Как уже отмечалось, наиболее существенное влияние на точность измерения оказывают колебания подпрыгивания, галопирования, боковая качка и др. Это приводит к амплитудной и частотной модуляциям отраженного допплеровского сигнала, которые снижают точность измерения параметров движения.
Существуют различные методы повышения точности измерения, связанные с устранением влияния указанных факторов на работу измерителя.
Например, для борьбы с паразитной амплитудной модуляцией, вызванной колебаниями измерителя, предлагается использовать специальный генератор управляемого напряжения (ГУН), восстанавливающий сигнал на частоте, которая была в интервале времени, до пропадания.
Наилучшие результаты удается получить использованием двух приемно-передающих антенн, направленных в противоположные стороны вдоль вектора движения. При этом обработка отраженных сигналов может производиться как в высокочастотной, так и в низкочастотной части приемника.
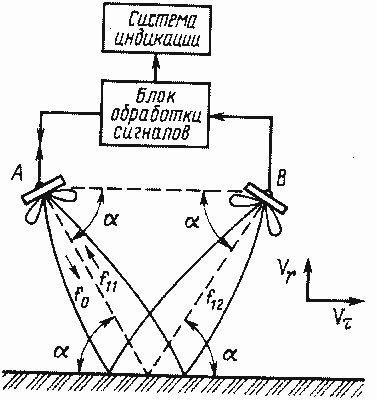
Рис. 2.18. Схема устранения влияния паразитных вертикальных колебаний измерителя
Допплеровский сигнал, пропорциональный скорости движения, выделяется и обрабатывается в раздельных низкочастотных каналах измерителя. Использование суммы и разности низкочастотных колебаний, выделяемых в разных каналах, позволяет определить и компенсировать изменение допплеровской частоты, вызванное паразитными колебаниями измерителя.
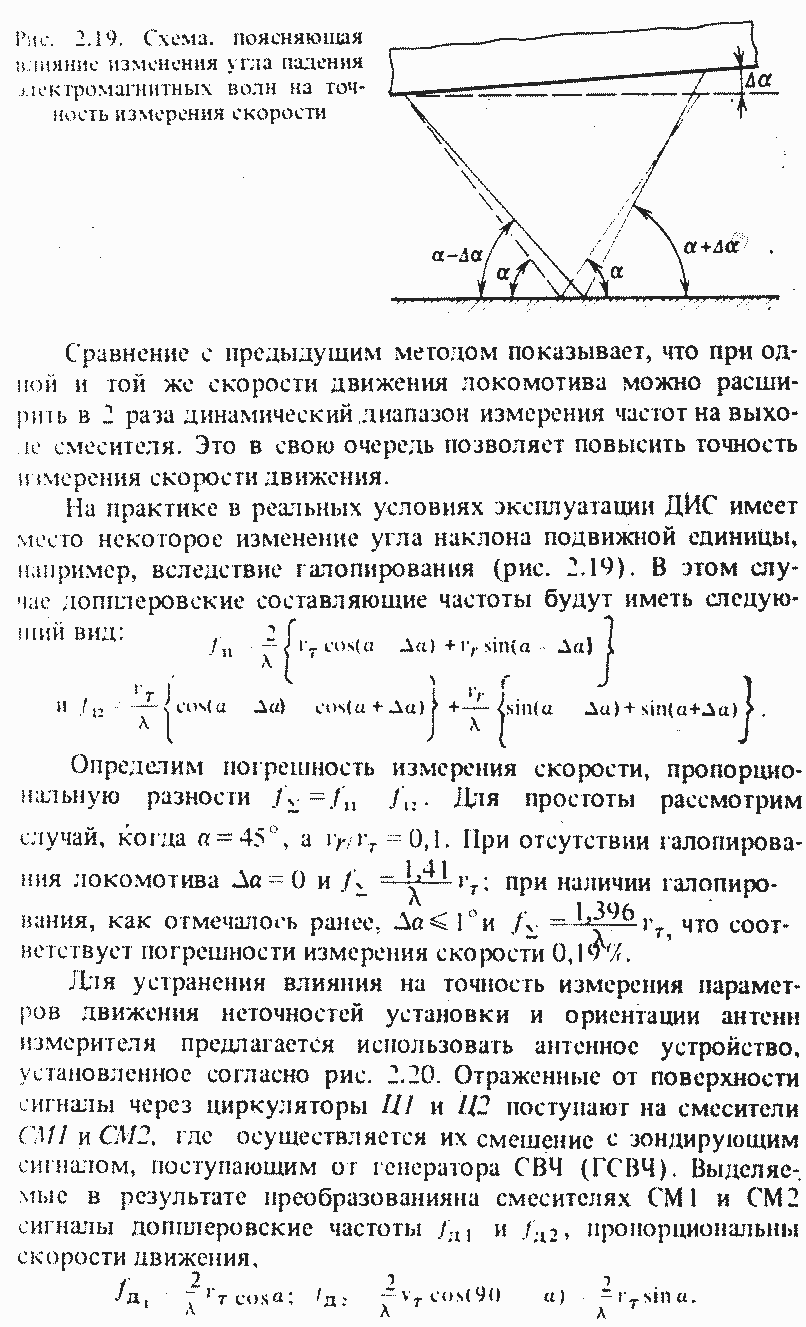
В случае использования одной антенны при отклонении оси диаграммы направленности на 1° от номинального значения, равного 45°, погрешность измерения скорости составляет 1,8%, а при отклонении на 10 градусов достигнет 23%. Применение рассмотренного способа снижает погрешность измерения скорости движения при отклонении угла визирования на 1° до 0,015 %, а при отклонении на 10° до 1,5%.
Рассмотренные методы позволяют сделать вывод, что с погрешностями, отнесенными к первой группе, можно бороться путем оптимизации структуры измерителя.
