ОПТИМИЗАЦИЯ РАДИОТЕХНИЧЕСКИХ ОБНАРУЖИТЕЛЕЙ ПРЕПЯТСТВИЙ
Построение оптимальных радиотехнических обнаружителей препятствий (РТОП) в условиях железнодорожного транспорта имеет ряд особенностей. Обнаружение препятствий здесь ведется на фоне коррелированного шума, стационарного на интервале времени, значительно превышающем время обработки сигнала. Шумовым фоном служит отражение зондирующего сигнала от местных предметов и верхнего строения пути. Статистические характеристики фона достаточно хорошо изучены, и зависимость этих характеристик от времени года, погодных условий, вида покрытий снята экспериментально. При оптимизации построения РТОП необходимо учитывать пространственный разнос передающего и приемных каналов.
При построении РТОП могут применяться как параметрические, так и непараметрические методы. При параметрическом методе показатель качества функционирования РТОП поддерживается выше заданного уровня при любых изменениях условий, в которых происходит обнаружение препятствий, т. е. при любых изменениях температуры, погодных условий и т. д. При построении по непараметрическому методу основное внимание уделяется нечувствительности системы к любым изменениям фона. Параметрические системы основаны на слежении за изменением статистических параметров фона (т. е. помеховой обстановки) и сигнала. Построение непараметрических систем в конкретных условиях установки на железной дороге означает, что они должны обеспечивать вероятные характеристики. Поскольку основное назначение РТОП состоит в надежном обнаружении препятствий с наименьшими ошибками, то к этим характеристикам относят следующие: вероятность правильного обнаружения препятствий Рпо; вероятность ошибки Рош, вероятности возникновения аварийной ситуации из-за пропуска препятствия Р и вероятности ложной остановки поезда Рлт.
Поскольку в большинстве случаев отсутствует априорная информация о вероятности возникновения аварийной ситуации на данном участке железнодорожного полотна или на переезде, то наиболее приемлемый подход к выбору оптимальной структуры РТОП определяет критерий Неймана-Пирсона. Согласно этому критерию выбирают такую структуру РТОП, которая обеспечивает минимально возможную вероятность в возникновении аварийной ситуации Рпр при условии, что вероятность Рлт ложной остановки поезда не превышает заданное значение.
Как известно [1, 21] оптимальным критерием принятия решения в двух альтернативных случаях (наличие или отсутствие аварийной ситуации) является сравнение с порогом отношения правдоподобия или его монотонной функции.
![]() (3.8).
(3.8).
где![]() - функции правдоподобия соответственно при наличии (гипотеза Н1) и отсутствии (гипотеза Н0) препятствий; к - пороговый уровень, значение которого определяется допустимой вероятностью ложных остановок поезда; λ - параметры сигнала s(λ).
- функции правдоподобия соответственно при наличии (гипотеза Н1) и отсутствии (гипотеза Н0) препятствий; к - пороговый уровень, значение которого определяется допустимой вероятностью ложных остановок поезда; λ - параметры сигнала s(λ).
Как показали исследования [36, 37], наиболее перспективными являются РТОП с несколькими пространственно-разнесенными каналами приема и пространственно-временной обработкой сигналов.
Пусть РТОП имеет т пространственно-разнесенных каналов приема, а в качестве зондирующего сигнала используются шумовые сигналы с заданными статистическими характеристиками. В этом случае структура каждого канала приема в предположении, что сигнал и фон имеют многомерное нормальное распределение полностью, определяется логарифмом отношения правдоподобия. Так, для і-го канала [37]
Как видно из уравнения (3.9), структура оптимального обнаружителя препятствий представляет собой набор корреляторов, вычисляющих функцию взаимной корреляции сигналов на входах каждого из т каналов.
