Тяговые характеристики электроподвижного состава
Характеристики тяговых электродвигателей постоянного тока электроподвижного состава
На электровозах и электропоездах постоянного и переменно-постоянного тока применяют тяговые электродвигатели постоянного тока. Форма тяговых характеристик электроподвижного состава (э.п.с.), в основном, определяется электромеханическими характеристиками тяговых электродвигателей (ТЭД), приведенных к валу двигателя, а именно: nд =f(Iд) — частоты вращения якоря ТЭД от его тока при заданном напряжении питания от контактной сети UKC; Мд =f(I ) — вращающего момента на якоре ТЭД от тока; ηд = f(Iд) — к.п.д. тягового электродвигателя от тока якоря. Электромеханические характеристики тяговых электродвигателей э.п.с. получают при стендовых испытаниях на заводе-изготовителе.
При тяговых расчетах электромеханические характеристики тягового электродвигателя обычно приводят к ободу колес колесной пары электровозов и электропоездов и получают электромеханические характеристики колесно-моторного блока [5]:
V=f(Iд) — скорости движения колесной пары э.п.с. от тока якоря ТЭД;
F = f(Iд) — касательной силы тяги колесной пары э.п.с. от тока якоря ТЭД; ηэ=f(Iд)- К.П.Д. колесно-моторного блока э.п.с. от тока якоря ТЭД.
При пересчете электромеханических характеристик тяговых электродвигателей на характеристики колесно-моторных блоков используют следующие формулы:
- скорость движения колесной пары э.п.с., км/ч:
![]() (2.34)
(2.34)
где С — постоянный коэффициент для данной серии локомотива:
![]()
где С8 — конструктивная постоянная тягового электродвигателя; μ — передаточное число тяговых редукторов колесной пары; DK — диаметр колес колесной пары, м;
- касательная сила тяги на ободе колес колесной пары, Н:
![]() (2.35)
(2.35)
где ΔF — потери силы тяги, вызванные магнитными и механическими потерями в колесно-моторном блоке, Н:
![]()
где ΔΡΜaгн — потери мощности в магнитной системе ТЭД, кВт; ∆Рмех — механические потери мощности в якорных подшипниках и щеточном аппарате ТЭД, кВт; ∆Р — потери мощности в тяговых редукторах колесной пары и моторно-осевых подшипниках ТЭД, кВт; V — скорость движения, км/ч;
- коэффициент полезного действия колесно-моторного блока э.п.с.
![]()
где Δρπ — потери в тяговых редукторах и моторно-осевых подшипниках в процентах от подведенной мощности, %. Величина Δρπ определяется по графикам Δρπ = f(Р1) [12].
Необходимо отметить, что форма электромеханических характеристик тяговых электродвигателей и колесно-моторных блоков э.п.с. напрямую зависит от принятой системы возбуждения двигателей.
На рис. 37 представлены схемы основных систем возбуждения тяговых электродвигателей э.п.с.: последовательного (рис. 37, а), параллельного (рис. 37, б), смешанного возбуждения при согласном (рис. 37, в) и встречном (рис. 37, г) включении последовательной и параллельной обмоток и независимого возбуждения (рис. 37, б). Расчетные тяговые характеристики электровозов стяговыми электродвигателями, имеющими вышеперечисленные системы возбуждения, приведены на рис. 38. Из кривых FK =f(V), представленных на рис. 38, следует, что тяговая характеристика электровоза с двигателями последовательного возбуждения (кривая 1) наиболее приближена к идеальной тяговой характеристике локомотива с электрическим приводом колесных пар (кривая 4) и позволяет наиболее полно использовать мощность тягового электродвигателя в эксплуатации. Тем не менее в зоне малых скоростей движения электровоза, когда тяговые электродвигатели работают при больших токах якоря /д, наблюдается увеличение жесткости характеристик локомотива. Жесткость характеристик электродвигателей и электровоза в целом определяется темпом изменения силы тяги FK от скорости V. Тяговые характеристики локомотивов называют жесткими при резком изменении функции FK=f(V) (например, кривая 2 на рис. 38) и мягкими при плавном изменении кривой FK=f(V).
В свою очередь, тяговые характеристики электровозов с электродвигателями параллельного, смешанного и независимого возбуждения имеют более высокую степень жесткости, чем при последовательном возбуждении.
Вышеперечисленные системы возбуждения тяговых электродвигателей обладают целым рядом достоинств и недостатков и нашли практическое применение на различных сериях электровозов.
