Остов асинхронного тягового двигателя.
При тяговом исполнении асинхронного тягового двигателя на остове необходимо иметь элементы крепления к раме тележки такие же, как у тяговых двигателей постоянного тока. Поскольку остов асинхронного тягового двигателя в отличие от остова тягового двигателя постоянного тока не является магнитопроводом, имеется большая свобода для выбора материала для него и конструкции отдельных узлов. Остов может быть предельно облегчен, а прочность его может быть получена вследствие использования ребер жесткости.
Так как асинхронные тяговые двигатели электровозов имеют симметричный в осевом направлении ротор, при надобности могут быть использованы моторно-якорные подшипники тяжелой серии с большим ресурсом работы. При сохранении осевой вентиляции размеры входных и выходных отверстий в остове для вентилирующего воздуха сохраняются. Возможно некоторое сокращение осевого их размера путем увеличения поперечного размера. В дополнительных люках, которые обычно используют в коллекторных тяговых двигателях для осмотра коллектора и смены щеток, надобность отпадает.
Поскольку лимитирующей по нагреву будет всегда обмотка статора, в перспективе может быть эффективен способ отвода тепла от статора с помощью тепловых трубок. В этом случае в принципе возможен только обдув воздухом внешней поверхности остова, что позволит значительно сократить расходы мощности на вентиляцию.
Есть предложения осуществить водяное охлаждение статора асинхронного тягового двигателя путем прокачки воды через полость между магнитопроводом и корпусом. Опытная проверка показала эффективность такой системы отвода тепла и возможность уменьшения габаритных размеров машины, хотя это связано с необходимостью иметь водяной радиатор с обдувом воздухом. Будут трудности также с обслуживанием водяной системы в зимнее время.
Магнитопровод и обмотка статора. Пазы магнитопровода для всех тяговых двигателей должны быть прямоугольные, поскольку сечение проводников будет значительным и всыпная обмотка непригодна. К тому же при использовании такой обмотки имеет место плохое заполнение паза и слабое закрепление проводников в пазу, что неприемлемо для тяговых двигателей.
Ввиду того что через воздушный зазор в асинхронном тяговом двигателе может быть пропущена небольшая часть вентилирующего воздуха, тепло от обмотки статора можно отвести, устраивая либо надпазовые каналы (рис. 7.6), либо обычные вентиляционные каналы в спинке магнитопровода статора. Надпазовые каналы увеличивают магнитную проводимость паза потокам рассеяния и потому неприемлемы при питании асинхронного тягового двигателя от инвертора тока.

Рис. 7.6. Форма пазов статора асинхронного тягового двигателя с надпазовыми каналами
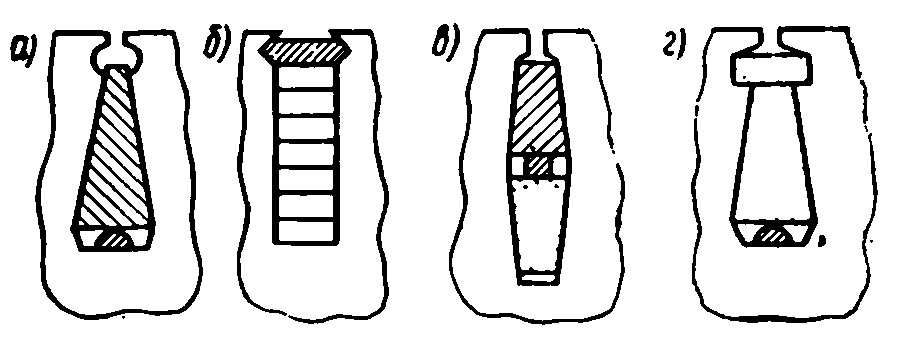
Рис. 7.7. Формы стержней роторной обмотки асинхронного тягового двигателя
При использовании надпазовых каналов часто вблизи воздушного зазора располагают еще один клин — магнитный — с целью уменьшения коэффициента воздушного зазора. Некоторое дополнительное увеличение проводимости потоку рассеяния паза может быть даже полезно, если асинхронный тяговый двигатель питается от инвертора напряжения с импульсным регулированием напряжения. Это приведет к меньшей высокочастотной пульсации тока.
Проводники обмотки статора должны быть всегда уложены «горизонтально», т. е. расположены меньшим размером к стенкам паза. Расчеты показывают, что для уменьшения потерь от вихревых токов, вызванных потоками рассеяния высших временных гармоник, необходимо иметь размер проводника по высоте паза 2—3 мм. Так как проводники статорной обмотки имеют небольшое сечение, в ней неизбежны параллельные цепи, особенно для асинхронных тяговых двигателей электровозов. Параллельные цепи выполняются, как обычно, в виде параллельных фазных групп.
Параллельное соединение проводников катушек не дает большого эффекта по снижению потерь от высших гармоник тока из-за значительных циркуляционных токов в контуре этих проводников.
Обмотка ротора.
К обмотке ротора асинхронного двигателя, питаемого от преобразователя частоты, должны быть предъявлены требования по сокращению потерь от вихревых токов высших гармоник. Поэтому конструкции роторных стержней, создающих повышенный эффект вытеснения тока в пазах, непригодны.
Роторные стержни в пазу должны быть прочно закреплены для обеспечения хорошего прилегания к стали магнитопровода. Желательно использовать упругие элементы закрепления стержней.
На рис. 7.7 показаны четыре варианта конструкций стержней ротора.
