянии между осями тележек около 15 м (электровоз ЧС=4) 0,4° и погрешности измерителя до 0,7 %.
Таким образом, однолучевые радиолокационные мобильные измерители параметров движения не обеспечивают требуемой точности измерения из-за искривления фронта падающей и отраженной волн, сложных перемещений транспортных средств (галопирования, боковая качка и т. д.), кривизны некоторых участков пути, приводящих к изменению угла облучения. Для устранения воздействия указанных факторов применяют специальные меры, например, используют двухлучевую схему, эффективность которой будет рассмотрена ниже.
Большое значение при оценке работы мобильного измерителя параметров движения имеет анализ погрешностей счисления пройденного пути.
Как показали экспериментальные исследования, определяющими при вычислении пройденного пути становятся погрешности, связанные с несимметрией спектра доплеровского сигнала, и смещение его средней частоты (влияние боковых лепестков диаграммы направленности антенны, изменение рабочей частоты генератора СВЧ при изменении температуры и др.).
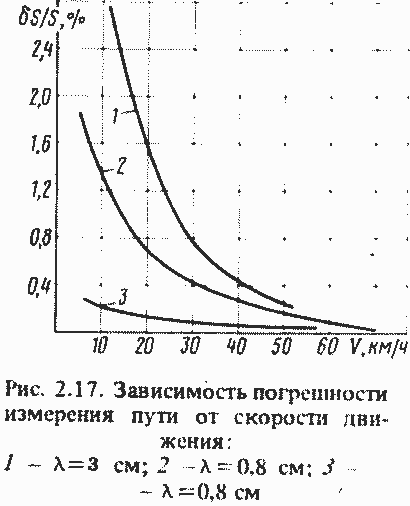
Проведенный выше анализ, как и результаты экспериментальных исследований, показывает, что колебания подпрыгивания вызывают перескоки фаз допплеровских сигналов, что ведет к пропаданию импульсов, число которых должно быть пропорционально измеряемой скорости. Частота модуляции зависит от амплитуды колебаний, а следовательно, от скорости движения локомотива. При счислении пути результат измерения пропорционален суммарному числу импульсов допплеровского сигнала. Поэтому при обработке допплеровского сигнала со счетом числа нулей некоторое число - импульсов сигнала не будет зафиксировано, в результате чего общее количество отсчетов счетчика уменьшается. На рис. 2.17 приведены полученные экспериментально зависимости относительной погрешности измерения пути длиной 5 км от скорости движения при измерении допплеровскими устройствами сантиметрового 1 и миллиметрового 2 диапазонов, в которых вычисление происходит путем счета числа нулей. Повышение точности счисления пути достигается при разделении полосы допплеровских частот на несколько поддиапазонов с автоматическим переключением диапазонов при изменениях скорости. Применение в блоке обработки допплеровского измерителя следящих фильтров и цепей фазовой автоподстройки частоты позволяет значительно уменьшить влияние колебаний состава, увеличить соотношение сигнал шум и повысить точность счисления пути (кривая 3).
Экспериментальные исследования показывают, что при таком построении блока обработки допплеровский измеритель параметров движения подвижного состава миллиметрового диапазона обеспечивает погрешность измерения пути менее 0,1 77 при движении со скоростями более 20 км/ч и погрешность менее 0,4 % в диапазоне скоростей 5— 20 км/ч.