На практике, однако, возможны случаи, когда сигналы в отдельных каналах не коррелированы между собой. Вычисление функции взаимной корреляции в этом случае никакой информации о наличии препятствия не дает. Так, например, в многоканальном УКЗП (см. рис. 3.7) сигналы в приемниках А и В, разнесенных по обе стороны железнодорожного пути, независимы. Для этих каналов можно записать
![]()
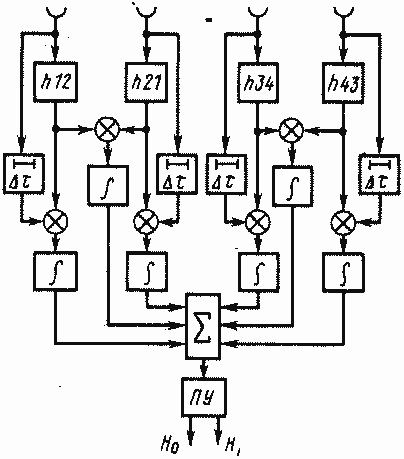
Принимая во внимание, что![]() структурную схему оптимального обнаружителя препятствий, в котором сигналы в некоторых каналах независимы между собой, для случая т=4 можно представить в виде, показанном на рис. 3.17. Время задержки τ выбирается равным τоп.
структурную схему оптимального обнаружителя препятствий, в котором сигналы в некоторых каналах независимы между собой, для случая т=4 можно представить в виде, показанном на рис. 3.17. Время задержки τ выбирается равным τоп.
Рис. 3.17. Структурная схема оптимального 4-канального УКЗП
Зависимости достоверности обнаружения препятствий (рис. 3.18) позволяют сделать вывод о том [37], что для получения удовлетворительных результатов время обработки сигнала может быть ограничено двумя-тремя интервалами