Общие сведения.
Электропривод является самым распространенным видом привода и широко применяется на путевых машинах. Он достаточно компактен, допускает перегрузки, обеспечивает возможность дистанционного и автоматического управления.
В машиностроении электропривод применяется переменного и постоянного тока. Наибольшее распространение получил электропривод переменного тока. Он проще в изготовлении и эксплуатации, более долговечен. Однако в нем затруднено изменение частоты вращения двигателя и, как следствие, скорости рабочего органа. Электропривод выполняют с использованием электродвигателей трехфазного тока (рис. 6). Однофазный электропривод переменного тока дает значительные потери мощности, поэтому его применение ограничено осветительными и бытовыми приборами и устройствами управления.
Привод с электродвигателями постоянного тока более сложен в изготовлении и эксплуатации, однако он позволяет получить оптимальные тяговые характеристики. При увеличении нагрузки на валу двигателя постоянного тока его частота вращения снижается, но увеличивается крутящий момент, т. е. усилие на рабочем органе, что эффективно, например, при движении экипажей. Поэтому электропривод постоянного тока нашел широкое применение в тяговых устройствах локомотивов, путевых машин. Кроме того, постоянный ток используют для управления электро-, пневмо- и гидроприводом. Так как аккумуляторы и химические элементы вырабатывают постоянный ток, он применяется также для аварийного освещения, запуска двигателей внутреннего сгорания.

Рис. 6. Привод двигателя трехфазного тока:
М — электродвигатель; Q — рубильник; F1—F 5 — предохранители; ΚΙ, К2— тепловые реле; КЗ, К4— пускатели; SI — кнопка «стоп»; S2—выключатель «вперед», «назад»; S3, S4—конечные выключатели
Источники тока.
Для питания электропривода током служат аккумуляторы и электростанции, состоящие из генератора, дизеля для его вращения, пускорегулирующей и контрольной аппаратуры. На путевых машинах применяются электростанции У12, У14, У36 мощностью 125 и 250 кВ·А, напряжением 400 В, частотой вращения 25 с-1. В них применяются дизели У1Д6-150 (мощностью 110 кВт), 1Д12-В-300 (мощностью 220 кВт) и генераторы С-117-4, ГС 104-4, ГСФ-200.
Генераторы переменного тока различают по системе возбуждения: с возбуждением от электромашинного возбудителя, т. е. от генератора постоянного тока, вращающегося совместно с основным генератором, и статической системой возбуждения, т. е. от полупроводниковых выпрямителей, встроенных в генератор. Последние являются более современными и прогрессивными.
Ротор генератора переменного тока представляет собой набор магнитов, снабженных катушками, по которым пропускается постоянный ток для создания магнитного поля. Процесс намагничивания ротора называется возбуждением. Рабочее напряжение в этих машинах снимается с обмоток статора.
У генераторов постоянного тока магнитный поток создает статорная обмотка, поэтому у них возбуждается статор, а рабочее напряжение снимается с обмоток ротора. В путевом и транспортном машиностроении применяются в основном генераторы постоянного тока с самовозбуждением.
В качестве автономного источника питания на путевых машинах применяют железоникелевые аккумуляторы напряжением 24 В. Они просты и надежны в эксплуатации, имеют большой срок службы. В батареях аккумуляторы соединены последовательно и параллельно в количествах, обеспечивающих необходимые напряжения и ток питания из расчета среднего рабочего напряжения 1,15 В на один аккумулятор. Для их электрического соединения используют медные или стальные плоские перемычки.
Для запуска двигателей внутреннего сгорания применяют кислотные стартерные аккумуляторные батареи. Они тяжелее щелочных, менее надежны в эксплуатации, но позволяют значительные кратковременные перегрузки, что и необходимо для запуска двигателей, особенно в холодное время года. Примерная марка стартерной батареи — 6CT-54 (6 — число банок в батарее, что соответствует напряжению 12 В, СТ—стартерная, 54—емкость батареи, А-ч); железоникелевых аккумуляторов — ТЖН-300 (ТЖН — тяговая, железоникелевая, 300 — емкость, А-ч).
В процессе эксплуатации аккумуляторы необходимо заряжать. Для зарядки аккумуляторов применяются электромашинные зарядные установки и статические зарядные агрегаты. Первые — это мотор-генераторные агрегаты, состоящие из двигателя переменного тока, включаемого в трехфазную сеть, и генератора постоянного тока. Агрегаты снабжаются необходимой регулирующей аппаратурой и контрольными приборами. Вторые — это статические выпрямители, у которых преобразование тока осуществляется полупроводниковыми приборами. Они включаются в одно- или трехфазную сеть переменного тока. Выпускаются зарядные агрегаты на напряжение 12—110 В и зарядный ток до 150 А.
