Механическую устойчивость работы асинхронной машины в тормозном режиме рассматриваем при движении с установившейся скоростью. Если при случайном отклонении скорости от установившегося значения тормозной момент изменяется таким образом, что вызывает возвращение поезда к прежней скорости торможения ντ, то условие механической устойчивости выполняется. Это означает, что для механически устойчивой тормозной характеристики свойственно возрастание тормозного момента при увеличении скорости движения (или частоты вращения fвр генератора) и уменьшение тормозного момента при снижении fвр. Следовательно, тормозная характеристика устойчива в том случае, если производная момента по частоте вращения положительна (dMldfвр >0).
В параграфе 9.2 были рассмотрены тормозные характеристики асинхронного генератора для различных законов регулирования частоты и напряжения. Тормозные характеристики представлены на рис. 9.2. Из всех рассмотренных тормозных характеристик асинхронного генератора условию механической устойчивости dM/dfвp >0 удовлетворяет только одна — тормозная характеристика при f1= const и U1=const. Как уже отмечалось ранее, указанная тормозная характеристика отличается высокой жесткостью. Частота вращения fвр может возрастать при увеличении тормозного момента лишь на значение абсолютного скольжения f2, которое для тяговой асинхронной машины незначительно (1—2 Гц) и соответствует изменению скорости локомотива на 1—2 км/ч.
Поэтому режим работы асинхронного генератора при f1 = const к U1 — const весьма благоприятен для торможения поезда на затяжных спусках с неизменной скоростью.
В режиме f2 — const и Е— const тормозной момент при увеличении скорости снижается в квадратичной зависимости, а в режиме Р2 = const тормозной момент уменьшается в первой степени от скорости локомотива (см. с. 229). Поэтому для указанных режимов регулирования производная тормозного момента по частоте вращения dM/d/вр< 0, тормозные характеристики не обладают механической устойчивостью, и они не могут быть использованы для торможения поезда с заданной скоростью. Поскольку для рассматриваемых характеристик свойственно возрастание тормозного момента при уменьшении частоты вращения, их целесообразно использовать в зоне высоких скоростей для снижения скорости движения поезда.
Для характеристики М — const производная тормозного момента по частоте вращения dM/dfвp = 0 и условие механической устойчивости также не выполняется. Поскольку независимо от скорости локомотива тормозной момент остается постоянным, режим работы асинхронного генератора при М - const целесообразно использовать при остановочном торможении поезда с примерно постоянным замедлением.
Электрическую устойчивость работы тяговой асинхронной машины следует рассматривать при ее совместной работе с преобразователем. Важно отметить, что электрическая устойчивость режима торможения тяговой асинхронной машины при совместной работе с преобразователем частоты доказана практически на многочисленных образцах ЭПС. Полный анализ условий электрической устойчивости рассматриваемой системы достаточно сложен; здесь ограничимся рассмотрением физической сущности процессов. В качестве примера рассмотрим работу асинхронного генератора совместно с преобразователем частоты применительно к электровозу переменного тока в режиме рекуперативного торможения. При этом выпрямительная установка работает как ведомый сетью инвертор (ВСИ). Считаем, что преобразователь выполнен на основе автономного инвертора напряжения.
Условия электрической устойчивости системы «асинхронный генератор — АИН — ВСИ» рассматриваем при основном виде возмущения, т. е. при скачкообразном изменении напряжения в контактной сети. Скорость локомотива и частоту вращения вала генератора fвр из-за большой инерционности поезда за время переходного процесса принимаем неизменными. Если асинхронный генератор работает с заданным абсолютным скольжением f2 - const, то частота статора f2 — = (fвр — f2) также постоянна. Если же торможение осуществляется в режиме f2= const, то, поскольку fвр = const, абсолютное скольжение f2= (fвр — f1) также является постоянной величиной. Таким образом, в любом случае необходимо рассматривать характеристики асинхронного генератора при условиях f1= const и f2 = const.
