Управление подвижным составом связано с рядом различных включений и переключений в электрических цепях, необходимых для пуска и регулирования его скорости, а также электрического торможения. Эти операции производятся при помощи аппаратуры управления.
Система управления, при которой переключения в цепи тяговых двигателей, необходимые для пуска, регулирования скорости и торможения поезда, производятся контроллером, приводимым в действие непосредственно водителем, называется системой непосредственного управления. При системе косвенного управления все необходимые переключения в цепи тяговых двигателей производятся специальными аппаратами — индивидуальными или групповыми контакторами, которые управляются при помощи контроллера цепи управления, приводимого в действие водителем. Косвенное управление по существу является системой управления на расстоянии и может быть названо дистанционным.
На рис. 17 приведены простейшие принципиальные схемы непосредственного и косвенного управления подвижным составом. Косвенные системы управления подразделяются на неавтоматические и автоматические.
К системам управления современного подвижного состава предъявляются следующие требования: 1) обеспечение плавного пуска и торможения при высоких значениях ускорений и замедлений; 2) возможность регулирования скорости в широких пределах; 3) автоматизация основных процессов управления; 4) минимальные габаритные размеры и вес оборудования и удобное его обслуживание; 5) надежность работы оборудования; 6) возможно меньшая стоимость подвижного состава и его оборудования.
Аппаратура силовой цепи как системы непосредственного, так и косвенного управления должна обеспечивать выполнение следующих функций, связанных с управлением тяговыми двигателями: 1) соединять силовую цепь с контактной сетью и рельсами; 2) перегруппировывать двигатели с одного способа соединения на другой; 3) переключать секции пускового реостата; 4) регулировать скорость посредством ослабления поля; 5) осуществлять электрическое торможение; 6) реверсировать двигатели; 7) отключать неисправные двигатели с сохранением работоспособности схемы на оставшихся исправных двигателях; 8) защищать двигатели от ненормальных режимов работы.
Система непосредственного управления является наиболее простой, но не обеспечивает высоких динамических показателей — пусковые ускорения и тормозные замедления подвижного состава не превышают 1 м/сек2 при малопозиционных контроллерах (10—12 позиций) и 1,5 м/сек2 — при многопозиционных контроллерах (20—22 позиции).
Увеличение ускорений и замедлений, а следовательно, и ходовой скорости подвижного состава может достигаться: путем увеличения числа пусковых и тормозных позиций, применением автоматического управления и усилением тормозных средств поезда. Современный подвижной состав обладает высокой установленной удельной мощностью двигателей, до 1—1,5 кВт/кн. Автоматическая система, применяемая на вагонах с системой косвенного управления, обеспечивает плавное трогание с места и стабильность ускорения при высоком его значении — до 2—2,5 м/сек2.
В настоящее время на двухосных и четырехосных вагонах всех типов, кроме вагонов РВЗ, Т2 и Т3, применяется система непосредственного управления. На троллейбусах применяется система косвенного управления — неавтоматическая (троллейбусы МТБ) и автоматическая (троллейбус ТР-9).
Электрическую схему экипажа можно подразделить на основные элементы, исполняющие различные функции в работе подвижного состава и называемые условно цепями: 1) силовая цепь, по которой протекает ток тяговых двигателей; 2) цепи управления, предназначенные для приведения в действие аппаратуры силовой и других цепей;
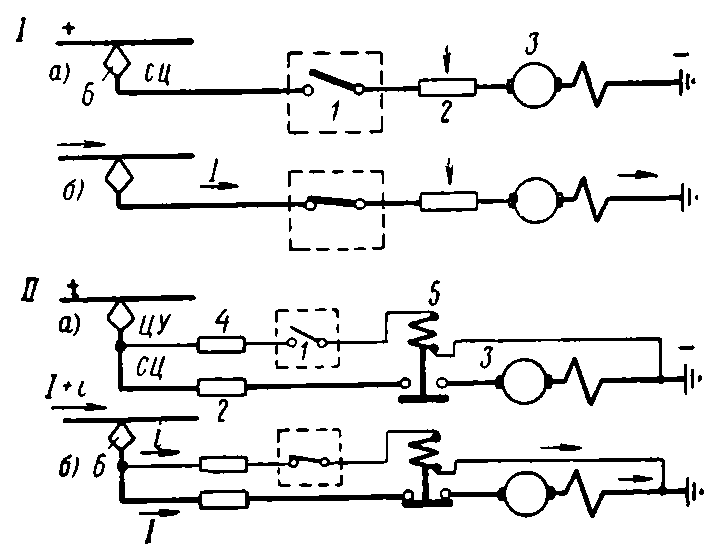
Рис. 17. Простейшие принципиальные схемы управления
I — непосредственного: а — цепь выключена; б — цепь включена; II — косвенного: а — цепь включена; б — цепь выключена; СЦ — силовая цепь; ЦУ — цепь управления; 1 — контроллер управления; 2 — пусковой реостат; 3 — тяговой двигатель; 4 — добавочное сопротивление или потенциометр; 5 — электромагнитный контактор; 6 — пантограф
3) цепи обслуживания — освещения, сигнализации и т. п. и цепи вспомогательных электрических машин — электродвигателей компрессора и вентилятора и низковольтные цепи; 4) цепь параллельного возбуждения (при применении двигателей смешанного возбуждения).
