Асинхронная машина способна перейти в генераторный режим при выполнении двух условий: 1) частота вращения ротора fвр должна быть выше частоты вращающегося магнитного поля статора f2, при этом абсолютное скольжение ротора f2= f1 — fвр — отрицательная величина; 2) должно быть обеспечено поступление в обмотки статора реактивной составляющей тока, необходимой для создания магнитного потока.
Первое условие обычно выполняется с помощью автоматического регулятора частоты, который измеряет частоту вращения ротора fвр и осуществляет регулирование частоты статора в соотношении f2 = fвр ± f2уст, причем в режиме тяги регулятор суммирует заданную уставку абсолютного скольжения f2уст с частотой fвр. При переводе машины из тягового в тормозной режим регулятор частоты f2 необходимо перевести из режима суммирования значений fвр и f2уcт в режим вычитания.
Выполнение второго условия зависит от конкретного варианта питающей сети и схемы преобразователя.
В дальнейшем будем считать, что перевод асинхронной машины в генераторный режим производится только при наличии напряжения в контактной сети, поскольку по требованиям безопасности в случае исчезновения питающего напряжения машинист должен остановить поезд пневматическим тормозом. Поэтому не рассматриваем способы реализации реостатного торможения асинхронной машины при отсутствии питающего напряжения. Электроснабжение электрифицированных железных дорог имеет высокую степень резервирования, и перерывы питания наблюдаются весьма редко. В этой связи следует отметить, что на электровозах Е-120 производства ФРГ система независимого от сетевого напряжения резисторного торможения была демонтирована, так как опыт эксплуатации показал, что случаи перерыва питания крайне редки и достаточно иметь на электровозе только систему рекуперативного торможения. Вначале рассмотрим процесс перевода тяговой асинхронной машины в генераторный режим при использовании в преобразователе автономного инвертора тока. При этом важно иметь в виду, что если заданное абсолютное скольжение fауст уменьшить до нуля, то на выходе регулятора частоты получим f1= fвр, т. е. асинхронная машина будет работать в режиме синхронной скорости. Если при этом на статор подано напряжение, то по его обмоткам протекает только намагничивающий ток, а момент машины равен нулю, т. е. условие f2уст = 0 соответствует режиму выбега локомотива.
Согласно принципу работы АИТ направление входного тока Id остается неизменным в двигательном и генераторном режимах асинхронной машины. Поэтому перед торможением следует вначале с помощью регулятора частоты перевести машину в режим синхронной скорости при f2густ = 0. При этом на инвертор должно быть подано напряжение Ud, полярность которого является для инвертора прямой, т. е. соответствующей тяговому режиму асинхронной машины. Напряжение Ud при этом незначительно, поскольку ток Id должен быть равен намагничивающему току, т. е. составлять примерно 30% номинального тока статора. При таких условиях асинхронная машина находится в режиме холостого хода и имеет магнитный поток, близкий к номинальному.
Перевод машины в генераторный режим заканчивается увеличением абсолютного скольжения до заданного значения f1уст с одновременным изменением полярности напряжения Ud на обратную (соответствующую генераторному режиму). Напряжение Ud должно быть затем увеличено для достижения заданного тока Id.
Последняя операция, т. е. изменение полярности напряжения Ud и регулирование его значения, наиболее просто может быть выполнена при питании АИТ через управляемый выпрямитель от сети переменного тока. В этом случае выпрямитель УВ (рис. 9.9, а) путем изменения угла отпирания тиристоров переводится из режима выпрямления в режим ведомого сетью инвертора ВСИ.
При питании от сети постоянного тока для изменения полярности напряжения Ud на входе инвертора требуются более сложные схемотехнические решения. В качестве примера на рис. 9.9, б представлена схема, реализованная фирмой Siemens на вагонах метрополитена.