корреляции сигнала τк. Увеличение числа каналов позволяет значительно снизить требования, предъявляемые к отношению сигнал/шум для обеспечения требуемой вероятности правильного обнаружения препятствия.
Сравнение практически реализуемых РТОП (см. рис. 3.7) со структурой оптимальных т-канальных систем показывает, что, например, для многоканальных УКЗП специфика работы обнаружителей в условиях железнодорожных переездов не позволяет полностью реализовать возможности и достоинства пространственно-временной обработки сигналов.
Следует отметить, что задача оптимизации построения многоканальных РТОП может быть решена без наложения ограничений на плотность распределения вероятностей (ПРВ) параметров сигнала w(λ) и помех w(n), которые на практике отличаются от нормального закона.
Рассмотрим задачу обнаружения протяженного объекта с помощью п разнесенных в пространстве каналов приема. Сигнал, отраженный от протяженного объекта, описывается выражением![]()
где λ — параметры обнаруживаемого объекта, под которыми может пониматься скорость его перемещения v, расстояние до него R0 и т. д.
Будем считать, что каждый п-й канал осуществляет наблюдение в дискретные моменты времени. Сигнал имеет вид
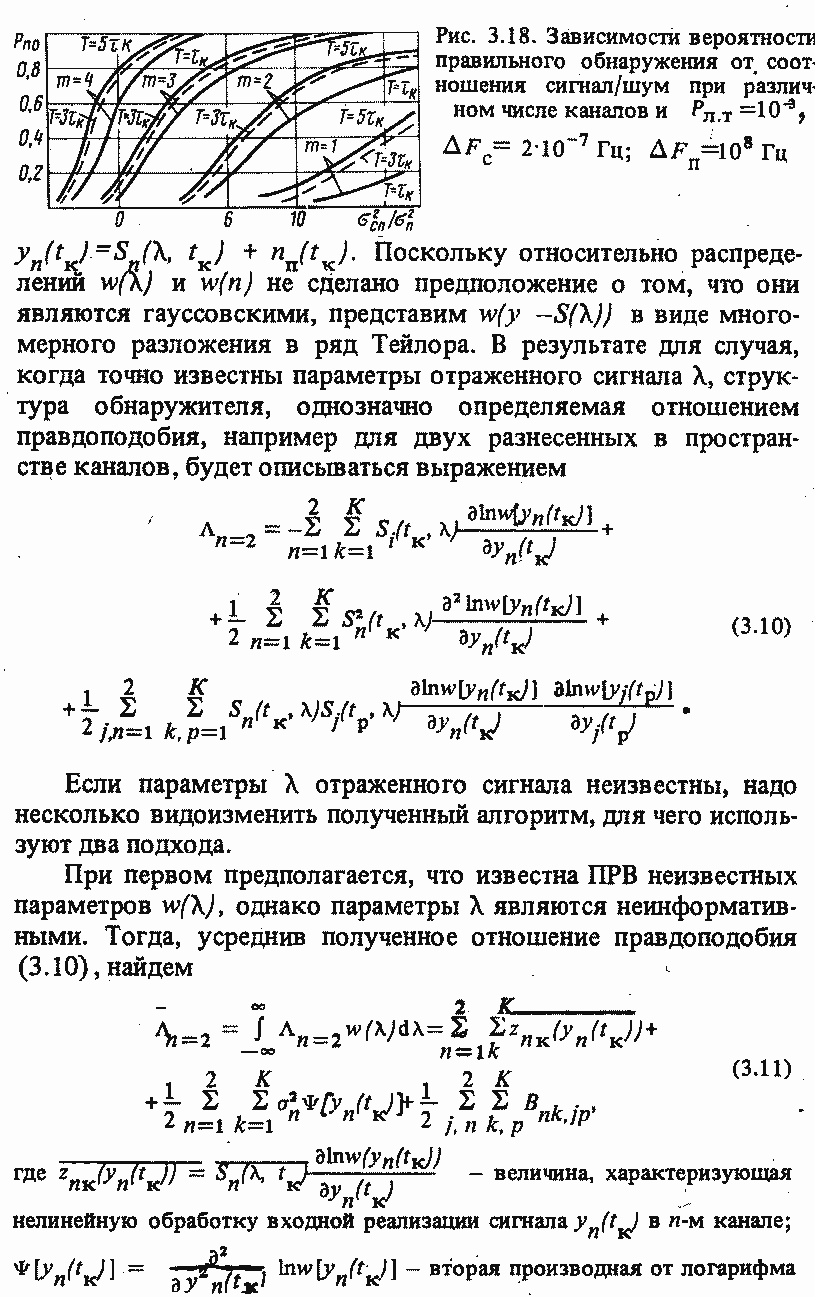
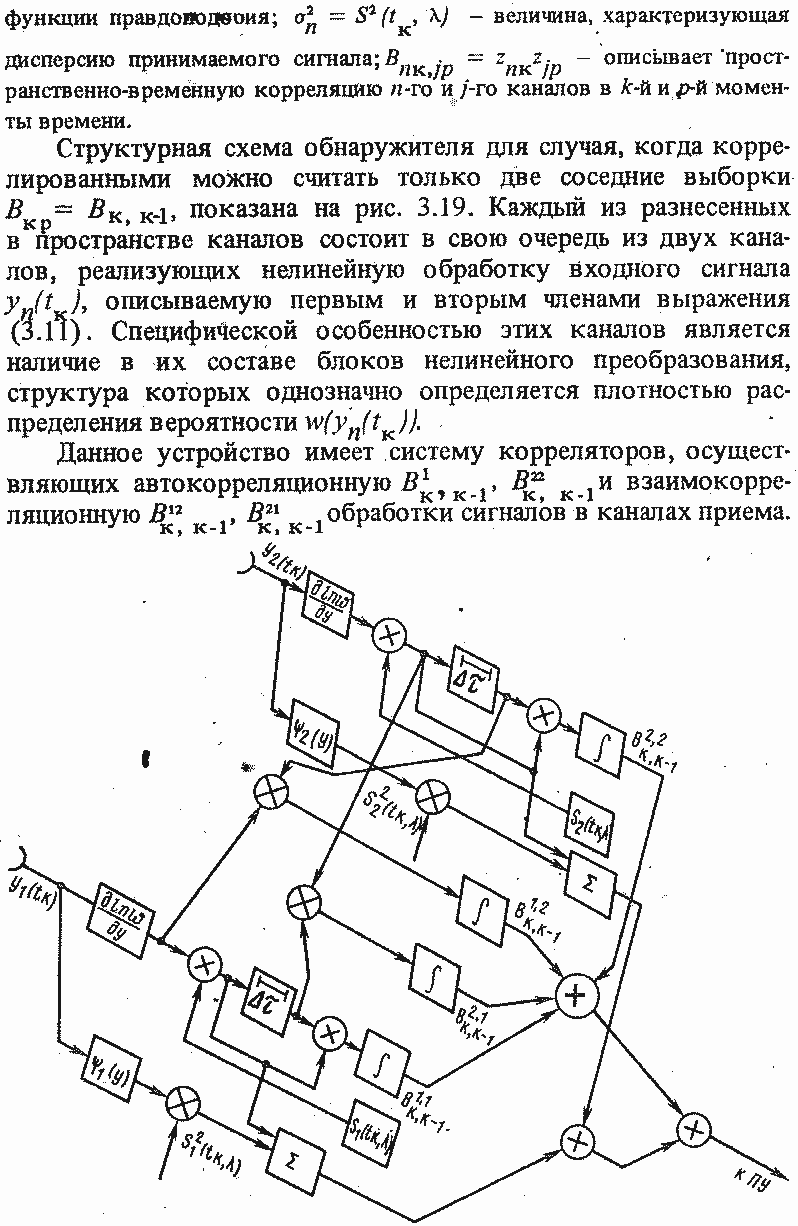
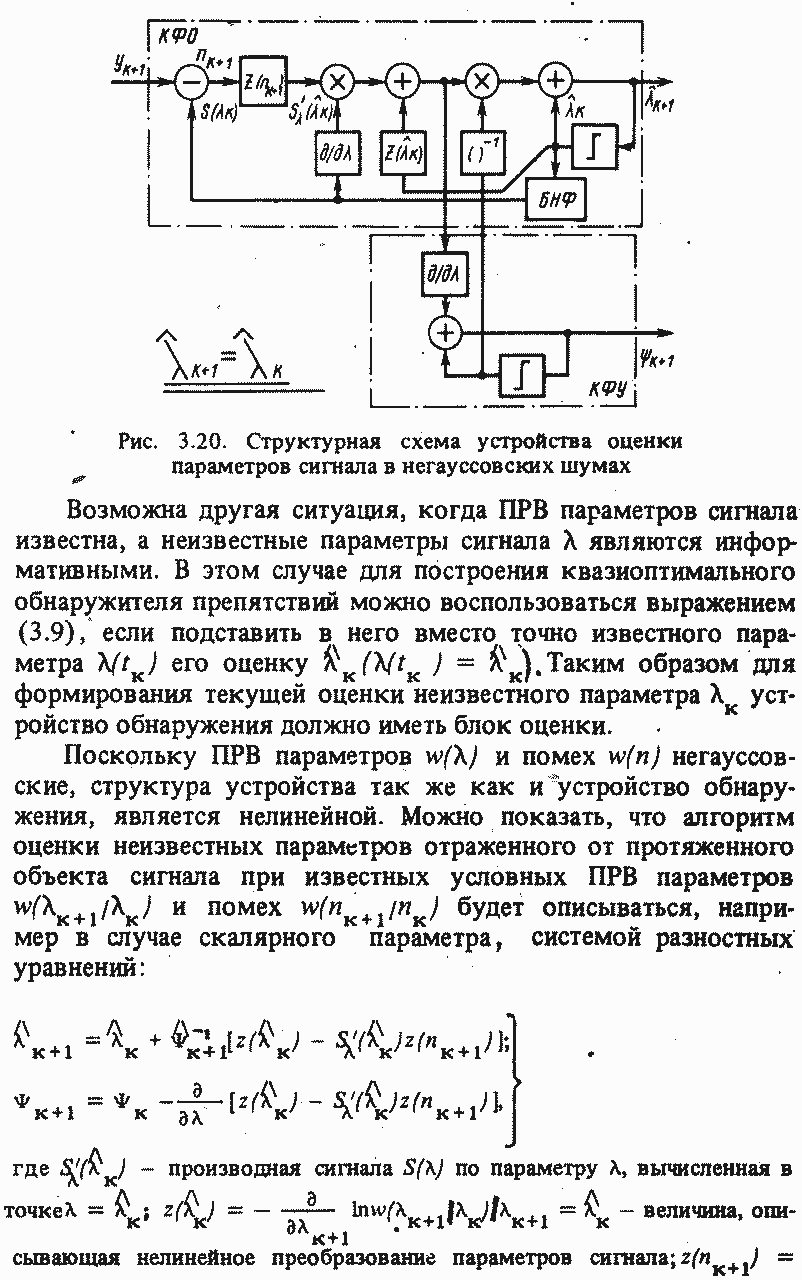
Рис. 3.19. Структурная схема двухканального устройства обнаружения пространственно-временных сигналов в негауссовских помехах
На основании изложенною можно сделать вывод о том, что квазиоптимальный обнаружитель сигналов на фоне негауссовских помех отличается от обнаружителя сигналов на фоне гауссовских помех наличием на его входе дополнительного нелинейного устройства, характеристика которого полностью определяется распределением помех.
Одним из наиболее перспективных методов построения оптимальных РТОП является метод последовательного анализа. Это обусловлено тем, что при работе РТОП, стационарно установленных вблизи контролируемой площади, можно оценивать местоположения мешающих местных предметов, а также статистические характеристики мешающих отражений, на фоне которых обнаруживаются объекты. Поскольку при обнаружении неподвижных объектов время наблюдения может быть большим, целесообразно использовать в РТОП методы последовательного анализа [35].