Стержни, представленные на рис. 7.7, а, использованы в тяговом двигателе НБ-602. Они могут обеспечить прочное закрепление стержней в пазу. Однако в них значителен эффект вытеснения тока, что приемлемо лишь для нерегулируемых по частоте асинхронных двигателей, в которых этот эффект приводит к улучшению пусковых качеств. для асинхронных тяговых двигателей проявление этого эффекта нежелательно из-за увеличения добавочных потерь от высших гармоник. Конструкция стержня ротора, представленная на рис. 7.7, б, применена в асинхронном тяговом двигателе НБ-607. Она технологична, эффект вытеснения тока выражен слабее, чем в рассмотренном стержне (см. рис. 7.7, а). Однако открытые пазы ротора приводят к росту магнитного напряжения на воздушный зазор и увеличению добавочных потерь от пространственных гармоник зубцовой частоты ротора на поверхности и в зубцах статора.
Хорошее прилегание стержней к стенкам паза и упругое их закрепление достигаются конструкцией стержня, показанного на рис. 7.7, в. Небольшая клиновидность стержня обеспечивает благоприятную форму зубца, малое напряжение на зубцовом слое ротора при умеренных индукциях в ней. Стержень по рис. 7.7, г обеспечивает уменьшение добавочных потерь, но нетехнологичен.
Для асинхронных тяговых двигателей электропоездов и даже электровозов можно для роторной обмотки использовать алюминий. Предпосылками для этого являются: сравнительно небольшая МДС роторной обмотки, возможность расположить на роторе стержни увеличенного сечения.
Вторая предпосылка связана с тем, что в роторной обмотке отсутствует изоляция, а также с тем, что форма паза может быть выбрана более благоприятная, так что магнитное напряжение на зубцах будет невелико при их значительной глубине (например, такой, как на рис. 7.7, в).
Целесообразность изготовления роторной обмотки заливкой ее алюминием или его сплавом неочевидна даже для асинхронных тяговых двигателей средней мощности (100ч-150 кВт). Опыт показывает, что в стержнях ротора при заливке образуются поры, могущие в сильной степени повлиять на сопротивление роторной обмотки. Это нежелательно даже для нерегулируемых асинхронных двигателей и может оказаться совершенно неприемлемым для асинхронных тяговых двигателей, работающих на «общий вал» через механизм сцепления колес с рельсами. По-видимому, приемлемым конструктивным решением при использовании алюминия будут опрессованные стержни заданных сечения и формы.
Воздушный зазор. Иногда высказывается мнение, что у асинхронного тягового двигателя будет понижена эксплуатационная надежность из-за небольших воздушных зазоров. Для таких опасений нет оснований. Наибольший радиальный зазор моторно-якорных подшипников составляет 0,1 мм. Вал ротора может быть выбран таким, что его прогиб будет минимальным во всех возможных режимах.
Обычно рекомендуется рассчитывать воздушный зазор, мм, по формуле
![]()
где Da — диаметр расточки статора.
Для электровозного асинхронного тягового двигателя он составит около 1,5 мм. Однако нет надобности выбирать столь малое значение зазора. Расчеты показывают, что оптимальное значение зазора для этих двигателей составляет 2—3 мм. Оптимальное значение следует определять исходя из роста потерь от пространственных гармоник поля на поверхности ротора и статора, а также потерь, вызванных увеличением реактивной составляющей тока. С увеличением зазора первые потери снижаются, а вторые увеличиваются.
Надо отметить, что конструкция асинхронного тягового двигателя еще не прошла достаточно полной эксплуатационной проверки и элементы его будут совершенствоваться. Так, до сих пор не вполне ясно, будет ли повреждаться статорная обмотка при практически незакрепленных лобовых вылетах. Пока их жесткость обеспечивается в основном пропиткой цементирующими лаками. Однако конструкция закрепления лобовых вылетов может быть предложена. По-видимому, она будет необходима при опорно-осевом подвешивании тягового двигателя.
Напряжение и число полюсов статорной обмотки. На электровозах переменного тока низшее напряжение тяговой обмотки трансформатора выбирается из условий оптимального проектирования тиристорного преобразователя, тягового двигателя, а также с учетом требований монтажа схемы силовой цепи и дополнительного силового оборудования. Обычно фазное напряжение находится в пределах 700—1500 В. На ЭПС постоянного тока при отсутствии трансформатора фазное напряжение на тяговом двигателе обусловлено напряжением контактной сети. В этом случае связь между подведенным к преобразователю напряжением постоянного тока Ud и фазным напряжением тягового двигателя Ux будет: для инвертора тока Ud = 2,22 Ux cos для инвертора напряжения Ud = 2,22 Ux.
В отдельных случаях на ЭПС постоянного тока может быть использован тиристорный делитель напряжения. В этом случае напряжение Ud будет меньше напряжения контактной сети.
Число полюсов тягового двигателя ограничено сверху рабочей частотой инвертора при максимальной скорости движения, т. е. обусловлено оптимальным проектированием преобразователя. С ростом числа полюсов уменьшается коэффициент мощности для первых гармоник напряжения и тока и увеличиваются потери в стали.
Уменьшение числа полюсов приведет к увеличению радиального размера спинки магнитопровода статора, при этом снизится рабочая частота (для частоты вращения ротора, выбранной по условию наибольшего значения передаточного отношения редуктора). Снижение числа полюсов и рабочей частоты асинхронных тяговых двигателей необходимо при введении в инвертор импульсной модуляции напряжения для уменьшения коммутационных потерь. С учетом приведенных соображений для высокоскоростных асинхронных тяговых двигателей (п.ном= 18004-2000 об/мин) при использовании в инверторе импульсной модуляции можно принять 2р= 4; для асинхронных тяговых двигателей, у которых 8004-900 об/мин и 15004-2000 об/мин; для безредукторного тягового привода.