В связи с вышеизложенным в разработанном ВНИИЖТом допплеровском измерителе параметров движения за основу была принята двухлучевая система. Измеритель состоит из двух приемно-передающих устройств, антенны которых направлены в противоположные стороны вдоль направления движения локомотива.
При этом угол между осью диаграммы направленности и ее проекцией на поверхность верхнего строения пути равен 45°. Угол между направлением движения и проекцией диаграммы направленности антенн на верхнее строение пути равен 8°, что обусловлено максимальным углом отклонения при боковой качке подвижного состава.
Одним из недостатков горочных измерителей является то, что в диаграмме направленности принимаемого сигнала возникают, кроме основного, еще и боковые лепестки. При нахождении отцепа между основным и боковыми лепестками диаграммы направленности отраженный сигнал либо полностью отсутствует, либо очень мал.
Кроме того, при движении отцепа происходит изменение угла облучения отцепа. В результате в отдельные моменты времени сигнал практически нс принимается. Для устранения этого недостатка модулируют несущую частоту по пилообразному закону. В приемном устройстве отраженный от объекта сигнал смешивается с опорным, выпрямляется и в пределах времени модуляции определяется момент времени, при котором амплитуда принимаемого сигнала максимальна. Аналогичные моменты времени определяются на последующих интервалах модуляции.
Эти последовательно взятые значения сигналов после совместной фильтрации образуют сигнал, который используется для определения параметров движения. Длительность периода сформированного сигнала обратно пропорциональна скорости отцепа, а изменение его амплитуды соответствует ускорению.
Указанный метод может быть использован и в мобильных, измерителях как средство борьбы со сферичностью фронта падающей и отраженной от верхнего строения пути волн. Как было сказано выше, следствием искривления фронта падающей и отраженной волн является то, что отраженный от железнодорожного полотна сигнал состоит из большого количества колебаний с различными допплеровскими частотами и нерегулярно распределенными фазами. Происходит размытие спектра отраженного сигнала, относительная полоса которого может быть оценена для постоянной скорости движения [54].
