Системы автоматической выправки пути в продольном профиле, в плане и по уровню
Постановка пути в требуемое положение в продольном профиле, в плане и по уровню при различных видах ремонта и текущего содержания пути осуществляется выправочно-подбивочно-отделочными и рихтовочными машинами непрерывного и цикличного
действия. На этих машинах установлены автоматические системы, которые обеспечивают одновременно выправку в трех координатах (в продольном профиле, в плане и по уровню) или рихтовку пути (выправку в плане). Конструкция и элементная база применяемых выправочных систем весьма многообразны. Вместе с тем по принципу действия применяемые выправочные системы имеют много общего.
Для выправки пути в продольном профиле и в плане различают два класса систем: системы, работающие по принципу сглаживания (уменьшения) встречающихся неровностей пути; системы, обеспечивающие постановку пути на заданные (проектные) отметки в продольном профиле и заданную ось в плане.
В виду своей простоты и универсальности наибольшее распространение в практике получили сглаживающие системы. По количеству измерительных точек, входящих в выправочную систему, различают трехточечные и четырехточечные системы. Характерной особенностью сглаживающих систем является то, что исполнительный механизм (подъемный для продольного профиля и сдвигающий для плана) находится между измерительными точками системы. Для того чтобы сформировать команду на подъем и сдвиг, положение пути измеряется с помощью промежуточных измерительных тележек относительно базисной линии — прямой, соединяющей концевые измерительные тележки. Эти тележки вместе с промежуточными размещаются на рельсовой колее, шарнирно связаны с фермой машины и в процессе работы движутся вместе с ней.
Трехточечная система (рис. 36,а) имеет три измерительные тележки, в которых размещены измерительные тележки: 1 — движется по невыправленному пути; 4 — выправляемая точка находится вблизи исполнительного механизма 3; 5 — движется по выправленному пути. Между концевыми измерительными тележками 1 и 5 проходит базисная линия 2. На измерительной тележке 4 находится измерительный механизм с датчиком, который измеряет перемещение тележки 4 относительно базисной линии 2 и выдает команды исполнительному механизму 3. Принцип работы трехточечной системы для прямых участков пути заключается в постановке управляемой точки 4 на прямую, соединяющую концевые тележки 1 и 5, т.е. расстояние (программная стрела) от выправляемой точки до базисной линии для прямого участка должно быть равно нулю. Для кривых участков задается определенное значение программной стрелы в зависимости от радиуса круговой кривой. Таким образом, команда на перемещение исполнительного механизма не поступает, когда три измерительные точки находятся на одной прямой или когда программная стрела в точке 4 равна величине, определяемой параметрами кривой.