На общее построение схемы силовой цепи и на степень ее сложности оказывают влияние: система управления поездом, система возбуждения и номинальное напряжение тяговых двигателей, способ перехода с одного соединения двигателей на другое, применение ослабленного поля, применение электрического торможения, способ соединения и количество секций пусковых и тормозных сопротивлений, тип электрической аппаратуры. В зависимости от числа двигателей различают схемы с одним, двумя и четырьмя двигателями, а в зависимости от числа перегруппировок — схемы с постоянным соединением двигателей (одноступенчатые) и с двумя способами соединения двигателей (двухступенчатые). По способу возбуждения тяговых двигателей различают схемы с двигателями последовательного возбуждения и с двигателями смешанного возбуждения. В схемах с четырьмя двигателями номинальное напряжение значительно влияет на сложность построения схемы, а именно: применение двигателей на 275 в дает возможность упростить схему силовой цепи при двухступенчатой перегруппировке и построить ее по принципу схемы с двумя двигателями. При заданной системе управления применение перегруппировки двигателей и электрического торможения в наибольшей степени усложняет построение схемы. Кроме того, при непосредственном управлении усложняется устройство контроллера, а при косвенном, помимо этого, требуется большее количество контакторов.
На электрических схемах главный, кулачковый и реверсивный валы контроллеров даются в развернутом виде, а их позиции показываются вертикальными пунктирными линиями. Пальцы реверсивного вала изображаются вертикальным рядом в виде кружков, обозначенных соответствующими буквами и цифрами, а сегменты — вертикальными прямоугольниками. Впадины кулачковых шайб кулачкового вала изображаются в виде горизонтальных прямоугольников или сплошных кружков. Подвижные и неподвижные контакты обозначаются вертикальными черточками, на неподвижном контакте показывается дугогасительная катушка. При разборе схем следует иметь в виду
следующее: контакты кулачкового контактора замкнуты, если вертикальная линия пересекает горизонтальный прямоугольник или на этой линии расположен сплошной кружок развертки кулачкового вала. Одинаковые цифры и буквы на реверсивных пальцах и неподвижных контактах показывают, что они соединены между собой постоянно внутри контроллера. Подвижные контакты контакторов обозначаются цифрами и буквами.