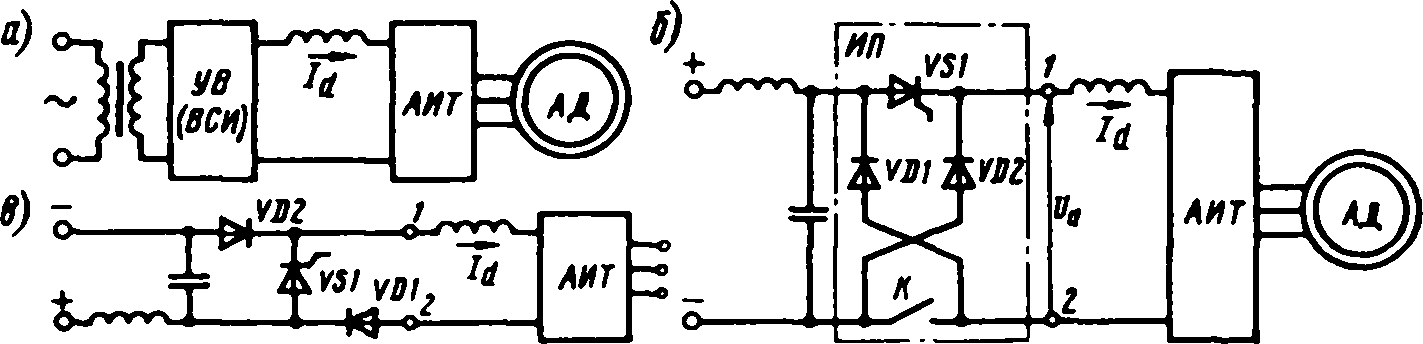
Рис. 9.9. Схемы преобразователей на основе ЛИТ для режимов тяги и торможения
В тяговом режиме контактор К замкнут, напряжение Ud и ток Id регулируются с помощью тиристорного импульсного прерывателя ИП. При этом полярность напряжения на входе АИТ прямая (точка 1 подключена к «плюсу» Ud). Во время закрытого состояния ключа VS1 ток Id замыкается через диод VD2.
При переводе ЭПС в тормозной режим вначале осуществляется режим холостого хода асинхронной машины при f2уст = 0 и ток Id устанавливается на уровне номинального тока намагничивания. Затем выключается контактор К. В результате, как показано на рис. 9.9, в, полярность напряжения на входе АИТ становится обратной, поскольку к «плюсу» питающего источника через диод VD1 подключена точка 2. Регулирование напряжения Ud и тока Id производится с помощью ключа VS1, который периодически соединяет накоротко точки 1 и 2. Диод VD2 при этом исключает режим короткого замыкания питающего источника.
Перейдем к рассмотрению процесса перевода асинхронной машины в генераторный режим при использовании преобразователя с автономным инвертором напряжения, в цепях обратного тока которого используются диоды. Согласно принципу работы такого инвертора при переводе асинхронной машины из двигательного в генераторный режим полярность напряжения Ud на входе остается неизменной, а направление среднего (выпрямленного) тока Id изменяется на противоположное (рис. 9.10). Поэтому наиболее просто перевести асинхронную машину из двигательного в генераторный режим можно в том случае, если питающий источник обладает двусторонней проводимостью.
Таким свойством обладает сеть постоянного тока при ее непосредственном подключении к входу АИН (рис. 9.11, а). Считаем, что в инверторе напряжение регулируется внутренними средствами (методом ШИМ). В этом случае перевод асинхронной машины в генераторный режим осуществляется весьма просто и могут быть использованы два способа: без отключения инвертора от питающей сети и с отключением. В первом случае вводимую в регулятор частоты уставку скольжения вначале уменьшают до нуля и асинхронная машина переходит в режим холостого хода, потребляя намагничивающий ток, а ток Id практически становится равным нулю (рис. 9.10, б). Затем путем переключения регулятора в режим вычитания частот и повышения уставки абсолютного скольжения f1уст до требуемого значения переводят асинхронную машину в генераторный режим.

Рис. 9.10. Принципиальная схема ЛИН и диаграммы его напряжения и токов в режимах тяги (а), холостого хода (б) и торможения (в)

Рис. 9.11. Схемы преобразователей на основе АИН для режимов тяги и торможения
Во втором случае вследствие прекращения подачи управляющих импульсов на тиристоры инвертора отключают асинхронную машину от питающей сети. Локомотив при этом движется в режиме выбега, магнитный поток машины равен нулю. Перед вводом машины в генераторный режим переключают регулятор в режим вычитания частот, вводят в него заданное абсолютное скольжение и включают цепи, подающие на тиристоры сигналы управления. Напряжение на выходе инвертора постепенно повышают. Реактивная составляющая тока, создающая магнитный поток в асинхронной машине, поступает через тиристоры инвертора, которые подключены по отношению к полярности питающего напряжения сети в прямом направлении.
Первый из рассмотренных способов целесообразно применять в тех случаях, когда требуется быстро перевести машину из тягового в тормозной режим, второй способ — когда после прекращения тягового режима локомотив довольно продолжительное время движется в режиме выбега.