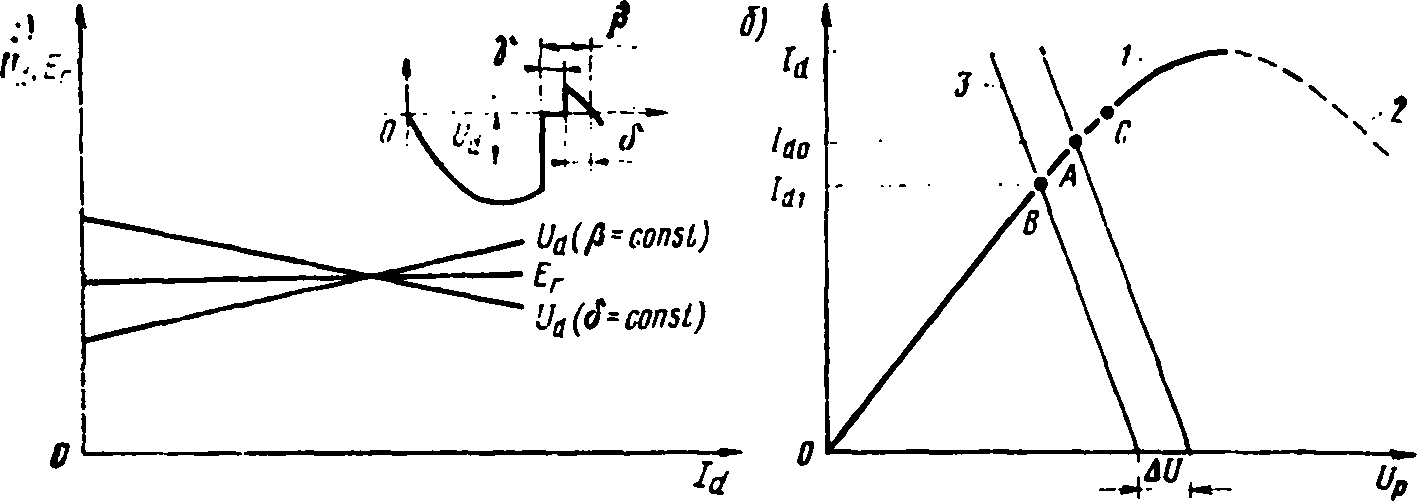
Рис. 9.7. Поясняющие диаграммы к анализу переходного процесса при снижении напряжения сети для генератора постоянного тока (а) и для асинхронного генератора (б)
Поскольку в качестве возмущения рассматривается изменение питающего напряжения и в преобразователе используется АИН, то целесообразно использовать регулировочную характеристику асинхронного генератора в функции выпрямленного напряжения: Uр — UdKp, которая была рассмотрена в параграфе 9.3.
Перед анализом системы «асинхронный генератор — АИН — ВСИ уместно напомнить условия электрической устойчивости традиционной системы «генератор постоянного тока с независимым возбуждением — ВСИ», используемой на серийных электровозах ВЛ60Р и ВЛ80р. Для генератора постоянного тока его нагрузочная характеристика Ег (fd) (рис. 9.7, а) не зависит от выпрямленного напряжения ВСИ Ua. По отношению к генератору постоянного тока ВСИ представляет собой только встречно включенный источник ЭДС. Чем выше напряжение ВСИ Ud, тем меньше ток рекуперации и тормозное усилие генератора. Поэтому на электровозах ВЛ60Р и ВЛ80р в начальной стадии рекуперации необходимо устанавливать большое значение Uj и затем постепенно его уменьшать для плавного наложения тормозного усилия.
На электровозах ВЛ60р и ВЛ80р с целью повышения коэффициента мощности ВСИ снабжен автоматическим регулятором, поддерживающим постоянный угол запирания. В таком режиме работы ВСИ, как известно, имеет ниспадающую нагрузочную характеристику Ud(ld), поскольку выпрямленное напряжение Ud уменьшается при увеличении тока рекуперации ld. Именно потому, что характеристики Ud(ld) и Еr(ld) являются нагрузочными характеристиками как ВСИ, так и генератора постоянного тока в функции общего параметра — тока ld, совместное рассмотрение этих характеристик позволяет анализировать условия электрической устойчивости данной системы.
Известно, что для системы «генератор постоянного тока — ВСИ» необходимым условием электрической устойчивости является выполнение неравенства dUd|dld >dEr|dId. Как следует из рис. 9.7, а, при работе ВСИ в режиме const это условие не выполняется, поэтому для достижения электрической устойчивости на электровозах ВЛ60Р и ВЛ80р используют стабилизирующие резисторы в цепи тока Id, в которых теряется до 20% рекуперируемой энергии.
