Как было показано в предыдущем параграфе, в тяговом электроприводе с асинхронным тяговым двигателем по каналу регулирования частоты статора, необходимо поддерживать заданное значение абсолютного скольжения. При этом частота f2 может быть постоянной или изменяться в зависимости от фактических значений скорости и напряжения на двигателе.
Задание текущего значения частоты ft в системе управления преобразователем может быть осуществлено как с использованием датчика скорости (частоты вращения), так и без такового. В последнем случае текущее значение f1 определяется по сигналам, поступающим от датчиков напряжения и тока асинхронного двигателя с последующей их обработкой вычислительными устройствами. Наряду с высоким качеством отработки динамических режимов работы тягового двигателя таким системам присущи недостатки, связанные со сложностью вычисления частоты f1 при включении системы после выбега, а при работе в области малых частот — сложностью измерения текущих значений токов и напряжений. Кроме того, при создании систем автоматического регулирования тяговым приводом, обеспечивающих высокие тягово- энергетические показатели, обязательным является введение устройств защиты от боксования (юза), которые наиболее просто выполняются с использованием датчиков частоты вращения колесных пар.
На ЭПС с асинхронными двигателями используются, как правило, регуляторы частоты с использованием датчиков скорости. В таких регуляторах в соответствии с выражением (10.4) частота статора формируется как сумма (в тяговом режиме) или как разность (в тормозном режиме) частот вращения ротора и заданного абсолютного скольжения. Суммирование (или вычитание) частот может производиться различными способами. Ниже будут рассмотрены два регулятора частоты, нашедшие применение в отечественных системах тягового асинхронного привода: регулятор с обратной связью по абсолютному скольжению (рис. 10.4) и цифровой регулятор прямого задания абсолютного скольжения.
Регулятор частоты с обратной связью по абсолютному скольжению (49, 50] был использован на электровозе ВЛ80а-751. Выходной сигнал в виде импульсов с частотой статора 12f1 формируется генератором ГЧС, причем частота определяется напряжением Uг на входе ГЧС.
Истинное значение абсолютного скольжения определяется с помощью дискретного вычитателя частот ДВЧ, на два входа которого поступают в импульсной форме сигналы двух частот: fвр от датчика скорости ДС и f1 от генератора ГЧС. С выхода ДВЧ импульсный сигнал с частотой f2 преобразуется в изменяющееся по уровню напряжение UCK, для чего используется преобразователь «частота скольжения — напряжение» ЧСН. Напряжение UCK сравнивается с напряжением U0, которое определяет заданное значение абсолютного скольжения f2уст. Выявленная таким образом ошибка регулятора в виде разности напряжений U0 и UCK поступает на вход интегрирующего усилителя ИУ.
После интегрирования сигнал суммируется с напряжением, которое пропорционально частоте вращения, поступающей от датчика ДС и преобразуемой в напряжение с помощью преобразователя «частота вращения — напряжение» ЧВН. Результирующее напряжение Uт подается на вход генератора ГЧС.
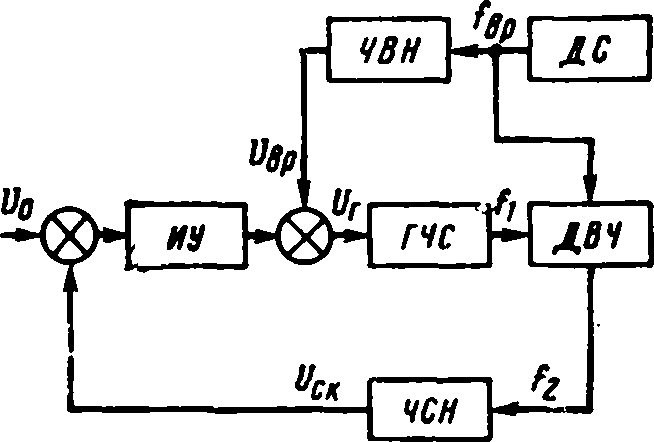
Рис. 10.4. Структурная схема регулятора частоты с обратной связью по абсолютному скольжению
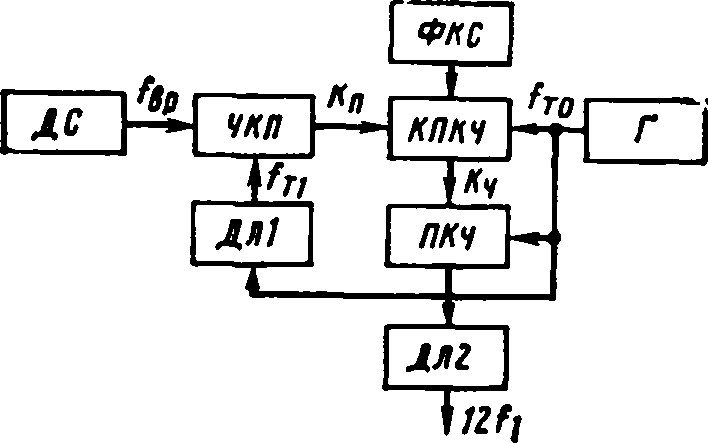
Рис. 10.5. Структурная схема цифрового регулятора частоты:
ФКС — формирователь кода заданного абсолютного скольжения; ДС -импульсный датчик скорости; ЧКП — преобразователь частоты вращения в код периода; КПКЧ — преобразователь кода периода в код частоты; Г — генератор тактовой частоты; Дл1, Дл2 —делители частоты; ПКЧ — преобразователь кода в частоту
Рассмотренный регулятор является астатическим с обратной связью по скольжению и с компенсацией по основному возмущению, т. е. с компенсацией по частоте вращения. Как показали испытания, данный регулятор обеспечивает стабилизацию абсолютного скольжения в пределах от 0,7 до 2 Гц с точностью 0,1 Гц при изменении частоты тока статора от 0,7 до 140 Гц.
Цифровой регулятор частоты (рис. 10.5) не требует преобразования импульсных сигналов в аналоговые, не содержит подстроечных элементов и обладает высокой точностью регулирования [51]. Регулятор выполнен на микросхемах серии К155. Генератор Г работает с частотой 1 МГц. Частота ротора асинхронной машины fвр измеряется импульсным датчиком скорости ДС, который механически связан с ротором машины.
Преобразователь «код — частота» ПКЧ (см. рнс. 10.5) работает с тактовой частотой и выполнен на основе делителя частоты с переменным коэффициентом деления. Частота на выходе ПКЧ fвых = fT0|b, причем коэффициент деления зависит от кода Кч.
В рассматриваемом регуляторе при n2 = 12 частота на выходе ПКЧ. Применение делителя Дл2 с коэффициентом деления 160 позволяет получить на выходе регулятора сигнал с частотой 12, который далее используется для управления автономным инвертором.
Код заданного абсолютного скольжения Кс, пропорциональный частоте тока ротора, задается с помощью формирователя кода скольжения ФКС. Поскольку частота должна изменяться в зависимости от заданного момента, а также (в зоне частот выше номинальной) и от частоты вращения, то формирователь ФКС может быть выполнен на основе аналого-цифрового преобразователя, преобразующего аналоговые сигналы, пропорциональные заданному моменту и частоте вращения, в код Кс.