ОСНОВНЫЕ ПРИНЦИПЫ ПОСТРОЕНИЯ МОБИЛЬНЫХ РАДИОЛОКАЦИОННЫХ ИЗМЕРИТЕЛЕЙ ПАРАМЕТРОВ ДВИЖЕНИЯ ПОДВИЖНОГО СОСТАВА
На железнодорожном транспорте эксплуатируются механические и электромеханические скоростемеры, принцип действия которых основан на измерении скорости вращения колесных пар локомотивов. Из-за технического несовершенства этих приборов, а также износа бандажей колесных пар проскальзывания, боксования и конусности бандажей колесных пар погрешность измерения скорости и пути составляет 2-10 %, а в отдельных случаях превышает эти значения. Современные системы автоматического управления движением поездов, предназначенные для работы в условиях возросших скоростей и интенсивности движения, предъявляют более высокие требования к точности измерения параметров движения. В связи с этим разрабатываются радиотехнические допплеровские и корреляционные устройства, основанные на облучении поверхности пути сигналом СВЧ, приеме и обработке отраженного сигнала, которые обеспечивают более высокую точность измерения, чем тахометрические устройства.
Применение таких устройств перспективно также в тех случаях, когда отсутствует непосредственный контакт с поверхностью пути (поезда на воздушной и магнитной подушках).
Технические характеристики мобильных радиотехнических измерителей параметров движения и конструкция в значительной степени определяются особенностями их эксплуатации на подвижном составе. Измерители работают в весьма тяжелых условиях, особенно узлы, устанавливаемые под кузовом локомотива. Они подвергаются воздействию вибрации в диапазоне частот от 100 Гц и ускорений до 3,8 температур, изменяющихся от -55 до +60° С, электромагнитных помех, возникающих при работе тягового оборудования, больших колебании напряжения питания.
Особое внимание следует обращать на герметичность измерителей, устойчивость к воздействию внешних электромагнитных помех по цепям питания, экранировку входных низкочастотных цепей. Целесообразно делить измеритель на несколько блоков, максимально уменьшив число узлов, входящих в приемно-передающий блок СВЧ, устанавливаемый под кузовом локомотива.
По этим причинам приемно-передающий блок СВЧ мобильного допплеровского измерителя целесообразно строить но гетеродинной или автодинной схеме. Однако чувствительность автодинных измерителей на 15-20 дБ ниже чувствительности измерителей, построенных с применением тех же элементов по гетеродинной схеме (в частности, по схеме с волноводным циркулятором). Поэтому при автодинном варианте построения измерителя блок СВЧ должен быть максимально приближен к поверхности пути.
Выбор рабочей частоты допплеровского измерителя в значительной степени определяется характеристиками отражения сигналов от верхнего строения пути (должно выполняться условие диффузного отражения сигналов). При установке блока СВЧ под кузовом локомотива высокочастотные сигналы отражаются от элементов верхнего строения пути: балласта (щебеночного, асбестового, ракушечного, песчаного), железобетонных и деревянных шпал, подрельсовых оснований из железобетонных блоков, асфальтовых и бетонных покрытий в местах пересечений с автомобильными дорогами, элементов стрелочных переводов и др. Энергетические характеристики отражения сигналов зависят от соотношения размеров высоты отражающих элементов поверхности пути А, длины полны излучаемых колебаний λ и угла облучения поверхности φ (οтносительно вертикали к поверхности). Допплеровский и корреляционный методы измерения предполагают наличие диффузно рассеиваемого сигнала в направлении на приемопередатчик. Отношение мощности сигнала, диффузно отраженного οт поверхности Рдиф, к полной падающей на поверхность мощности Рпад определяется соотношением [50]
![]() (2.14)
(2.14)
При рабочей частоте 10 ГГц уровень диффузно отраженного сигнала на 10—12 дБ ниже уровня сигнала, соответствующего частоте 37,5 ГГц (при отражении от малых неоднородностей). Для частоты 10 ГГц отражение имеет диффузный характер при размерах неоднородностей более 1 см. Уменьшение рабочей частоты измерителя ниже 8—9 ГГц нецелесообразно, так как при этом ухудшаются характеристики отражения сигналов и увеличиваются габаритные размеры устройств. Увеличение рабочей частоты допплеровского измерителя до значения выше 40 ГГц также нецелесообразно, так как при этом возрастает влияние вертикальных и боковых колебаний подвижного состава.
где Ризл мощность излучаемого сигнала; х - коэффициент использования антенны, равный обычно 0,6-0,8; Н - высота установки блока СВЧ.
