Связь между функциональными узлами и блоками скоростемера ЗСЛ-5П поясняется рис. 21. Принцип работы каждого узла представлен на соответствующих структурных схемах с описанием их взаимодействия.
Датчик пройденного пути и скорости магнитоиндукционной системы установлен на буксе колеса. При движении локомотива он выдает две последовательности электрических импульсов, число которых пропорционально пройденному пути, а частота — скорости движения.
При вращении зубчатого колеса 1 с угловой скоростью ω (рис. 22) изменяется магнитное сопротивление в зазорах, что приводит к появлению в катушках электрических сигналов, по форме близких к синусоидальным. Наличие двух катушек 3 и 5 и дифференциальная конструкция магнитопровода 2 (включающего в себя постоянный магнит 4) позволяют получить две последовательности импульсов (в зависимости от направления вращения зубчатого колеса 1) с амплитудой не менее 120 мВ при частоте вращения зубчатого колеса около 10 об/мин, сдвинутых относительно друг друга по фазе не менее 45°.

Рис. 21. Структурная схема скоростемера ЗСЛ-5П
Число зубьев колеса 1 зависит от типа и размера диаметра колеса локомотива и выбирается по специальной таблице, при этом частота импульсов датчика находится в зависимости от износа диаметра колеса и скорости локомотива.

Рис. 22, Схема датчика пройденного пути и скорости:
1- зубчатое колесо; 2- магнитопровод, 3, 5- катушки; 4 - постоянный магнит
Узел формирования импульсов служит для усиления импульсов, поступающих с датчика пройденного пути и скорости, с целью обеспечения нормальной работы последующих узлов и блоков скоростемера.
Усилители - формирователи Ф1 и Ф2 (рис. 23) преобразуют положительную полуволну сигнала в отрицательные импульсы прямоугольной формы.
С выхода узла формирования импульсов сигналы поступают на основные блоки скоростемера: измерения, коррекции, регистрации и сигнализации скорости; регистрации пройденного пути, а также на узел регистрации направления движения.
Узел регистрации направления движения построен на принципе выявления опережения (фазы) одной последовательности импульсов относительно другой. Эта необходимая информация определенным образом отображается на диаграммной ленте.
Узел регистрации направления движения представляет собой логическое устройство, выполненное на элементах «Юпитер». Сформированные сигналы А и Б поступают на логическое устройство ЛУ. Триггер логического устройства срабатывает только при определенной фазе последовательностей входных импульсов. Сигнал с выхода ЛУ поступает на выходное устройство ВУ, управляющее работой реле типа РЭС-22. Через контакты этого реле включается электромагнит, регистрирующий направление движения. Якорь электромагнита через поворотный механизм связан с самопишущим устройством. Все элементы, за исключением реле и электромагнита, установлены в блоке управления. Реле и электромагнит установлены в блоке регистрации.

Рис. 23. Схема блока управления (узла формирования и регистрации направления движения)

Рис. 24. Структурная схема блока регистрации пройденного пути
Блок регистрации пройденного пути (рис. 24) при помощи делителей частоты и шагового двигателя осуществляет подсчет числа импульсов, вырабатываемых датчиком пройденного пути и скорости, и производит отображение информации путем прокола диаграммной ленты через каждый километр пройденного пути. Кроме того, в этом блоке имеется пятиразрядный счетчик пройденного пути.
За расчетное число импульсов на 1 км пройденного пути принято 7830 импульсов.
Для согласования числа импульсов датчика с масштабом регистрации и моментом привода лентопротяжного механизма общее передаточное отношение блока разбито на две части.
Из них путем деления числа импульсов электронным делителем на триггерах реализуется i = 8, а механическим образом 408. С валом шагового двигателя соединен редуктор с 408. Подобное конструктивное решение вызвано необходимостью создания достаточно большого момента на ведущем валу лентопротяжного устройства.
Узел управления нереверсивным шаговым двигателем представляет собой логическое устройство, которое вырабатывает определенную последовательность сдвинутых во времени импульсов для управления работой шагового двигателя ШД1.
Выходной вал редуктора соединен с ведущим валом лентопротяжного механизма, который при помощи игл, расположенных по средней линии и на расстоянии 5 мм от краев, зацепляет, прокалывает и протягивает диаграммную ленту. По проколам на ленте производится отсчет пройденного пути (цена деления между проколами 1 км). Промежуточный вал редуктора вращает вал пятиразрядного суммирующего счетчика пройденного пути.
Расчет коррекции пути можно производить по числу проколов диаграммной ленты и имеющимся 10-мм поперечным линиям на ленте. В этом случае находят коэффициент пути К и и выполняют точную расшифровку ленты.

