Режимы нагрузок тяговых двигателей определяются не типом двигателя, а условиями эксплуатации для конкретного вида ЭПС. Например, для грузового электровоза (рис. 1.1, а) характерны наибольшая реализуемая сила тяги Fмах при разгоне (диапазон скоростей) и соответственно нарастание мощности Р на этом участке, пропорциональное росту скорости υ, сохранение мощности в диапазоне скоростей, где, естественно, сила тяги F уменьшается. Наконец, при скоростях мощность уменьшается в соответствии с формой тяговой характеристики на этом участке.
Грузовые электровозы характеризуются отношением максимальной скорости к номинальной, примерно равным 2. Мощность, развиваемая тяговым двигателем при максимальной скорости для грузовых электровозов, меньше номинальной и обычно составляет (0,5-0,6) Рном. Формы кривых нагрузок (см. рис. 1.1, а) обусловлены необходимостью развить наибольшую мощность в конце разгона электровоза и поддержанием ее при движении на руководящем подъеме.
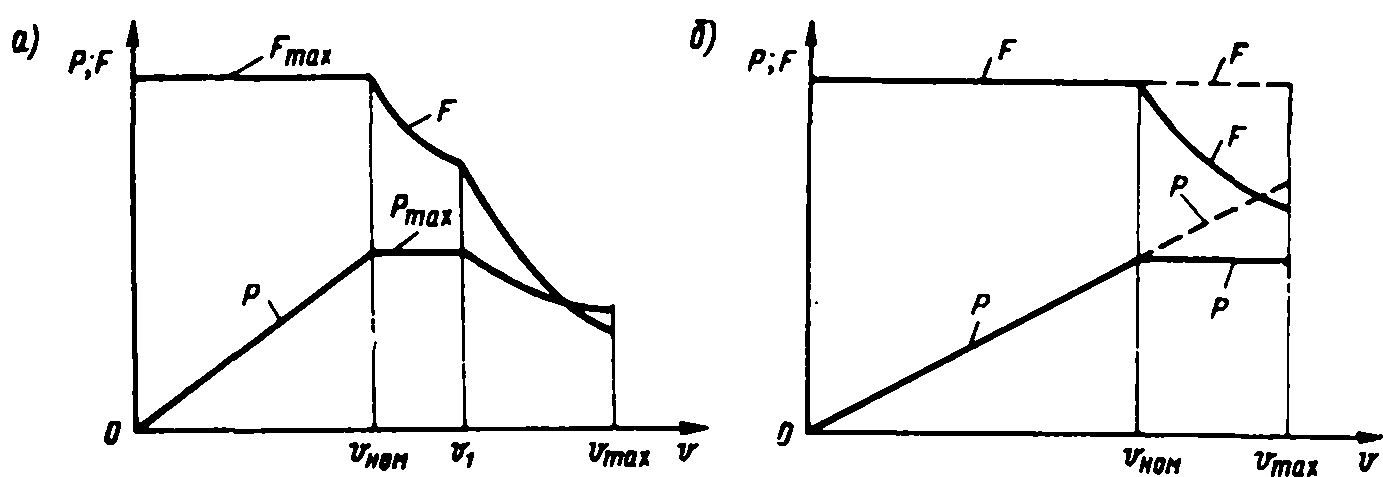
Рис. 1.1. Характерные зависимости мощности и силы тяги от скорости движения для грузовых электровозов (а) и пассажирских электровозов и электропоездов (б)
При движении поезда на площадке в диапазоне скоростей потребная сила тяги резко снижается.
Для пассажирских электровозов и электропоездов с максимальной скоростью 130—160 км/ч отношение максимальной скорости к номинальной обычно составляет 1,4—1,6 (рис. 1.1, б). Вследствие существенного влияния аэродинамического сопротивления поезда на общее сопротивление движению для пассажирских электровозов и электропоездов желательно сохранить расчетную мощность в диапазоне скоростей.
Если максимальные скорости электровозов или электропоездов увеличить до значений 200—250 км/ч, то кривые мощности и силы тяги будут иметь вид, представленный на рис. 1.1, 6 штриховыми линиями. На высокой скорости аэродинамическое сопротивление будет преобладающим по сравнению со всеми составляющими сопротивления движению, в том числе от сопротивления движению на подъемах. По этой причине здесь потребуется развить максимальную мощность на максимальной скорости. Естественно, что сила тяги должна сохраняться наибольшей как при разгоне, так и при максимальной скорости.
Электроподвижной состав с асинхронным тяговым двигателем, питающимися от тиристорного преобразователя, должен реализовывать эффективное электрическое торможение с возвратом энергии торможения в сеть. Для рассмотренного ЭПС мощность электрического тормоза, как правило, не превышает мощности тягового режима, поэтому кривые мощности и тормозных усилий обычно близки к соответствующим кривым тягового режима.