Рассмотрим принцип формирования команд на исполнительный механизм трехточечной выправочной системы на прямом участке пути. Допустим, что передняя измерительная точка А (рис. 36,б) системы находится на неровности у1. Так как все три точки системы должны лежать на одной прямой, в измерительной точке В' датчик сформирует команду исполнительному механизму, и точка В' займет положение точки В, т.е. встанет на прямую, соединяющую точки А и С. Перемещение ∆у1 определяется из подобия треугольников АСА' и ВСВ': ![]()
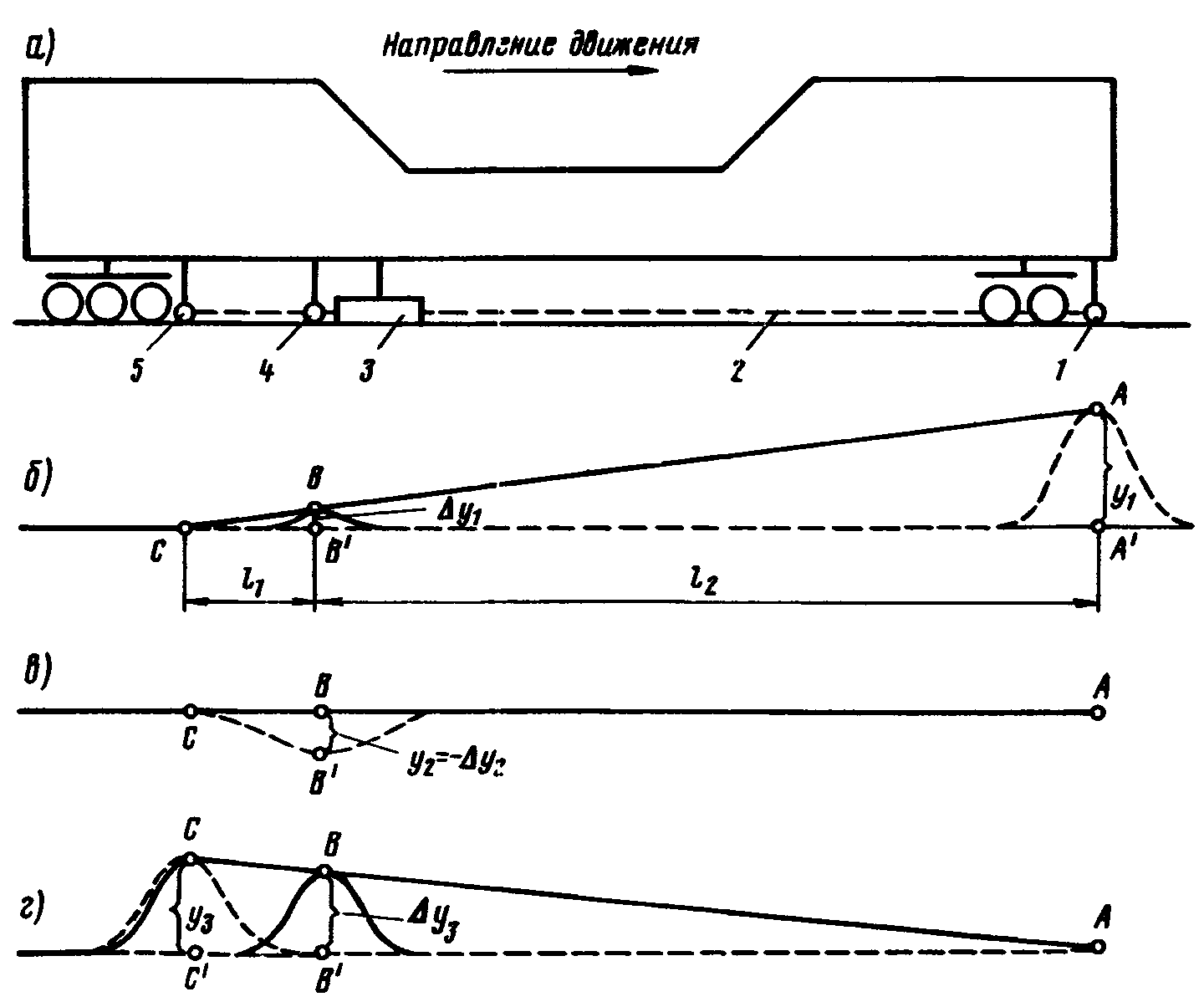
Рис. 36. Схема работы трехточечной выправочной системы сглаживающего типа
где l1— расстояние от задней точки измерительной системы до средней, м, 12 — расстояние от средней точки измерительной системы до передней, м.
При возникновении неровности у2 в месте расположения измерительной точки В (рис. 36,в), находящейся вблизи исполнительного механизма, появится команда, и точка В' переместится в точку В, т.е. на прямую, проходящую через две другие измерительные точки А и С. Таким образом, перемещение от неровности у2, возникшей в этой точке, будет равно величине появившейся неровности, но с противоположным знаком: ∆у2 = —у2.
Четырехточечная система имеет свои преимущества и недостатки по сравнению с трехточечной системой. Преимущества заключаются в том, что при одинаковой длине измерения сравниваемых систем четырехточечная система имеет больший коэффициент сглаживания. Вместе с тем теоретические и экспериментальные исследования показали, что четырехточечная система при l1<l3 очень чувствительна к ошибкам настройки и погрешностям измерения, и при наличии их (а они присутствуют в любой реально существующей системе) возникает накапливающийся увод пути, т.е. система при определенных соотношениях геометрических размеров становится неустойчивой. Трехточечная система с управляющей средней точкой устойчива при любых соотношениях геометрических размеров.
Трехточечные и четырехточечные системы при наличии дополнительной информации могут работать не только по способу сглаживания, но и по способу постановки пути в заданное проектное положение в плане и в продольном профиле.
Наряду с общими принципами работы сглаживающих систем существует многообразие их конструктивного выполнения. По виду выполнения базисной линии различают: лучевые системы, тросовые системы и системы с жесткими связями. В свою очередь в системах с лучевой базой отсчета используются рассеянный луч, модулированный, инфракрасный и др. В тросовых системах используется стальной трос, натянутый между концевыми тележками. Жесткие связи представляют собой различной конфигурации балочки, связывающие измерительные тележки выправочной системы.