На линиях, электрифицированных по системе переменного тока. АИН получают питание через однофазный выпрямитель. Условие двусторонней проводимости питающего источника выполняется только в том случае, если встречно-параллельно выпрямителю В включен ведомый сетью инвертор ВСИ (рис. 9.11, в). Отметим, что четырехквадрантный преобразователь, используемый на электровозах Е-120 производства ФРГ и на советско-финском электровозе ВЛ86ф (см. главу 4), по существу состоит из параллельно соединенных диодного выпрямителя и тиристорного сетевого инвертора с принудительной коммутацией. При условии двусторонней проводимости выпрямительного звена перевод асинхронной машины из двигательного в генераторный режим может быть произведен теми же двумя способами, которые рассмотрены при питании АИН от сети постоянного тока.
Однако выполнение выпрямителя с двусторонней проводимостью увеличивает вдвое мощность выпрямительного звена преобразователя, заметно усложняя электрооборудование и увеличивая его массу и габаритные размеры. Поэтому более рациональной является схема, представленная на рис. 9.11, г. Здесь в тяговом и тормозном режимах используется одна и та же тиристорная выпрямительная установка, которая в тяговом режиме работает как управляемый выпрямитель, а в тормозном режиме — как ведомый сетью инвертор. При окончании тягового режима путем прекращения подачи управляющих импульсов на тиристоры выпрямителя снижают напряжение и магнитный поток машины до нуля. Переводят двухпозиционный тормозной переключатель ТП в режим торможения, регулятор частоты — в режим вычитания частот и устанавливают требуемое значение абсолютного скольжения.
Затем по каналам управления тиристорами переводят выпрямительную установку в режим ведомого сетью инвертора ВСИ.
Для возбуждения магнитного потока в обмотки статора асинхронного генератора должна поступать реактивная составляющая фазного тока через тиристоры АИН. Поскольку полярность выпрямленного напряжения ВСИ является обратной по отношению к тиристорам АИН, ВСИ не может обеспечить первоначальное возбуждение асинхронного генератора после выбега. Поэтому включением контактора К на АИН следует кратковременно подать прямое для тиристоров АИН напряжение от маломощного вспомогательного диодного выпрямителя ВВ. После возбуждения асинхронного генератора контактор К выключают. Реактивная составляющая тока машины продолжает поступать через тиристоры АИН от обратных диодов других фаз, так как в АИН происходит обмен реактивной энергией между фазами асинхронной машины. Так, на интервале от φ1 до 180° ток в тиристор VS1 и далее в обмотку фазы А поступает или от фазы В через диод VD3, или от фазы С через диод VD5 (см. рис. 9.10).
На последней стадии перевода асинхронной машины в генераторный режим постепенно повышают выпрямленное напряжение ВСИ и соответственно ток Id до требуемых значений.
Осциллограмма процесса входа тягового двигателя НБ-602 в режим рекуперативного торможения при возбуждении от вспомогательного выпрямителя ВВ дана на рис. 9.12, а. Из осциллограммы следует, что вход в режим рекуперативного торможения завершается примерно за 0,3 с после включения выпрямителя ВВ и за это время происходит плавное возрастание напряжения и тока генератора uф и ίΦ.

Рис. 9.12. Осциллограммы процесса входа асинхронного тягового двигателя в режим рекуперативного торможения (а) и кривой фазного тока двигателя при подключении к входу инвертора источника переменного напряжения (б)
При этом ведомый сетью инвертор из режима прерывистых токов плавно переходит в режим непрерывного тока, о чем свидетельствуют кривые напряжения u/вси и тока вторичной обмотки трансформатора iτρ.
Таким образом, экспериментально подтверждено, что и в случае подачи на фильтровый конденсатор переменного напряжения с частотой принадлежащей согласно уравнениям (9.23) области самовозбуждения, неконтролируемый переход асинхронных тяговых двигателей в генераторный режим не имеет места. Следовательно, при питании от АИН входной индуктивно-емкостный фильтр не создает условий для самовозбуждения и неконтролируемого перехода двигателя в тормозной режим.
Перевод асинхронной машины в генераторный режим возможен только при изменении знака абсолютного скольжения в регуляторе частоты. Результаты данных исследований также подтвердили, что фильтровый конденсатор Сф, установленный на входе АИН, благодаря преобразованию частот в инверторе не способен осуществить самовозбуждение асинхронной машины при переводе ее в режим электрического торможения без подачи напряжения в прямом для основных тиристоров направлении.
При реализации электрического торможения тяговой асинхронной машины определенные преимущества дает автономный инвертор напряжения, в цепях обратного тока которого вместо диодов используются тиристоры.
Как указывалось в главе 9, такой режим целесообразно использовать для торможения поезда на спусках с постоянной скоростью.
Кроме того, в схеме должен присутствовать реверсивный переключатель РП, который воздействует на систему управления преобразователем СУ и производит реверсирование асинхронной машины путем изменения чередования импульсов управления тиристорами двух фаз инвертора.