К электропоездам метрополитена предъявляются специфичные требования по мощности. В тяговом режиме пусковая мощность Рп обычно ограничена пропускной способностью устройств энергоснабжения (максимальным током на один вагон). Это обусловливает отношение скоростей на уровне vmax/vH0M = 2,54-3,5. В режиме электрического торможения нет жестких ограничений по устройствам электроснабжения, поскольку рекуперируемая энергия в значительной части потребляется соседними поездами, работающими в тяговом режиме.
Иными словами, мощность тягового двигателя в тормозном режиме должна по меньшей мере в 2 раза превышать пусковую мощность тягового режима. При этом скорость начала интенсивного торможения обычно в 2 раза превышает скорость выхода на пусковую мощность в тяговом режиме, поскольку предельные тяговые и тормозные усилия должны быть примерно одинаковыми. При скорости vmax иногда может потребоваться снижение мощности в тяговом и тормозном режимах по условию статической устойчивости асинхронных тяговых двигателей (см. п. 7.6).

Рис. 1.2. Характерные кривые мощности и силы тяги для электропоездов метрополитена
Приведенные на рис. 1.1, 1.2 кривые дают представление о нагрузках асинхронных тяговых двигателей ЭПС разных типов. Количественные соотношения даны приблизительно. Они уточняются в техническом задании на проектирование конкретного образца ЭПС.
По приведенным кривым мощности можно получить кривые токовых нагрузок, если задаться закономерностью изменения напряжения тягового двигателя во всем диапазоне изменения скоростей от 0. Здесь и далее будут приниматься в расчет фазные напряжения и токи тяговых двигателей, а также соединение обмоток статора в звезду.
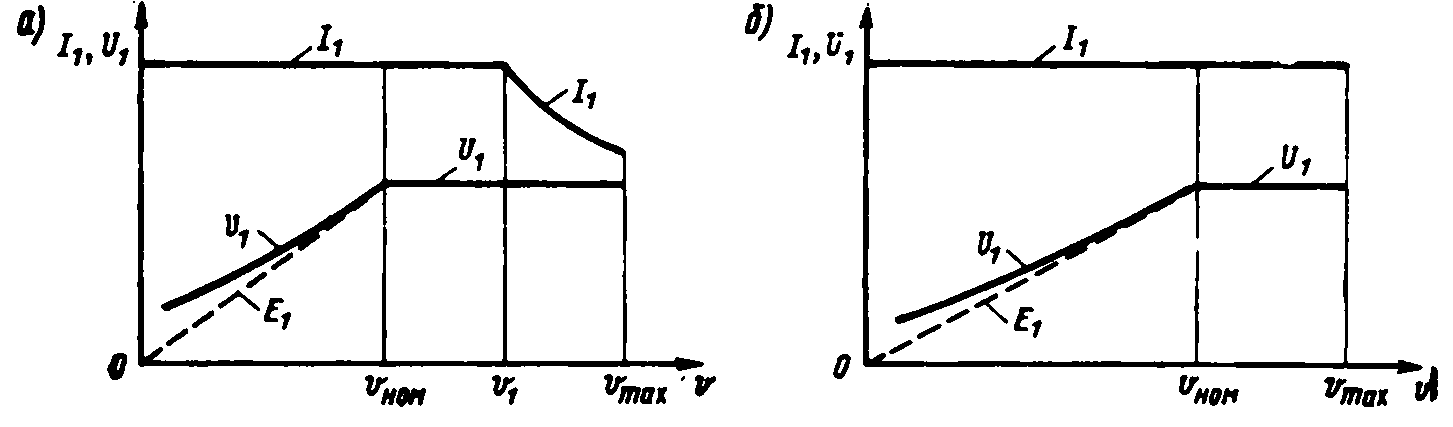
Рис. 1.3. Кривые фазных напряжений и токов для грузового электровоза (а) и магистрального скоростного электропоезда (б) (Е1—фазная ЭДС обмотки статора)
Для ЭПС большинства типов целесообразно сочетать номинальное напряжение U1ном с номинальной скоростью движения, полагая, что в диапазоне скоростей оно будет сохраняться неизменным, т. е. принять здесь = const. Иногда может оказаться целесообразным некоторое увеличение напряжения и в диапазоне скоростей.
Для обеспечения наибольшей и постоянной силы тяги в зоне разгона потребуется наибольший фазный ток,
также неизменный по значению. Эти соображения при заданном характере изменения мощности вполне определяют токовые нагрузки тяговых двигателей для рассмотренного ЭПС. Они приведены на рис. 1.3, а и б в качестве примера для грузового электровоза и магистрального скоростного электропоезда.
Естественно, что и кривые, приведенные на рис. 1.3, а и б, лишь приблизительно отражают истинные токовые нагрузки, которые уточняются для конкретного типа ЭПС.