Глава IV. РЕГУЛИРОВАНИЕ СКОРОСТИ И ПУСК ПОДВИЖНОГО СОСТАВА.
§ 10. РЕГУЛИРОВАНИЕ СКОРОСТИ.
Из теории электрических машин известно, что электродвижущая сила (э. д. с.), индуктируемая в обмотке якоря машины постоянного тока, выражается как Е = спФ, (4)
где п — скорость вращения якоря;
Ф — магнитный поток;
с — постоянная.
При тяговом режиме в двигателе происходит преобразование электрической энергии в механическую. Приложенное к двигателю напряжение U больше его электродвижущей силы, т. е. Е. Уравнение электрического равновесия между приложенным к двигателю напряжением, его э. д. с. и падением напряжения в силовой цепи Ir имеет вид:
![]() (5)
(5)
На основании (4) и (5) получаем следующее выражение для скорости вращения якоря:
![]() (6)
(6)
Так как скорость поезда ν пропорциональна п, окончательно имеем:
![]() (7)
(7)
где I — ток, потребляемый силовой цепью двигателя;
Ф — магнитный поток;
r — электрическое сопротивление обмоток силовой цепи двигателя (якоря, главных и добавочных полюсов);
С — постоянная, зависящая от параметров двигателя, передаточного числа редуктора и диаметра движущего колеса.
Из анализа формулы (7) следует, что скорость поезда можно регулировать изменением напряжения, подведенного к тяговым двигателям, или величины магнитного потока.
Напряжение на тяговых двигателях при заданном напряжении в контактной сети можно изменить: 1) регулируя сопротивление в силовой цепи двигателя; 2) при помощи преобразователей и 3) перегруппировкой тяговых двигателей при количестве двигателей больше единицы. Первый способ связан с большими потерями энергии. Он неэкономичен и может применяться только при кратковременной работе — пуске двигателей. Второй способ требует дополнительного оборудования. Основным является третий способ регулирования скорости, так как он вполне экономичен и не требует существенного дополнительного оборудования.
Перегруппировка тяговых двигателей, т. е. применение различных способов их соединения, возможна при двух и более тяговых двигателях на вагоне или на троллейбусе (z ≥ 2). Общее правило при перегруппировке двигателей — переход от ступени соединения с меньшим напряжением на двигателе к ступени соединения с большим напряжением![]() .
.
Каждому способу
соединения соответствует ступень регулирования скорости, не связанная с потерями энергии в пусковых сопротивлениях. Такие ступени носят название экономических ступеней скорости или ходовых позиций.
Двухступенчатая перегруппировка при двух тяговых двигателях (рис. 21) может быть применена в одном варианте: I ступень — последовательное соединение, напряжение на двигателе![]()
II ступень — параллельное соединение, U = Uc, где Uc — напряжение сети. Такая перегруппировка применяется на двухосных трамвайных вагонах всех типов и на троллейбусе типа ТС.

Рис. 21. Принципиальные схемы соединения двух тяговых двигателей (двухступенчатая перегруппировка)
- ступень — последовательное соединение;
- ступень — параллельное соединение
Рис. 22. Принципиальные схемы соединения четырех тяговых двигателей:
I — последовательного возбуждения (а — последовательное; б — последовательнопараллельное; в — параллельное соединение); II — смешанного согласного возбуждения (а — последовательное; б — последовательно-параллельное; в — параллельное соединение)
Двухступенчатая перегруппировка при четырехтяговых двигателях (рис. 22) возможна в следующих вариантах.
Первый вариант: I ступень — последовательное соединение (схема Ζ, а),![]()
II ступень — последовательно-параллельное соединение (схема I, б),
Двухступенчатая перегруппировка тяговых двигателей применяется на вагонах трамвая и метрополитена всех типов. Исключение составляют трамвайные вагоны с автоматической системой косвенного управления без перегруппировки: вагоны РВЗ — двигатели постоянно соединены по схеме II, б, вагоны «Татра» — по схеме I, б (рис. 22).
Трехступенчатая перегруппировка возможна при четырех и более тяговых двигателях. На четырехосных вагонах возможно применение только одного варианта (см. рис. 22). I ступень — последовательное соединение (схема а); II ступень — последовательно-параллельное соединение (схема б) и III ступень — параллельное соединение всех тяговых двигателей (схема в). Трех ступенчатая перегруппировка в моторвагонной тяге не применяется, так как она связана со значительным усложнением электрической схемы вагона. Этот способ широко применяется в электровозной тяге с двигателями последовательного возбуждения на шестиосных электровозах ВЛ.