Электродвигатели.
Двигатели переменного тока бывают асинхронными и синхронными. Трехфазный асинхронный двигатель был изобретен русским инженером М. О. Доливо-Добровольским в 1890 г. В настоящее время трехфазные асинхронные двигатели получили самое широкое распространение. Асинхронный двигатель состоит из статора (неподвижной части машины) и ротора (подвижной части машины), внутри которых уложена обмотка, питаемая трехфазным током. Асинхронные двигатели бывают с фазным и короткозамкнутым ротором. У двигателей с короткозамкнутым ротором концы обмотки соединяются между собой, а у двигателей с фазным ротором (рис. 7, а) — в «звезду» и выводятся на контактные кольца. При включении двигателя в электрическую цепь концы обмотки соединяют с пуско- регулировочным реостатом.
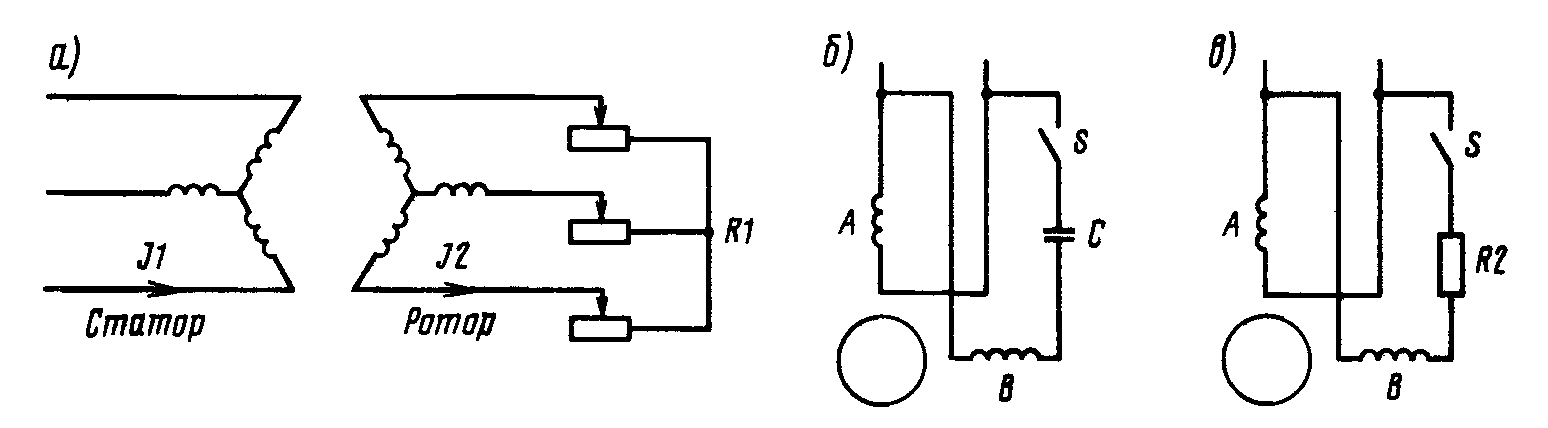
Рис. 7. Схема включения асинхронного двигателя:
11 — ток статора, 12— ток ротора, R1 — пускорегулировочный реостат, R2 — активное сопротивление, С — конденсатор, S — выключатель, А, В — рабочая и пусковая обмотки
Обмотка статора двигателя трехфазного тока, состоящая из трех катушек, создает магнитное поле с двумя полюсами. За один период трехфазного тока магнитное поле сделает один оборот. При частоте 50 Гц это будет соответствовать частоте вращения 50 с-1. При четырехполюсном статоре, т. е. числе катушек 6, частота вращения ротора будет 25 с-1. Характерной особенностью асинхронных двигателей является отставание ротора от синхронной частоты. Например, при частоте магнитного поля 25 с-1 частота вращения ротора будет 22—22,2 с-1. Поэтому эти двигатели называются асинхронными. Разность между частотой вращения магнитного поля и частотой вращения ротора называется скоростью скольжения.
Преимуществами двигателей с короткозамкнутым ротором являются: простота конструкции, возможность кратковременных перегрузок, приблизительно постоянная скорость при разных нагрузках, простота пуска и легкость его автоматизации, высокий к. п. д. К недостаткам относятся — затруднение в регулировании частоты вращения и большие пусковые токи. Преимуществами двигателей с фазным ротором являются большой начальный пусковой момент и возможность регулирования частоты вращения в некоторых пределах. К недостаткам относятся сложность изготовления и эксплуатации. Поэтому они нашли свое применение только в технически обоснованных случаях: в крановом и металлургическом машиностроении.