Как следует из формул (2.3) и (2.4) или уменьшения погрешности измерения скорости целесообразно уменьшать ширину диаграммы направленности антенны 01 и плоскости движения. Из конструктивных и энергетических соображений целесообразно уменьшать высоту установки блока СВЧ измерителя. Однако при этом не будет выполняться условие работы антенны в дальней зоне, что приводит к увеличению ширины диаграммы направленности антенны и cпектpa допплеровских частот.
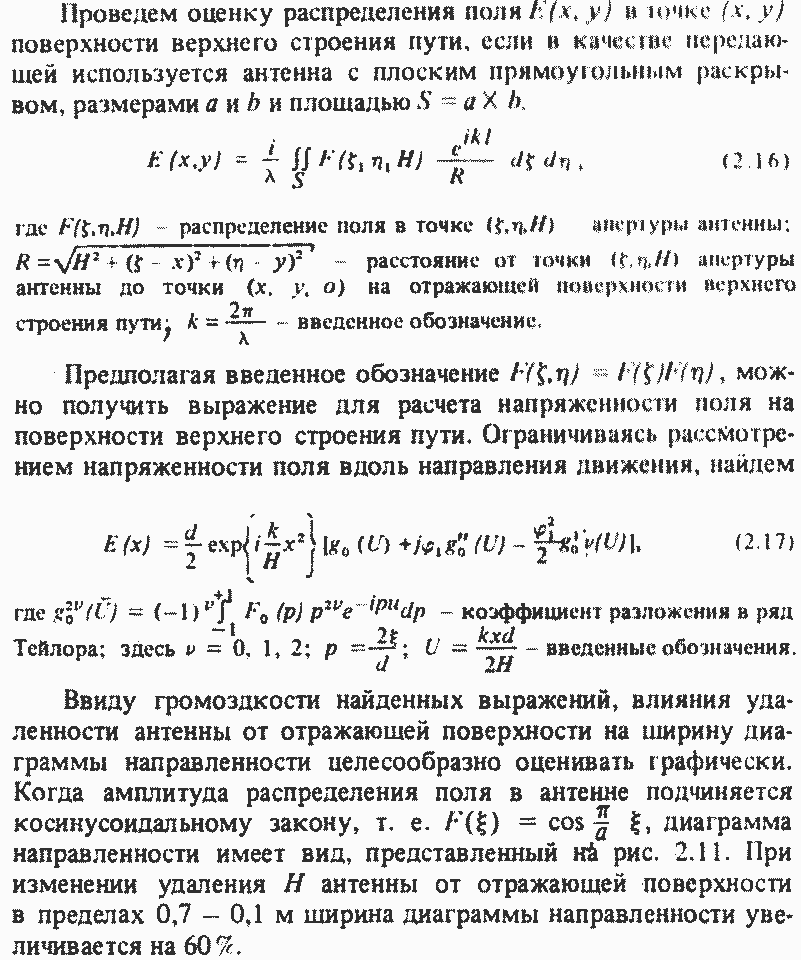
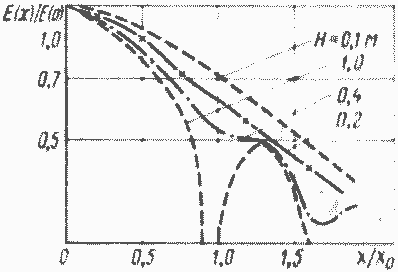
Рис. 2.11. Зависимость ширины диаграммы направленности от удаления до отражающей поверхности
Корреляционный метод измерения скорости движения и пройденного пути локомотива основан на непрерывном облучении поверхности железнодорожною полотна СВЧ сигналом и приеме отраженного сигнала на две разнесенные по направлению антенны.
Измеритель скорости и пройденного пути с корреляционной обработкой принимаемых сигналов, (рис. 2.12) состоит из двух одинаковых датчиков Д1 и Д2 устанавливаемых под кузовом локомотива; коррелятора КОР и измерителя-преобразователя ИП. Сигнал СВЧ генератора излучаемый вертикально передающей антенной А1, отражается неровной поверхностью железнодорожного полотна и принимается приемной антенной А2. Принятый сигнал поступает на амплитудный детектор АД, с выхода которого снимается и усиливается низкочастотный сигнал.