Регулирование скорости изменением магнитного потока.
Магнитный поток в двигателях последовательного возбуждения регулируют:
- изменением величины тока возбуждения шунтированием обмотки и
- изменением числа витков обмотки возбуждения.
Принципиальные схемы изменения скорости способом шунтирования приведены на рис. 23 (схема а — с одной ступенью регулирования скорости, схема б — с двумя ступенями). При нормальном магнитном поле контактор 1 разомкнут и весь ток I протекает по обмотке возбуждения. Для ослабления поля замыкают контактор 1, вследствие чего через обмотку возбуждения будет протекать ток Iв = I — Im, уменьшится магнитный поток и при том же токе в якоре увеличится скорость. В схеме б первая ступень ослабления поля получается при включении контактора 1, а вторая ступень — при включении контакторов 1 и 2; в цепи шунта выключается сопротивление r2> уменьшается ток возбуждения и магнитный поток — ступень наивысшей скорости. Регулирование скорости шунтированием применяется на трамвайных вагонах при системах непосредственного (с многопозиционными контроллерами) и косвенного управления (например, вагоны Т2).
При регулировании магнитного потока посредством отключения части витков обмотка должна быть секционированной (схема в, рис. 23). При одной ступени секционирования обмотка состоит из двух секций и W2. При полном поле включенное число витков W = Wr + W2 (контактор 1 выключен), а при ослаблении поля (включением контактора 1 с последующим выключением контактора 2) W = Wr (витки W2 выключены).
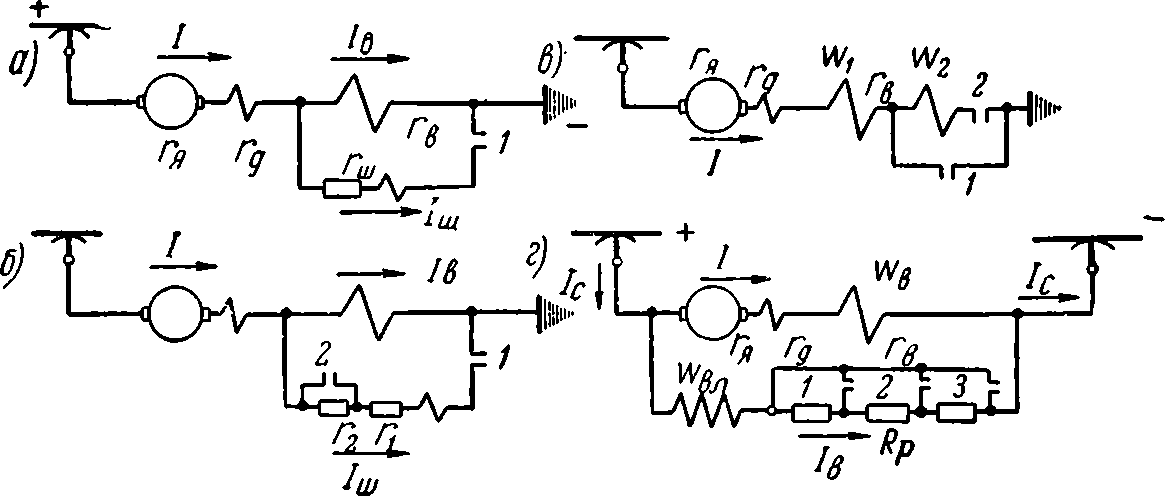
Рис. 23. Принципиальные схемы регулирования скорости изменением магнитного потока
а и б — шунтировкой поля; в — секционированием; г — регулировочным реостатом в цепи параллельного возбуждения
В двигателях смешанного возбуждения регулирование поля осуществляется проще, чем в двигателях последовательного возбуждения: изменяется величина сопротивления в цепи параллельной обмотки (рис. 23, г). При изменении величины регулировочного сопротивления изменяется и ток возбуждения Iв. Посредством регулировочного реостата легко получить ряд экономических ступеней скорости. При этом в реостате возникают потери энергии, но так как ток возбуждения составляет лишь небольшую часть тягового тока (3—5%), а потери мощности пропорциональны квадрату тока, то эти потери не превышают 1% мощности, потребляемой из сети.