Статор однофазного асинхронного двигателя в отличие от трехфазного имеет однофазную обмотку, а ротор — короткозамкнутую. Однофазный ток не создает вращающегося магнитного поля, поэтому на статоре располагают вторую, так называемую пусковую обмотку, сдвинутую относительно рабочей обмотки на угол, близкий к 90 ° Обе обмотки питаются от сети однофазного тока. Для создания сдвига фаз между токами обеих обмоток последовательно с пусковой обмоткой включается конденсатор (рис. 7, б) или активное сопротивление (рис. 7, в).
Двигатели, у которых частота вращения магнитного поля статора совпадает с частотой вращения ротора, называются синхронными. В синхронных двигателях на статоре расположена трехфазная обмотка. Ротор синхронного двигателя имеет обмотку возбуждения, которая питается постоянным током от специального источника — возбудителя. Кроме того, в большинстве случаев для пуска двигателя на роторе располагается также короткозамкнутая обмотка. При подаче напряжения трехфазной сети к обмотке статора в нем возникает вращающееся магнитное поле, которое, взаимодействуя с короткозамкнутой обмоткой ротора, приводит последний во вращение. При достижении ротором частоты вращения, близкой к синхронной, на его обмотку возбуждения подается постоянное напряжение. Ротор начинает вращаться с синхронной скоростью, т. е. со скоростью вращения магнитного поля.
Преимуществами синхронных двигателей являются: постоянство частоты вращения при различных нагрузках, возможность работы с высоким коэффициентом мощности cos φ, возможность компенсации cos φ. Коэффициент мощности cos φ — это отношение активной мощности к полной. Активная мощность затрачивается на полезную работу либо на выделение тепла. В цепях электрического тока, помимо активной нагрузки, присутствуют также индуктивная и емкостная, которые могут быть как полезными, так и вредными. Полная мощность расходуется на преодоление всех этих нагрузок, поэтому cos φ всегда меньше единицы. Повышение cos φ позволяет полнее использовать мощность электростанций.
К недостаткам синхронных двигателей относятся невозможность регулировки частоты вращения, большая стоимость, наличие двух родов тока, сложность пуска. Поэтому синхронные двигатели нашли применение в непрерывно действующих установках, а также в устройствах управления, где требуется фиксированная частота вращения.
Для изменения направления вращения (реверсирования) двигателей переменного тока необходимо поменять местами любые два провода из трех, идущих к обмоткам статора, а в однофазных — поменять местами концы пусковой обмотки.
Двигатель постоянного тока так же, как и переменного, представляет собой машину, состоящую из статора и ротора. Статорная обмотка называется обмоткой возбуждения. Пропущенный через нее постоянный ток создает постоянный магнитный поток полюсов. Ротор двигателя постоянного тока представляет собой множество рамок из проводников, концы которых выведены на коллектор. Проводники обмотки ротора, называемого также якорем, по которым проходит ток, находясь в магнитном поле, созданном полюсами статора, выталкиваются из этого магнитного поля, чем и создается вращение ротора.
По способу возбуждения двигатели постоянного тока делятся на двигатели с параллельным, последовательным и смешанным возбуждением.
Обмотка возбуждения у двигателя с параллельным возбуждением (рис. 8, а) включена в сеть параллельно с якорем. Характерной особенностью двигателя с параллельным возбуждением является почти постоянная скорость вращения при изменении нагрузки. Регулирование частоты вращения производится изменением магнитного потока регулировочным реостатом R2 в цепи возбуждения. Этот способ является наиболее экономичным. Реостат R1 служит для уменьшения пускового тока якоря.
У двигателя с последовательным возбуждением (рис. 8, б) обмотки возбуждения и якоря соединены последовательно, поэтому ток, протекающий по обеим обмоткам, будет одинаков. Частота вращения этого двигателя с нагрузкой резко меняется, так как вместе с изменением тока якоря изменяется магнитный поток полюсов. При увеличении нагрузки уменьшается частота вращения двигателя возрастает вращающий момент на его валу. Частота вращения этого двигателя регулируется изменением напряжения или магнитного потока полюсов реостатом R1. Этот способ неэкономичен, так как в реостате теряется много энергии на тепло. Двигатели с последовательным возбуждением применяются в качестве тяговых в локомотивах и путевых машинах.