Датчиками измерения перемещения базы отсчета относительно измерительных тележек в системах автоматической выправки пути в продольном профиле и в плане в зависимости от вида используемой базы являются: фотодиоды, сельсины, потенциометры, индуктивные датчики линейных перемещений и др. В зависимости от типа применяемых датчиков используют соответствующие усилительно-преобразовательные устройства. Для исполнения команд, поступающих от датчиков, т.е. для перемещения пути в вертикальной и горизонтальной плоскостях используется в основном два типа приводов: электромеханический и электрогидравлический. Электрогидравлический привод может быть с релейным и пропорциональным управлением. При релейном управлении скорость перемещения исполнительного механизма постоянная и не зависит от величины входного воздействия, а при пропорциональном управлении скорость перемещения исполнительного механизма определяется величиной входного воздействия. Эта скорость тем больше, чем больше входное воздействие, и, наоборот, при малых входных воздействиях она пропорционально уменьшается.
На сети железных дорог работают машины, оборудованные различными системами автоматической выправки пути в плане (рихтовка) и в продольном профиле. Так, рихтовка пути осуществляется: электробалластерами с навесным рихтующим устройством, рихтующими машинами Балашенко, рихтующими машинами Р-2000, несколькими типами рихтовочных устройств, установленных на ряде машин ВПО-3000.
Одновременная автоматическая выправка пути в плане и продольном профиле осуществляется системами, установленными на машинах ВПР-1200 и ВПРС-500, а также на ряде эксплуатируемых машин ВПО-3000.
Выправка пути на прямых и круговых кривых участках пути по уровню выправочно-подбивочными машинами непрерывного и цикличного действия осуществляется также автоматически. Датчиками измерения положения пути по уровню являются маятники. Конструкции применяемых маятниковых датчиков довольно разнообразны. По принципу действия они разделяются на два класса: с контактным и бесконтактным способами преобразования измеряемых углов в электрический сигнал.
В основном во всех существующих автоматических системах применяются маятники контактного типа. Примером такой системы является автомат уровня, устанавливаемый на машинах ВПО-3000, который содержит маятник, подвешенный внутри фермы машины.
При отклонении рельсовых нитей по уровню от заданного положения маятник замыкает электрические контакты, подавая питание на катушку одного из промежуточных реле, управляющих электромагнитными муфтами реверс-редуктора механизма подъема электромагнита, и путь ставится в заданное положение.
В переходных кривых отвод возвышения создается за счет изменения взаимного положения управляющих контактов автомата уровня относительно корпуса маятника при помощи специального многоосевого pеверc-редуктора с электромагнитными муфтами, позволяющими делать отвод возвышения: 0,5/1000; 1/1000; 2/1000. Пропорциональность смещения контактов пройденному машиной пути обеспечивается следящим приводом реверс- редуктора, включающим двигатель постоянного тока, масштабный измерительный ролик, сельсин-датчик и сельсин-приемник, работающие в трансформаторном режиме, электронный и электромагнитный усилители.
В процессе работы ферма машины испытывает переменные нагрузки, вызывающие ее деформацию относительно продольной оси. Кроме того, электрические контакты окисляются и подгорают, пружины контактов тоже изменяют свои характеристики. Все это вносит погрешности в работу системы автоматической выправки пути по уровню.
На машинах ВПР-1200 и ВПРС-500 в системах автоматической выправки пути по уровню используются также маятниковые датчики контактного типа.
На зарубежных железных дорогах при ремонтах пути также широко используются выправочно-подбивочно-рихтовочные машины, которые оборудованы системами автоматической выправки пути в плане, в продольном профиле и по уровню.
Системы автоматической выправки пути в продольном профиле и в плане, установленные на зарубежных машинах, работают по принципу сглаживания. Геометрический коэффициент сглаживания т = 4-:-10. Элементная база применяемых систем очень разнообразна. Для постановки пути в проектное (заданное) положение иногда используют лазерные системы, посредством которых осуществляется регулирование передней точки сглаживающей системы. Лазерный передатчик находится на специальной выносной передней тележке. Передняя тележка с лазерным передатчиком устанавливается на расстоянии от 200 до 600 м перед машиной. Расстояние определяется в зависимости от условий видимости и погоды, так как лазерный луч, как и всякий другой, подвергается влиянию условий видимости.
Приемное устройство лазерного луча состоит из фотоэлементов, расположенных по горизонтали и по вертикали. Передний конец базовой линии сглаживающей системы снабжен сервомеханизмом, который перемещает этот конец в зависимости от сигналов, получаемых приемным устройством от лазерного луча.
Наряду с положительным эффектом эта система имеет недостатки. Использование лазерного луча возможно лишь на идеальных прямых и без переломов продольного профиля пути.