При пуске или остановочном торможении асинхронной машины с заданным моментом необходимо по каналу регулирования напряжения на статоре поддерживать заданный ток статора. Из-за несинусоидальной формы тока, характерной для асинхронной машины при питании от преобразователя частоты, можно с целью упрощения контролировать не первую гармонику, а амплитудное значение фактической кривой тока статора. Поэтому в регулятор тока РТ (см. рис. 10.1) от формирователя уставок ФУ должна вводиться уставка амплитуды тока статора. При этом датчик Д1 должен измерять амплитудное значение тока статора и может выполняться в различных вариантах. В случаях когда преобразователь частоты содержит промежуточное звено постоянного тока, при амплитудном способе регулирования напряжения возможно построение системы управления с измерением входного тока инвертора. Устройство регулирования напряжения в этом случае аналогично тем, которые используются на ЭПС с тяговыми двигателями постоянного тока.
Если регулирование напряжения преобразователя частоты осуществляется внутренними средствами автономного инвертора (т. е. методом ШИМ), то система регулирования напряжения отличается от тех, которые используются для тяговых двигателей постоянного тока. В качестве примера рассмотрим два варианта устройств регулирования напряжения: методом синусоидальной ШИМ с использованием аналоговых устройств и методом ступенчатой ШИМ с использованием цифровых устройств.
В первом варианте используется трехфазный генератор синусоидального напряжения ГТ (рис. 10.7, а), работающий с изменяющейся частотой статора, которая задается регулятором частоты РЧ и постоянным синусоидальным трехфазным напряжением ис на выходе ГТ 152].
Синусоидальное напряжение ис сравнивается с сигналом генератора ГН, который формирует изменяющееся по форме напряжение ит. Частота напряжения равна частоте заполнения, с которой переключаются тиристоры инвертора. Напряжение генератора ГН в зависимости от управляющего сигнала Uy изменяет форму от треугольной до прямоугольной. Точки пересечения кривых определяются узлом сравнения УС, и таким образом формируются изменяющиеся по длительности τ импульсы управления тиристорами инвертора (рис. 10.7, б). Управляющий сигнал Uy, уровень которого определяет форму напряжения ит, длительность сигналов τ и выходное напряжение инвертора, является выходным сигналом регулятора тока статора РТ.
При втором варианте регулирования напряжения (рис. 10.8, а) полупериод выходного напряжения разбивается на К интервалов, и в пределах каждого интервала длительность импульсов управления тк неизменна [53]. Соотношение длительностей τ для различных интервалов выбирается таким, чтобы обеспечивалось удовлетворительное приближение формы кривой тока статора к синусоидальной.

Рис. 10.7. Структурная схема устройства регулирования напряжения методом синусоидальной ШИМ (а) н диаграмма импульсов управления (б)
Диаграмма импульсов управления инвертором (рис. 10.8, б) показана для случая, когда полупериод выходного напряжения разбит на шесть интервалов длительностью по 30°. Поэтому от регулятора частоты РЧ поступают сигналы с частотой 12, (см. рис. 10.8, а). На интервалах от 0 до 30° и от 150 до 180° длительность импульсов равна τ1, на интервалах от 30 до 60° и от 120 до 150° она равна τ2, причем τ2 >τ1. На интервалах от 60 до 90 и от 90 до 120° модуляция отсутствует. Использование ШИМ по ступенчатой функции позволяет построить систему регулирования напряжения с использованием цифровых устройств и отказаться от сравнительно сложного трехфазного генератора синусоидального напряжения регулируемой частоты.
В соответствии с диаграммой (см. рис. 10.8, б) формирование сигналов управления осуществляется из последовательностей импульсов регулируемой длительности τ1 и τ2, следующих с частотой заполнения и поступающих на входы мультиплексоров M1—М6. На управляющие входы мультиплексоров от датчика кода интервалов ДКИ подается изменяющийся каждые 30° код Ки, в соответствии с которым один из входных сигналов каждого мультиплексора передается на его выход. Датчик кода интервалов представляет собой счетчик на 12.
Длительность импульсов τ1, τ2 изменяется генератором импульсов регулируемой длительности ГРИ под контролем регулятора тока РТ. Импульсы управления (см. рис. 10.8, б) формируются на выходе одного из мультиплексоров для одного плеча инвертора. Использование шести мультиплексоров M1— М6 позволяет сформировать импульсы управления для шести плеч трехфазного инвертора с требуемой для трехфазной системы напряжений последовательностью.
Генератор импульсов регулируемой длительности (рис. 10.9) состоит из двух идентичных каналов формирования длительностей импульсов τ1 и τ2. Эти каналы отличаются только значением частоты, поступающей на счетный вход счетчика Сч1. На другой вход счетчика подаются импульсы с частотой заполнения. На выходе счетчика Сч1 формируется код длительности К1, (или К2).