Для асинхронного генератора, передающего энергию через АИН в звено постоянного тока, ВСИ является не только встречно включенным источником ЭДС. Принципиально важно, что при фиксированной частоте статора f1, напряжение ВСИ в звене постоянного тока Ud однозначно определяет магнитный поток асинхронного генератора (Ф=Ud/f1).
Было показано, что переходный процесс следует рассматривать для режима f1= const и f2 = const. При прочих равных условиях нагрузку асинхронной машины (в двигательном и генераторном режимах) однозначно характеризует абсолютное скольжение f2. Поскольку в рассматриваемом режиме f2 = const, зависимость Id(Ud) не может быть нагрузочной характеристикой асинхронного генератора. Как указывалось (см. с. 234), зависимость Id(Ud) представляет собой регулировочную характеристику, которая показывает, как изменяется ток U, поступающий от асинхронного генератора, если регулировать напряжение в звене постоянного тока (т. е. выпрямленное напряжение ВСИ). Можно снять экспериментально регулировочную характеристику Id(Ud) при фиксированных значениях f2 и f2 путем изменения напряжения Ud, но невозможно снять нагрузочную характеристику Ud(Id), так как физически нельзя изменить ток ld при f2 const и f1 = const, не изменив извне магнитный поток машины, т. е. не изменив напряжение Ud.
При использовании АИН регулировочная характеристика Id(Up) асинхронного генератора при f2 = const и f2 = const нелинейна (рис. 9.7, б): на ветви / по мере увеличения напряжения Up ток Id возрастает, а на ветви 2 — уменьшается. Ветвь 2 соответствует глубокому насыщению магнитной цепи машины и из рассмотрения исключается.
Ветвь 1 показывает, что на электровозе с асинхронными двигателями в начальной стадии рекуперации с целью получения малого начального тока рекуперации и тормозного момента напряжение ВСИ Ud следует устанавливать минимальным и затем постепенно его увеличивать. Этим электровоз с асинхронными двигателями принципиально отличается от электровоза с двигателями постоянного тока.
Рассмотрим характер переходного процесса при скачкообразном снижении напряжения сети. Пусть первоначально система «асинхронный генератор — АИН — ВСИ» работала в точке А и ток рекуперации был равен ld0. При снижении напряжения сети нагрузочная характеристика ВСИ перемещается на значение U (линия 3). Движение в системе возможно только по ветви 1, поскольку ft — const и f2=const. Движение к точке С не может иметь места, так как в этом случае должно было бы произойти увеличение магнитного потока асинхронной машины, а это противоречит причине переходного процесса (уменьшение напряжения Ud).
Снижение напряжения ΔU вызывает уменьшение магнитного потока асинхронного генератора, и движение в системе может происходить только к точке В, в результате чего ток уменьшается до значения Id1.
Важно отметить, что рассматриваемая система электрически устойчива независимо от наклона нагрузочной характеристики ВСИ, в том числе и в режиме const, поэтому не требуется включать в цепь силового тока стабилизирующие резисторы. Следовательно, на ЭПС с асинхронным тяговым двигателем возврат в сеть переменного тока энергии рекуперации может быть осуществлен более эффективно, чем на ЭПС с коллекторными тяговыми двигателями.