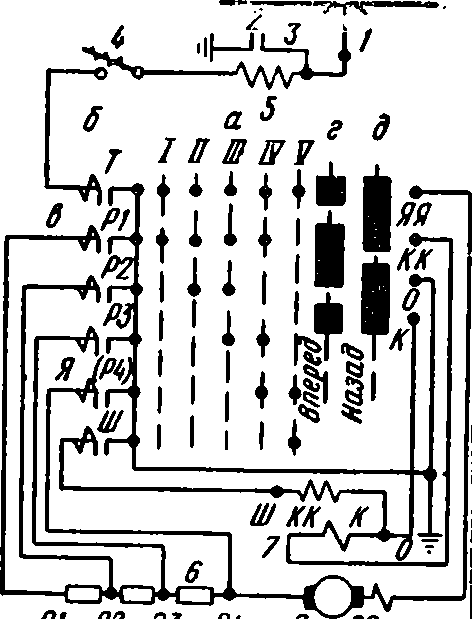
Рис. 18. Принципиальная схема системы непосредственного управления

Рис. 19. Схемы прохождения тока (по схеме управления рис. 18) позиции: I — III — реостатные; IV — ходовая (полное поле); V — ходовая (ослабленное поле): 1 — токоприемник; 2 — индукционная катушка; 3 — роговой разрядник; 4 — автоматический выключатель; 5 — кулачковый контроллер: а — кулачковый вал; б — подвижный и неподвижный контакты контакторного элемента; в — дугогасительная катушка; г — реверсивный барабан; д — пальцы реверсивного барабана); 6 — пусковое сопротивление; 7 — тяговый двигатель
Зажимы тяговых двигателей и электрической аппаратуры, соответствующие пальцам и неподвижным контактам, обозначаются одноименными буквами.
Рассмотрим простейшие принципиальные схемы управления. На рис. 18 показана схема непосредственного управления одним двигателем. Силовая цепь при помощи токоприемника включается под напряжение контактного провода и через ходовые части вагона соединяется с рельсами (рабочее заземление), которые используют в качестве обратного провода. В силовой цепи контроллеры выполняют простейшие функции переключателя для пуска, ослабления поля и реверсирования тяговых двигателей. Схемы прохождения тока показаны на рис. 19 для всех позиций при движении «Вперед» и для позиции IV при движении «Назад». Для изменения направления движения поезда необходимо изменить направление вращения тяговых двигателей, которое зависит от направления магнитного потока полюсов и тока в обмотке якоря. Следовательно, для изменения направления вращения двигателя достаточно изменить направление тока либо в якоре, либо в катушках главных полюсов. При системе непосредственного управления это достигается с помощью реверсивного барабана контроллера, а в схемах косвенного управления — при помощи специального реверсора.
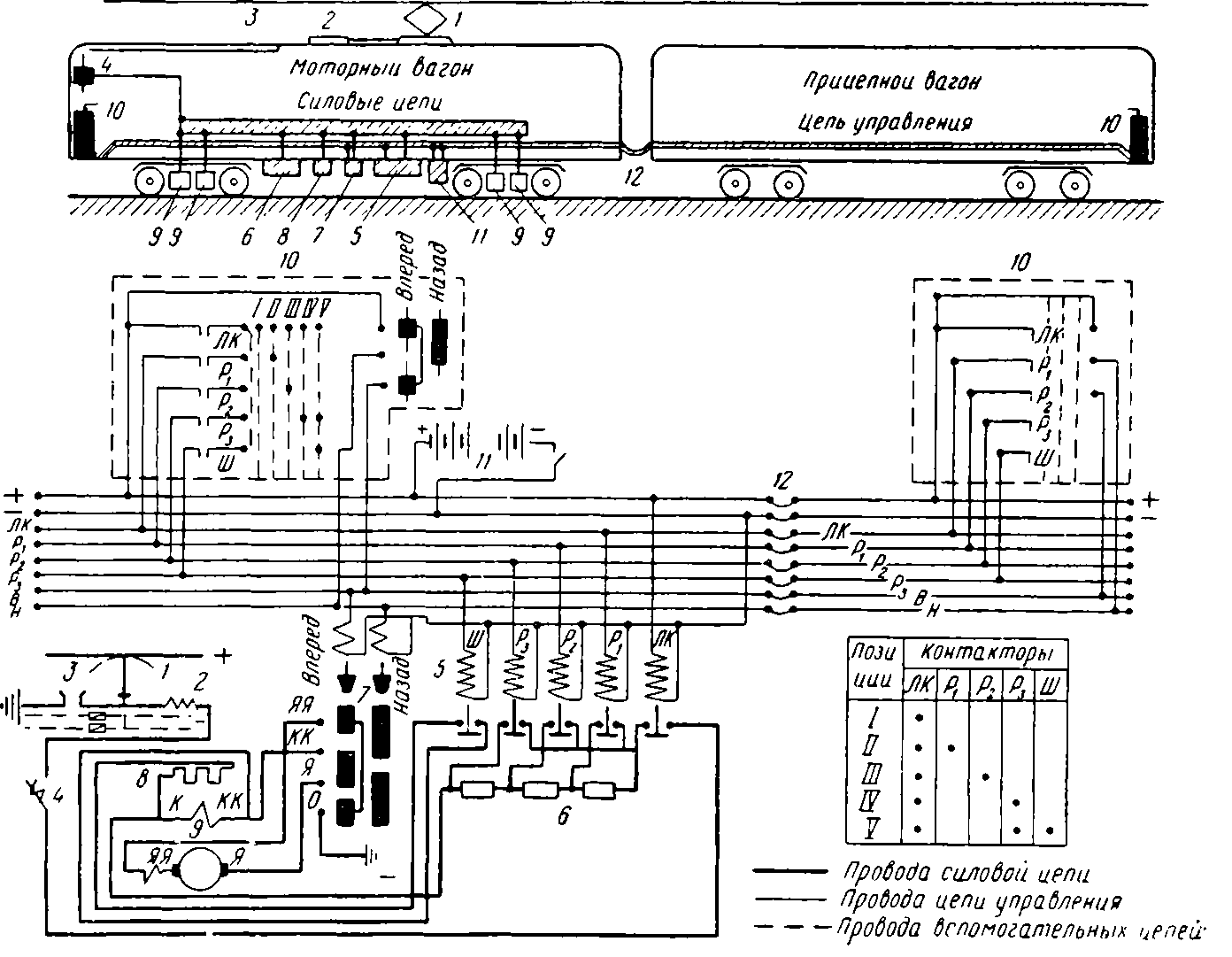
Рис. 20. Принципиальная схема системы косвенного управления:
1 — токоприемник; 2 — роговой разрядник; 3 — индукционная катушка; 4 — автоматический выключатель; 5 — электромагнитные контакторы; 6 — пусковой реостат; 7 — реверсор; 8 — шунт; 9 — тяговый двигатель; 10 — контроллер управления; 11 — аккумуляторная батарея; 12 — междувагонное соединение