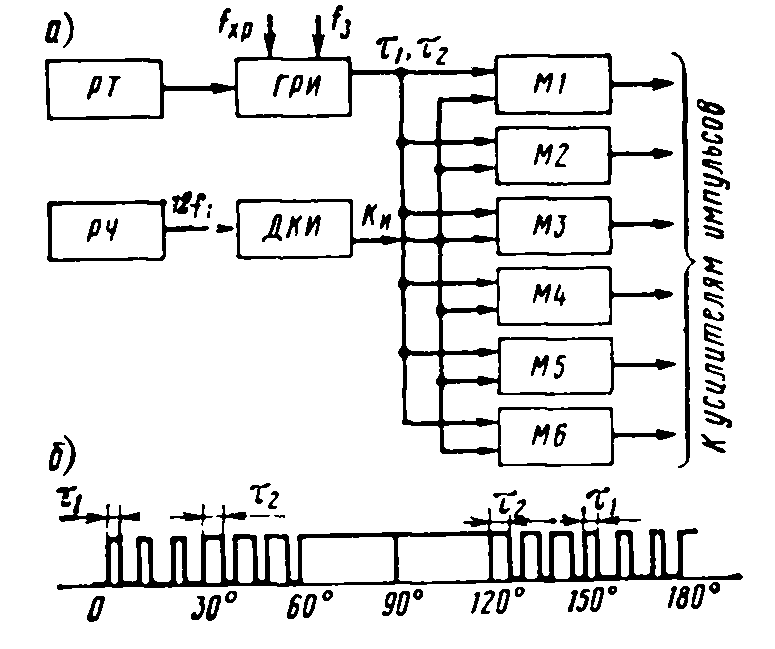
Рис. 10.8. Структурная схема устройства регулирования напряжения методом ступенчатой ШИМ (а) и диаграмма импульсов управления (о)
Основными узлами генератора являются: счетчики Сч1 и Сч2, сумматор CM, RS-триггер Т и логические схемы "И" и "НЕ". Счетчик Сч2 формирует текущий код длительности Κτ в результате поступления сигналов с частотой хронометрического пуска на счетный вход. Частота определяет максимальный темп увеличения длительности импульсов и минимальное время регулирования напряжения (до выхода за ШИМ).
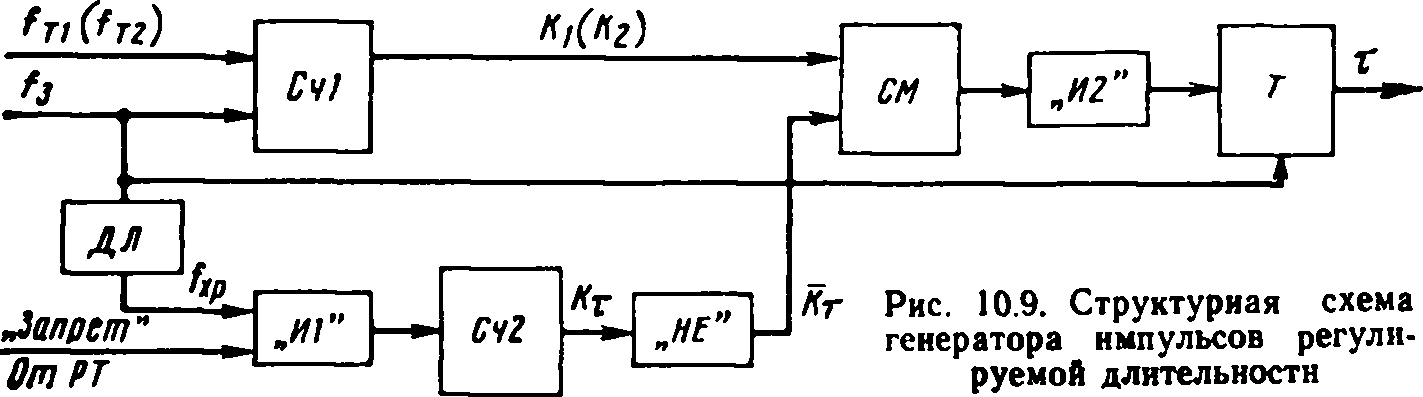
Счетчик Сч2 может находиться в режиме счета или в режиме хранения результата. В последнем случае поступление импульсов с частотой fxр блокируется сигналом запрета, приходящим на схему И1 от регулятора тока РТ. Код К с выхода Сч2 инвертируется схемой "НЕ", и далее код К поступает на вход сумматора СМ, где происходит сложение кода Κ1 (или K2) счетчика Сч1. При совпадении кодов К и Κ1 (К2) на всех выходах сумматора СМ появляются логические единицы, а на выходе схемы «И2» — логический «0». При этом триггер Т переключается и формирует задний фронт импульса длительностью т1 (или т2). Передний фронт импульсов т1 и т2 соответствует моменту поступления очередного импульса с частотой заполнения. В этот момент триггер Т и счетчик Сч1 переходят в исходное состояние. Разрядность счетчика Сч2 определяет дискретность регулирования длительности импульсов и значение максимального кода Ктах. Например, для восьмиразрядного счетчика Кх max = 256. Соответственно дискретность изменения длительности импульсов Δτ = 1/Ктах= = 1/256. Завершение процесса регулирования напряжения происходит в том случае, когда длительности импульсов τ1 становятся равными периоду частоты заполнения. В этом режиме К = К мах, поэтому тактовая частота, с которой работает счетчик Сч1,
![]()
Соотношение между длительностями обратно пропорционально тактовым частотам. Полное минимальное время регулирования напряжения до выхода определяется разрядностью счетчика Сч2 и частотой хронометрического пуска, и поэтому
![]() (10.24)
(10.24)
Из условий эксплуатации известно максимальное ускорение ЭПС и требуемое минимальное время пуска tn до выхода на полное напряжение. Сигналы с частотой формируются из частоты заполнения f3 с помощью делителя частоты Дл с переменным коэффициентом деления, что
позволяет при необходимости изменять частоту. Входящий в состав генератора импульсов регулируемой длительности счетчик Сч2 (см. рис. 10.9) может быть переведен в режим обратного счета. В этом режиме осуществляется уменьшение длительности импульсов управления и выходное напряжение инвертора снижается.
Рассмотренные цифровые системы регулирования частоты и напряжения (см. рис. 10.5 и 10.9) выполнены на основе аппаратных средств и относятся к цифровым системам «с жесткой логикой». В последнее время для управления преобразователями частоты на ЭПС все шире начинают применяться системы регулирования с использованием микропроцессорных устройств, которые позволяют формировать не только статические, но и динамические характеристики, повышая в целом качество управления тяговым приводом.