Так, для электровозов постоянного тока с контакторно-реостатным управлением признано целесообразным [5] применение тяговых электродвигателей с системами последовательного или смешанного возбуждения с мягкими тяговыми характеристиками.
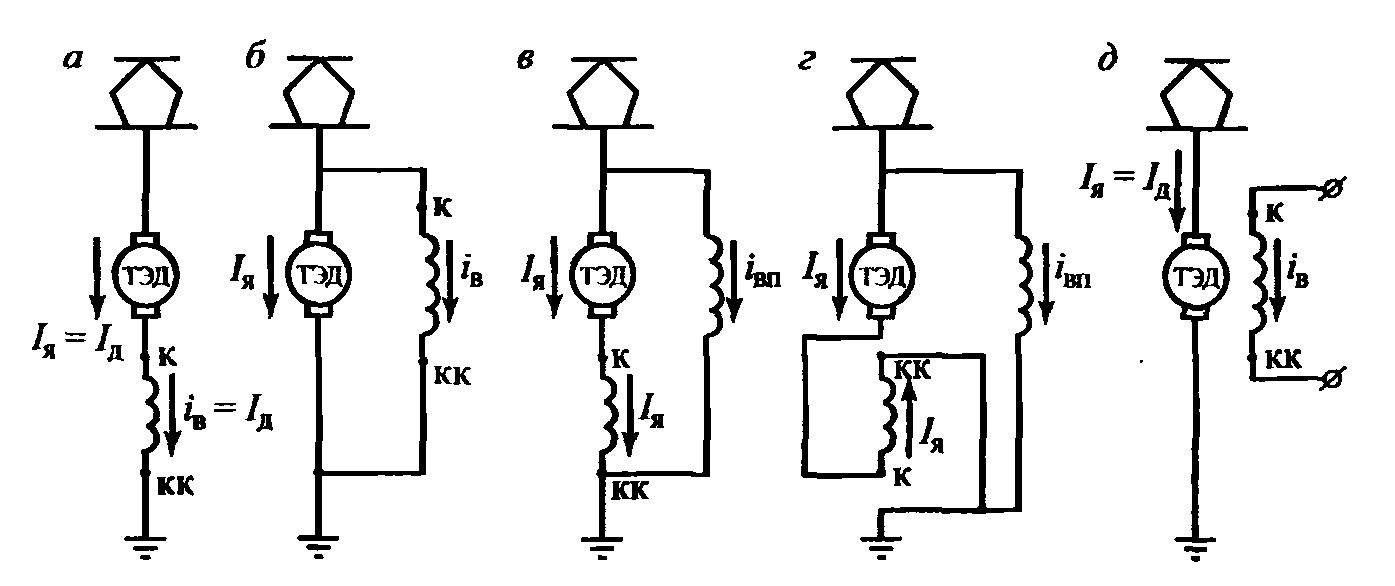
Рис. 37. Схемы систем возбуждения тяговых электродвигателей электроподвижного состава: а — последовательного; б — параллельного; в — смешанного при согласном включении обмоток; г — смешанного при встречном включении обмоток; д — независимого возбуждения

Рис. 38. Расчетные тяговые характеристики электровозов с электродвигателями, имеющими разные системы возбуждения: 1 — при последовательном; 2 — при параллельном и независимом; 3 — при смешанном; 4 — идеальная характеристика
На электровозах переменно-постоянного тока и э.п.с. постоянного тока с импульсным регулированием предпочтительнее оказалось использование тяговых двигателей с независимым возбуждением и
жесткими характеристиками. Такие характеристики тяговых электродвигателей позволяют уменьшить интенсивность процессов боксования локомотива и, соответственно, увеличить критические веса водимых поездов. Широкое применение силовых полупроводников на э.п.с. позволяет несколько сгладить серьезные недостатки независимого возбуждения ТЭД — сильный разброс токов нагрузки между параллельно работающими ТЭД локомотива и чувствительность к колебаниям напряжения в контактной сети.
Сравнительные испытания электровозов ВЛ80р с последовательным возбуждением тяговых электродвигателей и ВЛ80Р с независимым возбуждением с поездами, проведенные ВНИИЖТом [7,8], показали, что коэффициент тяги электровозов ВЛ80рн на 8,4 % выше, чем ВЛ80р; во время разгона, т.е. в диапазоне высоких токовых нагрузок жесткость тяговых характеристик электровозов ВЛ80РН и ВЛ80р сближается и их тяговые возможности почти не отличаются.