Рис. 2.12. Структурная схема корреляционного измерителя скорости и пройденного пути
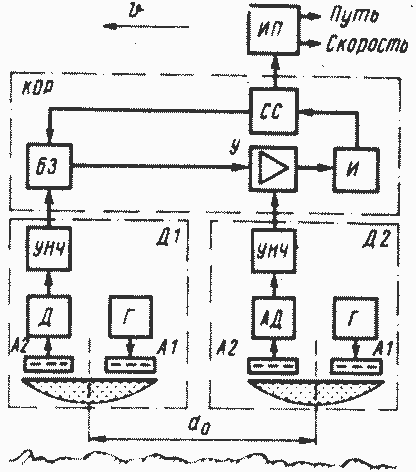
Амплитуда этого сигнала является случайной функцией, определяемой изменениями амплитуды отраженного СВЧ сигнала, вызванными изменением расстояния между антенной и отдельными отражателями (крупные щебеночные неоднородности, края шпал и т. д.) и изменением коэффициента отражения вследствие различных диэлектрических свойств и проводимостей материалов участков земляного полотна.
Диаграмма направленности антенны может быть аппроксимирована выражением (2.2). Тогда мощность сигнала на выходе приемной антенны
Для повышения коэффициента модуляции необходимо уменьшать продольный размер облучаемого участка поверхности и высоту установки измерительного устройства. Один из перспективных путей построения корреляционных измерителей для наземного транспорта основан на применении антенн, фокусирующих излучаемый сигнал на поверхности в узкую полосу, перпендикулярную направлению движения. В таких антеннах применяют фокусирующие линзы из диэлектрика (фторопласта, полистирола) которые могут обеспечить при А0=3 см фокусировку излучаемого сигнала в пределах полосы шириной 4—5 см, что позволяет регистрировать сигналы, отраженные от отдельных неоднородностей. Глубина амплитудной модуляции при облучении такой антенной поверхности с высоты Н0=0,3 м и отражении от пути с щебеночным балластом достигает 20 %.
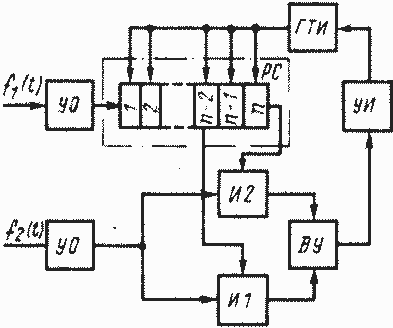
Рис. 2.13. Структурная схема дифференциального полярного коррелятора
Функция взаимной корреляции отраженных сигналов имеет максимальное значение при ί=τт. Поэтому задача измерения скорости сводится к непрерывному слежению за максимумом функции В(τ') и измерения τт. Слежение за максимумом функции В(τ) может быть реализовано с помощью системы автоматического регулирования с обратной связью. Следящая система СС (экстремальный регулятор) непрерывно следит за максимумом функции корреляции, вычисляемой умножителем У и интегратором И. При уменьшении функции В(т), вызываемом изменением скорости, в блоке регулируемой задержки БЗ происходит изменение значения τт до величины, соответствующей максимуму функций В(т).
При воздействии помех, вызванных главным образом случайными перемещениями кузова локомотива, уменьшается сходство между сигналами датчиков, что в свою очередь уменьшает функцию взаимной корреляции В(т). Поэтому применять устройства слежения за максимумом функции корреляции нецелесообразно. Более высокую точность измерения обеспечивает дифференциальная схема, которая вычисляет производную от функции взаимной корреляции. В этом случае следящая система работает по нулю производной этой функции и ошибка при определении времени задержки уменьшается.
Сигналы с выходов идентичных датчиков (рис. 2.13) приемного устройства с помощью усилителей ограничителей УО преобразуются в последовательность прямоугольных импульсов. В качестве переменной линии задержки используется регистр сдвига PC с переменной частотой продвигающих импульсов, на который поступает преобразованный сигнал f(t). Этот сигнал задерживается с помощью регистра PC на время
![]()
где п - число ячеек регистра сдвига; Тп - период следования продвигающихся импульсов.
Задержанный сигнал с ячейки n- 2 регистра сдвига вместе с сигналом от датчика Д2 подается на схему совпадения И1 первого канала коррелятора, выполняющую функцию умножения. Дополнительное запаздывание по времени Δτ, необходимое для работы дифференциальной схемы, создается последующими ячейками регистра сдвига п - 1 и n. Выходной сигнал с последней ячейки регистра сдвига вместе с сигналом, поступающим от датчика Д2, подается в схему совпадения И2.
Выходной сигнал схем совпадения И1 и И2 поступает в вычитающее устройство ВУ и далее в усилитель-интегратор УИ. Выходной сигнал усилителя-интегратора воздействует на генератор тактовых импульсов ГТИ, управляя его частотой. Частота генератора ГТИ определяет значение регулируемой задержки сигнала в регистре сдвига PC. Поэтому частота генератора ГТИ пропорциональна измеряемой скорости, и частотомер, включенный на выходе генератора, может быть проградуирован в единицах измерения скорости.