![]()
где fд - допплеровская частота отраженного сигнала при отсутствии искривлений фазового фронта; ∆fд - приращение допплеровской частоты. вызванное кривизной фазового фронта; θ - ширина диаграммы направленности измерителя.
При некоторых неблагоприятных условиях, вызванных качкой, вибрацией и т. п., отдельные допплеровские частоты могут взаимно компенсироваться, так что скорость транспортного средства не может быть измерена.
Для уменьшения этого неблагоприятного эффекта наряду с указанными способами на практике используют фокусирующие и коллиматорные системы линз [23]. Линзы используют для следующих целей: фазового согласования сигналов в области раскрыва антенны для получения карандашного луча; создания необходимого фазового распределения в раскрыве антенны для получения плоского фазового фронта в месте падения сигнала на поверхность верхнего строения пути.
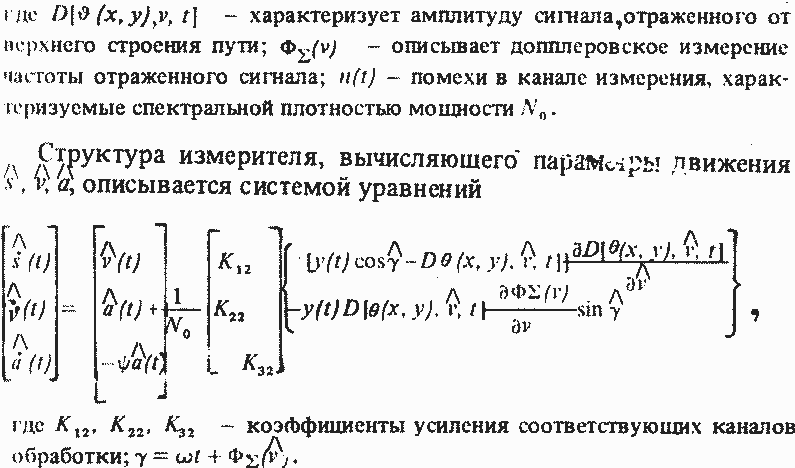
Формирование карандашного луча приводит к уменьшению диаметра облучаемого „пятна” на верхнем строении пути, что в свою очередь уменьшает разброс допплеровских частот. Другим перспективным направлением увеличения точности измерения параметров движения является построение специализированных бортовых измерителей на базе микроЭВМ. Алгоритм вычисления параметров движения подвижных объектов в таких измерителях базируется на теории Калмановской фильтрации или нелинейной фильтрации Стратоновича.
Рассмотрим особенности построения таких измерителей на примере подвижной единицы, динамика которой описывается системой дифференциальных уравнений.
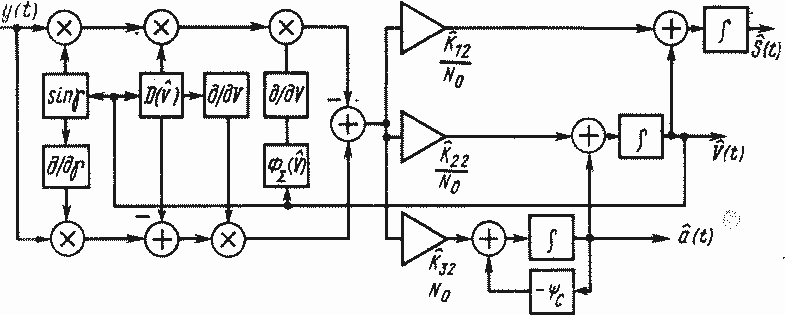
Рис. 2.21. Структурная схема измерителя, используемого при пространственно-временном характере сигналов
Данный измеритель имеет два канала определения ошибки по скорости. Первый канал предназначен для выделения сигнала ошибки из амплитуды отраженного от поверхности сигнала, второй - из его фазы.