При последовательном обнаружении объектов время, необходимое для вынесения решения о наличии или отсутствии препятствий, выбирается в самом приемном устройстве, а число выполненных измерений п зависит от характера принимаемых сигналов. Приемное устройство сравнивает отношение правдоподобия Λ на каждом интервале наблюдения с двумя порогами А и В. Если Λ>А, принимается решение о наличии препятствия, если А>Λ>В, принимается решение о продолжении наблюдений, если Λ<В, принимается решение об отсутствии препятствия.
Для рассматриваемого 2-канального обнаружителя препятствий пороги обнаружения выбирают из условия:
Значение порогов А и В существенно зависит от пространственного разноса каналов приема и их размещения вблизи территории, на которой ведется обнаружение объектов [35]. В каждом конкретном случае использования РТОП следует оптимальным образом выбирать значения порогов обнаружения в зависимости от пространственного разноса каналов.
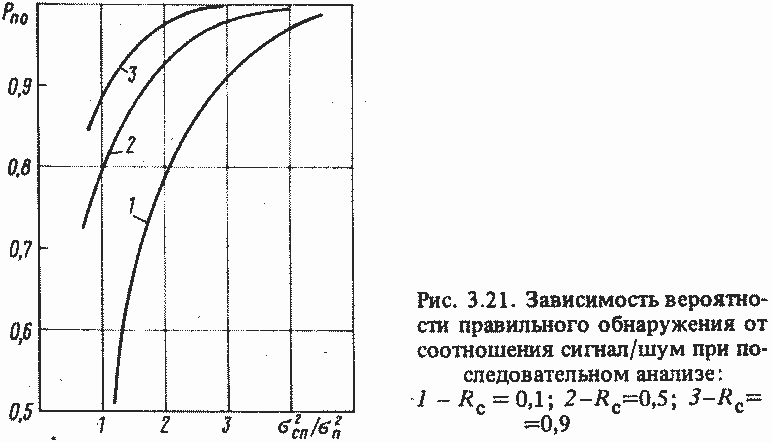
На рис. 3.21. показана зависимость вероятности правильного обнаружения препятствия от соотношения сигнал/шум для РТОП, использующего последовательную процедуру решения, при различных значениях коэффициента корреляции сигнала Rc и неизменном коэффициенте корреляции помехи Rn = 0,1.