Рис. 25. Функциональная схема скоростного блока
Скоростной блок (рис. 25) выполняет функции измерения, регистрации, коррекции и сигнализации скорости движения локомотива. К нему предъявляются жесткие требования: высокой надежности, высокой точности в широком диапазоне температур и вибраций, необходимого быстродействия, возможности дистанционной передачи показаний и наличия достаточно большого момента Для нормальной работы механизма регистрации скорости.
Скоростной блок представляет собой частотно-импульсную замкнутую следящую систему, в которой частота одной последовательности импульсов датчика скорости (fR) преобразуется в пропорциональное ей механическое перемещение регистратора скорости и в угол поворота потенциометра, выдающего ток цепи обратной связи, преобразуемый преобразователем тока в частоту, пропорциональную току в цели обратной связи.
Отображение скорости движения осуществляется измерительным прибором магнитоэлектрической системы, включенного в цепь обратной связи преобразователя.
Частота датчика подается на один из входов узла выделения разности частот, а его выходы подключены к входам логического устройства управления шаговым двигателем ШД2. Вал ШД2 через редуктор соединен с потенциометром R, выходной ток которого, пропорциональный скорости движения v, отображается индикатором магнитоэлектрической системы и поступает на преобразователь тока в частоту, которая через делитель частоты снова подается на вход узла выделения разности частот. Таким образом, в блоке осуществляется отрицательная обратная связь по частоте, что дает возможность получить достаточные стабильность и точность измерения скорости движения.
В исходном состоянии (при v — 0) от датчика на вход узла выделения разности частот импульсы не поступают.
Положения механизма регистрации (писца) и движка потенциометра соответствуют нулевому значению скорости, поэтому отсутствует ток в цепи обратной связи, следовательно, частота преобразователя тока в частоту будет равна нулю. Стрелка прибора в этом случае будет находиться в нулевом положении.
При трогании локомотива датчик скорости будет вырабатывать импульсы, что приведет к запуску логического устройства управления шаговым двигателем, ШД2 при этом начнет разворачиваться (что соответствует разгону), приводя в движение механизм регистрации и движок потенциометра Л В цепи обратной связи возникнет ток, который преобразуется в частоту импульсов преобразователя fпр. Процесс перемещения механизма регистрации и движка потенциометра будет происходить до тех пор, пока частоты датчика fд и преобразователя fp не сравняются. Разность частот при этом fd—fпр будет стремиться к нулю. Писец будет занимать определенное устойчивое среднее положение.
При идеальном равномерном движении локомотива частоты fд и fnp будут равны и на шаговый двигатель импульсы управления поступать не будут. Писец и движок потенциометра будут находиться в этом случае в фиксированном положении.
При снижении скорости локомотива частота следования импульсов датчика уменьшится, следовательно, разность частот fпp—fд запустит логическое устройство управления шаговым двигателем и ШД2 начнет разворачиваться обратно, приводя в движение механизм регистрации и движок потенциометра. В этом случае ток в цепи обратной связи уменьшится, а следовательно, уменьшится частота преобразователя fпр. Процесс будет происходить до тех пор, пока частоты fд ,и fпр не станут равными.
Работа узла выделения разности частот датчика и преобразователя синхронизируется от источника эталонного времени с частотой 1000 Гц. Этот узел построен на бесконтактных логических элементах «Юпитер».
Реверсивное логическое устройство управления шаговым двигателем вырабатывает прямую (fд—fПР) и обратную (fпр— fд) последовательности частот, сдвинутых во времени по четырем фазам, для обеспечения нормальной работы шагового двигателя.
На потенциометр с блока питания R поступает стабилизированное напряжение U и при изменении угла отклонения потенциометра в цепи обратной связи изменяется ток.
Преобразователь тока в частоту импульсов можно корректировать от дополнительного источника напряжения. Такую коррекцию осуществляют при изменении диаметра колеса. Напряжение коррекции при этом выбирают в зависимости от износа обода колеса по диаметру (рис. 26). Преобразователь построен по компенсационному принципу заряда и разряда конденсаторов и обеспечивает точность преобразования до 1% в широком интервале температур.
Узел сигнализации контрольных скоростей построен по принципу сравнения направления токов (рис. 27).
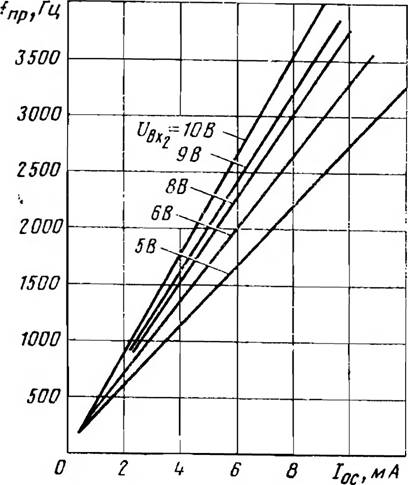
Рис. 26. Зависимости частоты преобразователя от тока обратной связи при различных напряжениях коррекции
При небольшом увеличении тока Iос по сравнению с опорным током Iоп на выходе потенциометра R ток I становится положительным, что приводит к срабатыванию порогового элемента F, который изменяет свое состояние. Затем импульс усиливается усилителем У и подается на обмотку реле Р типа РЭС-22. Оно срабатывает и своими контактами замыкает цепь сигнализации скоростей.
Изменение порога срабатывания в каждом канале осуществляется движком потенциометра R. В скоростемере шесть контрольных скоростей.
Блок индикации и регистрации суточного времени (регистрации времени движения и стоянок) (рис. 28) представляет собой цифровое устройство с делителями частоты и выходными шаговыми двигателями. Задатчиком цифрового устройства является кварцевый генератор (источник эталонного времени). Последний является также тактирующим устройством для скоростного блока.