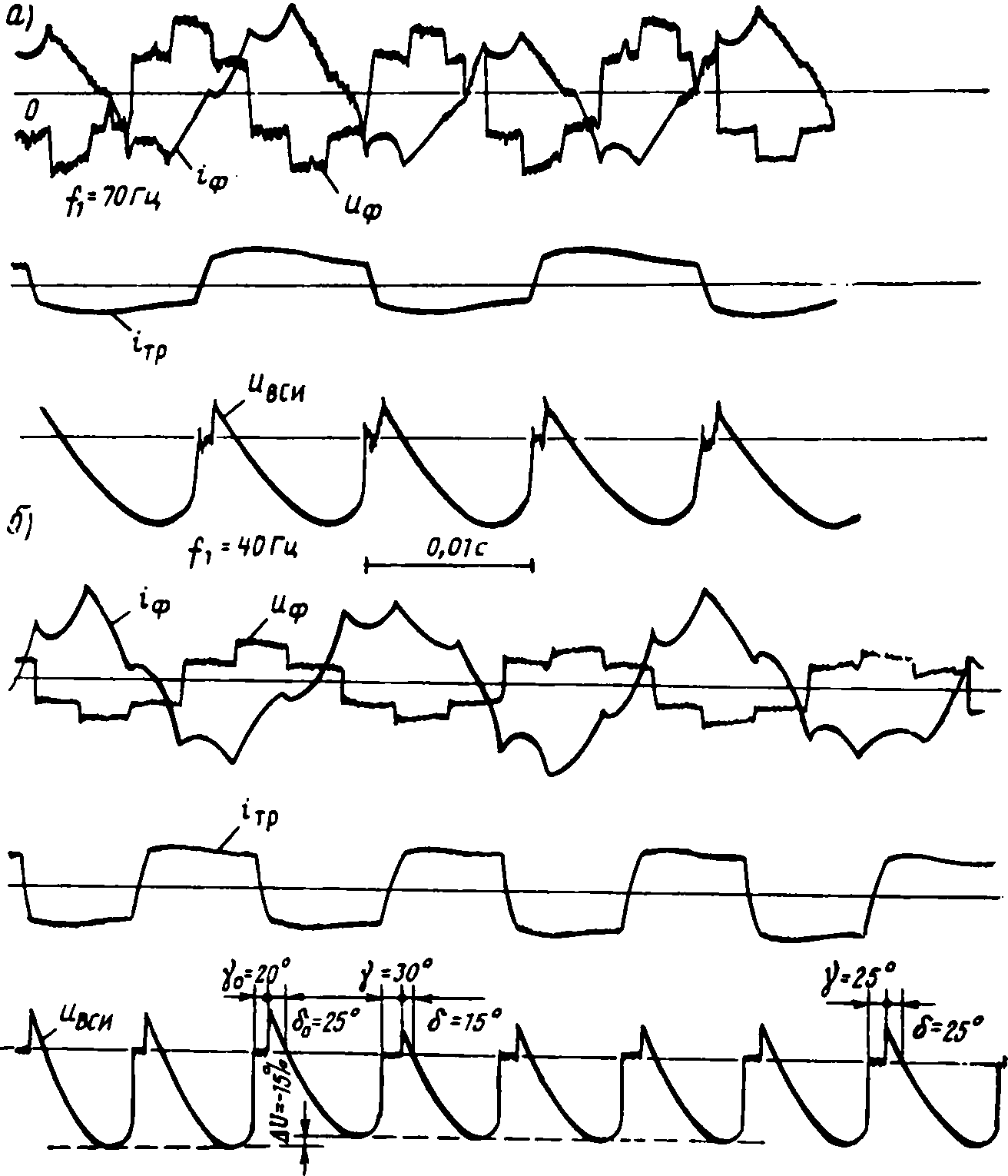
Рис. 9.8. Осциллограммы токов и напряжений при рекуперативном торможении тягового двигателя НБ-602 в стационарном режиме (а,) и в переходном режиме при снижении напряжения сети (б)
Электрическая устойчивость системы «асинхронный генератор — АИН — ВСИ» подтверждена экспериментально при рекуперативном торможении тягового двигателя НБ-602 с возвратом энергии в однофазную сеть частотой 50 Гц. При испытаниях ВСИ был оборудован автоматическим регулятором постоянного угла запирания и работал в режиме 6 — 25° без стабилизирующих резисторов. На рис. 9.8, а зафиксирован стационарный режим при частоте Д = 70 Гц и мощности на валу 900 кВт, а на рис. 9.8, б — переходный процесс при частоте f1=40 Гц и скачкообразном снижении напряжения сети на 15%.
Нестабильность по полупериодам кривой фазного тока асинхронной машины ίφ, как указывалось в параграфе 5.2, объясняется составляющими тока с комбинационными частотами, причем основные из них имеют частоты (100 — f1) Гц и (100 + f2) Гц. Как следует из осциллограмм рис. 9.8, нестабильность кривой тока iф не отражается на устойчивости режима рекуперативного торможения асинхронного тягового двигателя. Об устойчивости системы «асинхронный генератор — АИН — ВСИ» свидетельствует стабильность кривых напряжения ведомого сетью инвертора и тока вторичной обмотки трансформатора tTP. В случае скачкообразного снижения напряжения сети на 15%, как следует из осциллограммы рнс. 9.8, б, угол запирания ВСИ достигает своего заданного значения 25° и переходный процесс заканчивается по истечении двух периодов после момента снижения напряжения.