На рис. 20 приведена простейшая принципиальная схема системы косвенного неавтоматического управления одним тяговым двигателем. В схеме предусмотрены только наиболее простые функции: пуск двигателя, регулирование его скорости посредством ослабления поля и реверсирование. Силовая цепь моторного вагона состоит из токоприемника, аппаратуры защиты (автоматический выключатель и роговой разрядник), подвижных и неподвижных контактов электромагнитных контакторов, пусковых сопротивлений, шунта, реверсора и тяговых электродвигателей. Все переключения в силовой цепи выполняются электромагнитными контакторами. Цепь управления состоит из контроллера управления, катушек электромагнитных контакторов и реверсора. Для питания цепи управления служит аккумуляторная батарея. На прицепных вагонах имеются только контроллеры управления.
Контроллер управления осуществляет включение и выключение электромагнитных контакторов. При прохождении тока по катушке сердечник контактора притягивает якорь, который замыкает контакты силовой цепи, осуществляя этим необходимые соединения тяговых двигателей и реостатов в силовой цепи. Система позволяет просто осуществлять параллельную работу нескольких моторных вагонов, управляемых от одного контроллера. Провода цепи управления проложены во всех вагонах поезда. Ток управления через контроллер головного вагона проходит по всей цепи управления и посредством контакторов воздействует на силовую цепь каждого моторного вагона. Так как ток управления обычно небольшой — порядка 5—10 а, то укладка проводов через все вагоны поезда и выполнение междувагонных соединений не представляют затруднений, особенно при низком напряжении в цепи управления (50—110 в). Все контроллеры поезда присоединяются к проводам цепи управления, которые соединены параллельно, вследствие чего управление контакторами и реверсорами моторных вагонов может происходить из любого пункта поезда, где установлен контроллер.
Поезда формируются из отдельных групп вагонов, так называемых электровагонных секций. Секция состоит из некоторого числа вагонов моторных (М) и прицепных (П) или только моторных. Например, на рис. 20 представлена секция, состоящая из двух вагонов (М+ П). Секции могут состоять также из двух моторных вагонов (М + М). Поезда формируются из одной, двух или трех секций. В этом случае система косвенного управления носит название системы единого управления.