Рис. 27. Структурная схема узла сигнализации контрольных скоростей
Кварцевый генератор вырабатывает импульсы частотой 4000 Гц. Электронный делитель частоты осуществляет деление частоты на 4 и 250. Суммарное деление частоты при этом равно 1000. Частота импульсов 1000 Гц необходима для синхронизации узла выделения разности частот fд и fon в скоростном блоке.

Рис. 29. Функциональная схема блока питания скоростемера
С выхода делителя, частоты сигнал с частотой 4 Гц поступает на схему управления шаговыми двигателями (ШД3, ШД4 и ШД5). ШД3 через редуктор приводит в действие механизм записи времени на диаграммной ленте и вторичные часы. ШД4 и ШД3 фиксируют время движения и стоянок соответственно.
Блок питания (рис. 29) вырабатывает все необходимые напряжения с определенными амплитудами и коэффициентами пульсаций для питания логических элементов, усилителей мощности, преобразователей и исполнительных устройств скоростемера. Он построен по принципу двойного преобразования: постоянное напряжение внутренней сети локомотива поступает через цепи защиты от превышения напряжения сети на маломощный преобразователь напряжения, в котором происходит преобразование постоянного напряжения в переменное с частотой около 800 Гц. Переменное напряжение поступает через усилитель мощности на первичную обмотку трансформатора. На выходе трансформатора имеется шесть обмоток, позволяющих получить различное по амплитуде переменное напряжение.
С выходных обмоток трансформатора переменное напряжение поступает на выпрямители, выполненные по мостовой схеме. С выходов выпрямителей пульсирующее напряжение поступает на соответствующие сглаживающие фильтры для уменьшения пульсации выходных напряжений. Для получения стабильных постоянных напряжений некоторые источники имеют стабилизаторы напряжения.
Подобное построение блока питания позволяет получить комбинацию различных постоянных напряжений как по амплитуде, так и по полярности относительно общего провода (корпуса) и, кроме того, осуществить гальваническую развязку с сетью локомотива и предотвратить прохождение помех со стороны первичной сети.
Узел регистрации давления в тормозной магистрали и режима торможения представляет собой преобразователь давления в пропорциональное перемещение самопишущего механизма. Внутри сильфона 1 (рис. 30) установлена пружина 2, предназначенная для противодействия измеряемому давлению.

Рис. 30. Устройство для регистрации давления в тормозной магистрали
Пружину регулируют винтовой втулкой 3. После регулировки втулку контрят гайкой. При максимальном давлении 0,8 МПа (8 кгс/см2) рейка перемещается на 10 мм, что соответствует перемещению устройства записи по диаграммной ленте на 50 мм.
Блок сигнализации и регистрации сигналов локомотивного светофора и других внешних сигналов включает в себя преобразователи электрических сигналов — электромагниты, якоря которых связаны с самопишущим устройством. Для регистрации внешних сигналов установлены семь электромагнитов, которые могут длительное время работать во включенном режиме.
При поступлении сигнала на какой-либо из электромагнитов якорь притягивается к сердечнику. С якорем через кулачок сочленен механизм записи, который смещается на (2±0,5) мм.