В данном случае пространственный разнос каналов характеризуется коэффициентом взаимной корреляции сигналов Вс и помех Вп в каналах приема.
Сравнение характеристик обнаружения в случае последовательного анализа с характеристиками обнаружения ранее рассмотренных алгоритмов показывает существенное преимущество последовательного анализа, что обусловлено большим интервалом времени обработки принимаемых сигналов и спецификой данного алгоритма принятия решения.
Наиболее уязвимым местом всех рассмотренных выше алгоритмов, осуществляющих оптимальное обнаружение препятствий в пределах фиксированной пространственной области на фоне мешающих воздействий, является их сильная чувствительность к изменению априорных предположений. Так, если распределение помехи на фоне которой осуществляется обнаружение, известно, оптимальный алгоритм обнаружения однозначно определяется логарифмом отношения правдоподобия (3.10). Однако в процессе эксплуатации за счет влияния внешних атмосферных и температурных воздействий, изменений времени года и суток статистические характеристики мешающих воздействий непрерывно изменяются, т. е. нарушаются условия оптимальности заложенных в РТОП алгоритмов. В этих условиях достоверность обнаружения объектов может существенно уменьшиться, а вероятность ошибочных решений - возрасти.
Одним из путей решения данной задачи является построение следящих (адаптивных) РТОП. Вместе с тем сложность практической реализации подобных устройств делает их применение в ряде случаев экономически неэффективным.
Алгоритмы, сохраняющие в определенных границах свои характеристики, называются устойчивыми. Разработка устойчивых алгоритмов для РТОП позволяет обеспечить заданное качество функционирования системы при любых изменениях характеристик помех определенного класса. Это особенно важно в условиях частичной или полной априорной неопределенности.
На практике распределение помехи w(n) часто неизвестно; в лучшем случае может быть установлен лишь класс плотностей распределения![]() , которому оно принадлежит. Наиболее широко употребляемыми являются следующие классы распределений [13]:
, которому оно принадлежит. Наиболее широко употребляемыми являются следующие классы распределений [13]:
класс 1. Плотности распределения, образованные смесью известной плотности р(п) с любой неизвестной плотностью h(n), взятыми в пропорции 1 — ϵ и ϵ, т. е. плотности вида w(n) = ![]()

Использование БНП с подобной характеристикой позволяет минимизировать максимальную вероятность пропуска Р (в РТОП - вероятность создания аварийной ситуации при условии, что вероятность ложного срабатывания Рпт не превышает уровень а при любых изменениях характеристик помех из заданного класса).
Вышеизложенное позволяет сделать вывод, что применение в качестве алгоритма обнаружения, например алгоритма, описываемого выражением (3.12), с характеристикой БНП, описываемой выражением (3.14), гарантирует заданную эффективность алгоритма в классе помех![]() при любом неизвестном распределении h(n). Эффективность работы обнаружителей определяется только долей засорения е, а не их конкретными реализациями. Следует отметить, что уже при небольших значениях е она существенно выше эффективности классических процедур.
при любом неизвестном распределении h(n). Эффективность работы обнаружителей определяется только долей засорения е, а не их конкретными реализациями. Следует отметить, что уже при небольших значениях е она существенно выше эффективности классических процедур.
Таким образом, использование теории асимптотически оптимальных устойчивых алгоритмов в системах РТОП гарантирует обеспечение заданных характеристик РТОП при любых изменениях помеховой обстановки.