Наличие двух обмоток у двигателя со смешанным возбуждением (рис. 8, в) позволяет использовать преимущества двигателей параллельного и последовательного возбуждения. При соответствующем включении обмоток двигатель будет приближаться по свойствам к двигателю с параллельным и последовательным возбуждением в зависимости от того, какая из обмоток будет иметь большую намагничивающую силу. Частота вращения двигателя со смешанным возбуждением регулируется регулировочным реостатом, включенным в цепь параллельной обмотки возбуждения R2.
Аппаратура управления и контроля.
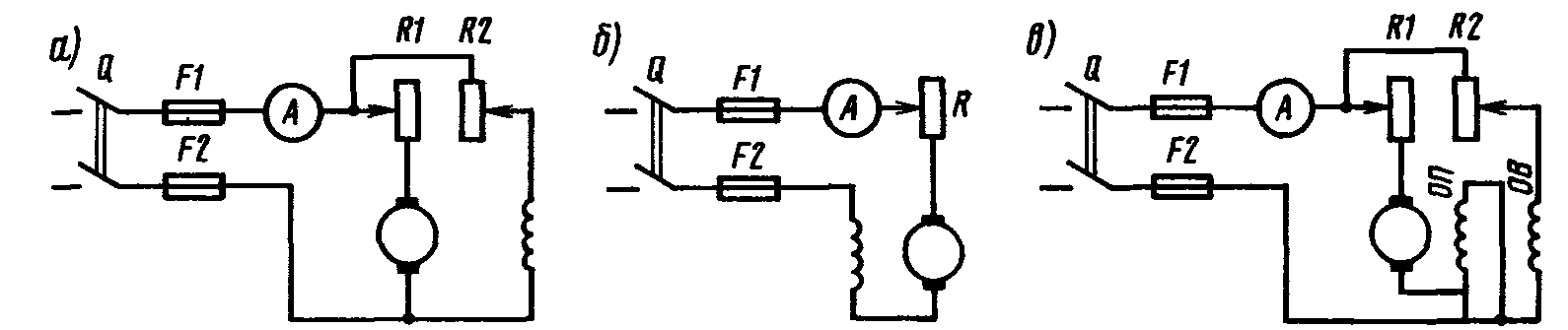
Рис. 8. Схема двигателя постоянного тока:
ОП — пусковая обмотка; ОВ — обмотка возбуждения, А — амперметр, F1, F2 — предохранители; Q — рубильник, R1 — пусковой реостат; R2 — регулировочный реостат
Электрическими устройствами управления называют аппараты, устанавливающие режимы работы электрооборудования машин и распределительных сетей низкого напряжения. Электрические аппараты разделяют на аппараты управления и аппараты распределения энергии.
К аппаратам управления относят контакторы, магнитные и ручные пускатели, силовые контроллеры, реле, кнопки, командоконтроллеры, путевые выключатели и переключатели, регулировочные и пусковые реостаты.
К аппаратам распределения энергии относят автоматические выключатели, ручные выключатели и переключатели (рубильники, пакетные выключатели), предохранители, контактные разъемы и т. д. Все эти аппараты имеют много общего в принципе действия, выполняемых функциях, конструктивном оформлении узлов, а также технических характеристиках и параметрах.
Аппараты управления коммутируют (соединяют) электрические цепи, осуществляют пуск, торможение, реверсирование и изменение частоты вращения электрических машин, обеспечивают управление механизмами в заданной последовательности, их защиту. Аппараты распределения энергии предназначены для распределения энергии, автоматического отключения отдельных участков электрической цепи при возникновении в них аварийных режимов (тока короткого замыкания и перегрузки, понижения или повышения напряжения по сравнению с номинальным), отключения и включения потребителей по команде оператора.
По принципу действия электрические аппараты разделяют на контактные и бесконтактные. Контактные аппараты имеют контактную систему, осуществляющую видимый на глаз разрыв электрической цепи. Коммутирующий элемент бесконтактных аппаратов представляет собой электрическое сопротивление, изменяющееся в достаточно больших пределах по сравнению с сопротивлением коммутируемой цепи. Бесконтактные аппараты не нашли широкого применения в путевых машинах, так как их необходимо ставить последовательно с контактными аппаратами.
Для контроля параметров электрических цепей применяются контрольные приборы. Напряжение измеряется вольтметрами, ток — амперметрами, мощность — ваттметрами, частота — частотомерами. В путевых машинах применяются в основном стрелочные приборы. Однако в устройствах автоматики применяются также цифровые и самопишущие приборы (вольтметры, амперметры и др.).