Лабораторная работа №7
МОДЕЛИРОВАНИЕ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ В СИСТЕМЕ АРС
Цель работы. Изучение принципа действия и программных решений автоматизации расчета интервальных скоростей и скоростей роспуска состава с горки в системах автоматического регулирования скорости скатывающихся с горки отцепов (АРС).
Краткие сведения из теории
Автоматизированные системы управления горкой должны в общем случае решать три основные задачи по автоматизации управления:
- Скорость надвига и роспуска состава с горки.
- Маршруты скатывающихся с горки отцепов.
- Скорость скатывающихся с горки отцепов.
Наиболее важные алгоритмические, схемотехнические, программные аспекты обеспечения безопасности функционирования горочных устройств могут быть успешно решены при модульном построении структур автоматизированных систем управления. Это означает, что система компонуется из локальных функционально законченных блоков, которые в состоянии работать как самостоятельно и независимо один от другого, так и в едином взаимосвязанном комплексе.
Модульная компоновка, кроме повышения живучести, позволяет достичь любого уровня автоматизации, исходя из мощности сортировочных горок, их технологических особенностей и экономических соображений. Еще одно важное достоинство модульной организации - возможность поэтапного внедрения модулей, благодаря чему экономический эффект может быть получен сразу после установки на горке того или иного блока или их группы.
Регулирование скорости скатывания отцепов с горки и, соответственно, интервалов между ними осуществляется на автоматизированных горках при помощи вагонных замедлителей, располагаемых на трех тормозных позициях (ТП): верхней (I), средней (II), парковой (III).
При управлении скоростью скатывающихся с горки отцепов главенствующую роль играет обеспечение минимально необходимых интервалов между скатывающимися отцепами, что осуществляется путем расчета в реальном времени и реализации интервальных скоростей выхода отцепов из I и II ТП, а также скорости роспуска состава. При этом учитываются ограничения, определяемые безопасностью функционирования горочных устройств (БФГУ) [4].
К условиям безопасности относятся: непревышение допустимой скорости входа отцепа в следующую ТП; достаточность тормозной мощности следующей ТП; непревышение скоростей входа на рельсовые цепи стрелок; условие достаточности временного интервала для разделения смежных отцепов на стрелках.
В процессе моделирования движения отцепа следует использовать следующие основные выражения:
- Скорость в конце участка Vк при известной начальной скорости Кн


Наилучшим является вариант равенства данной величины нулю - роспуск осуществляется при одной скорости и переключений скорости для каждого отцепа нет. Меньшее число переключений режимов работы горочного локомотива влечет за собой меньшую изнашиваемость деталей и меньший расход топлива. Кроме этого, упрощается работа машиниста локомотива.
- Глубина переключений скорости
где ∆Vр,i - перепад скорости в момент переключения. Наилучшее значение Гп есть равное нулю, т.е. изменение скорости не происходит, а роспуск производится с постоянной скоростью.
2 Оборудование и приборы
Персональный компьютер с установленным программным комплексом автоматизированного расчета скоростей.
3 Порядок выполнения работы
- Изучить работу программного комплекса автоматизированного расчета скоростей. Для этого необходимо запустить основной модуль:
Затем необходимо загрузить в транслятор заданий данные о расформировываемом составе (кнопка «Изменить параметры отцепов»). Данные о 10 отцепах в составе выбирает студент по согласованию с преподавателем:

Загрузив данные о составе (кнопка «Open»), необходимо вычислить удельное сопротивление движению для каждого отцепа (кнопка «Вычислить сопротивление», «Сохранить изменения»).
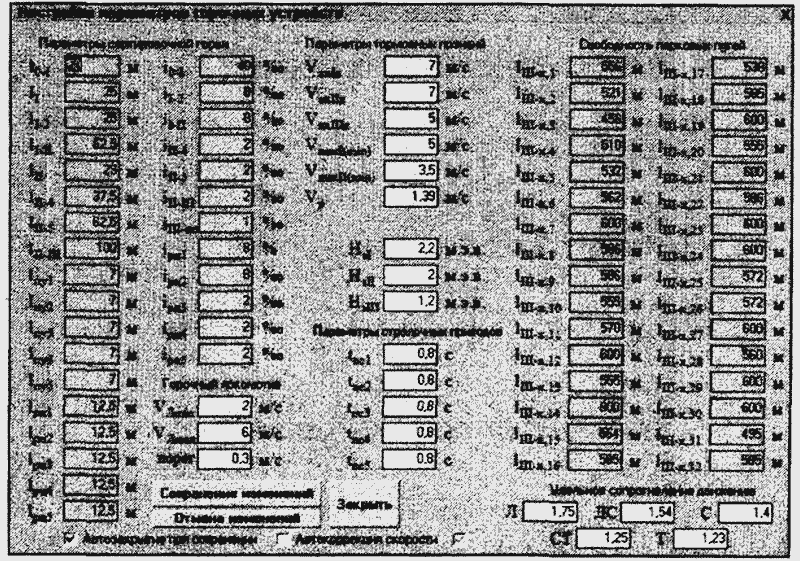
Далее следует ввести параметры горочных устройств (скорости, мощности замедлителей и т.д. - кнопка «Изменить параметры горочных устройств»):
После сохранения изменений приступают к непосредственному расчету (кнопка «Начать расчет»).
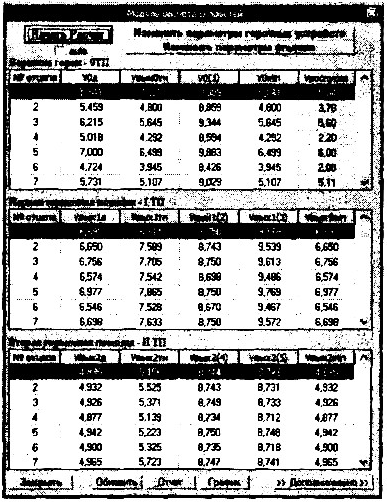
После выполненных вычислений появляется возможность оценить скорость роспуска состава, скорости на различных участках горки и время движения по участкам (кнопки «График» и «Отчет»),
Для визуального наблюдения за процессом расформирования необходимо открыть окно «Дополнительно», где нажать на кнопку «Видео»:


Для ручного изменения скорости надвига состава необходимо нажать кнопку «Изменение скорости»:
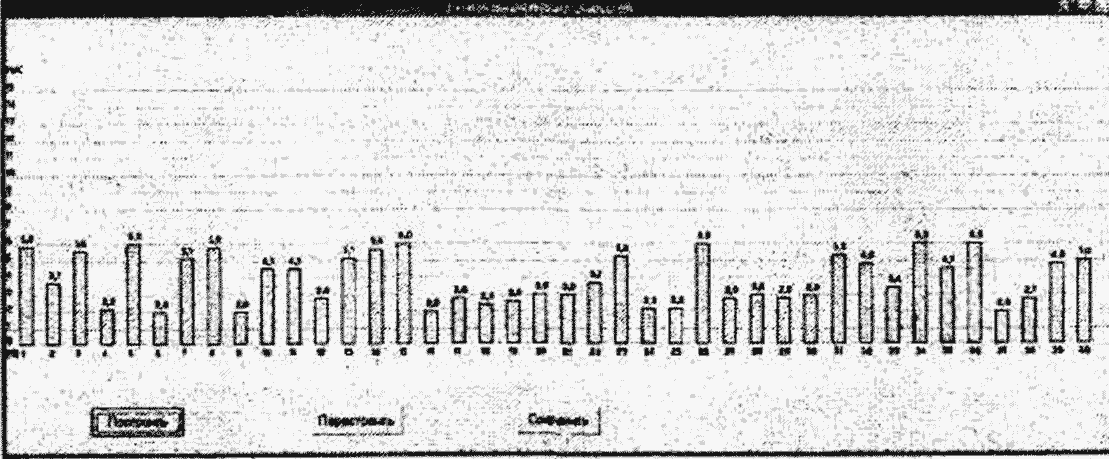
Для изменения скорости достаточно провести «мышкой» график роспуска и нажать кнопку «Перестроить». В итоге на экране будет представлен новый график:
Для подтверждения изменений необходимо нажать кнопку «Сохранить». После чего можно вновь визуализировать процесс роспуска.
- В трансляторе заданий создать новый состав из 10 отцепов.
- Установить свободность парковых путей по 600 м каждый, выбрать режим корректировки скорости.
- Произвести моделирование для нового состава-
- Визуализировать полученные данные.
- Вручную изменить скорость роспуска состава с заведомым нарушением условий безопасности. В модуле визуализации оценить возможность столкновения отцепов при несоблюдении условий безопасности.
- Оценить частоту и глубину переключений при различных видах корректировки (есть, нет, max).
Оформление отчета
Условия безопасности при расформировании составов на горке; таблицы значений скоростей и временных интервалов на различных участках горки; график роспуска с оптимизацией и без (информация может быть получена в модуле генерации отчета); ответы на контрольные вопросы.
Контрольные вопросы
- Условия безопасности при расчете скорости роспуска состава с горки.
- Функции тормозных позиций в системах АРС,
- Понятие «дифа».
- Зависимость скорости роспуска от интервала на стрелке разделения.
СПИСОК ЛИТЕРАТУРЫ
- Правила и нормы проектирования сортировочных устройств на железных дорогах Союза СССР. ВСИ 207-89 /МПС СССР. - М.: Транспорт, 1992. - 105 с.
- Модин Н.К. Механизация и автоматизация станционных процессов. - М.: Транспорт, 1985.-224 с.
- Станционные системы автоматики и телемеханики: Учеб, для вузов ж.-д. трансп. / В. В. Сапожников, Б.Н. Елкин. И.М. Кокурин и др. Под ред. В.В. Сапожникова. - М.: Транспорт, 1997. - 432с.
- Модин Н.К. Безопасность функционирования горочных устройств. - М.: Транспорт, 1994. - 173 с.
- Модин Н.К, Щербаков ЕВ. Техническое обслуживание горочных устройств. - М.: Транспорт, 1989. -167 с.
- Модин Н.К, Аксютик И.И. Безопасность труда при техническом обслуживании и ремонте горочных устройств: Учеб. пособие. - Гомель: БелГУТ, 1999. - 38 с.
- Технология технического обслуживания горочного вагонного замедлителя типа НК-114. Руководящий документ Республики Беларусь РД РБ 09150 19.075-2003. - Минск: Белорусская железная дорога, 2003. - 33 с.
Учебное издание
МОДИН Николай Константинович
ЗОБОВ Сергей Михайлович
Механизация и автоматизация сортировочных горок
Лабораторный практикум по дисциплине «Автоматизация технологических процессов на сортировочной станции»