Первое конкретное упоминание о поступательных машинах содержится в патенте, выданном на имя мэра г. Питтсбурга в 1890 г. и касающемся создания индукционных машин [155]. Вслед за этим в 1895 г. последовал патент, выданный на ИМЯ Weaver Jacgnard and Electric Shuttle Company, владельцы которой, судя по ее названию, всерьез надеялись воспользоваться такой машиной для приведения в движение челноков в ткацких станках.
В 1905 г. было выдвинуто два разных предложения об использовании поступательных индукционных двигателей на железнодорожном транспорте. Согласно одному из них [182], в железнодорожную колею укладывались короткие секции первичного элемента, включаемые по мере необходимости. Согласно второму предложению [155], первичный элемент должен находиться на движущемся вагоне, а вдоль железнодорожного пути укладывается специальный реактивный рельс типа листового вторичного элемента. Эта идея фактически оказалась предшественником обширных экспериментов, проводимых в наши дни в ряде стран.
В 1917 г. появился первый трубчатый двигатель, представлявший собой релактанскую машину постоянного тока с коммутируемыми первичными обмотками [155].
В 1922 г. Тромбетта предложил конструкцию дыропробивного пресса с приводом от дугового статора, но этот статор имел столь низкий к.п.д. и выделял так много тепла, что мог быть включен лишь на несколько минут [92, 174].
В 1923 г. был предложен плоский индукционный двигатель для приведения в движение непрерывной платформы, которую предполагалось соорудить в Нью-Йорке, под 42-й улицей, между площадью Таймс- Сквер и вокзалом Гранд-Сентраль—Стейшн. Был даже сооружен экспериментальный участок платформы, однако это предложение так и не использовано [155].
Дуговые статоры, спроектированные П.А. Фридкиным для текстильных кардмашин в 1930 и 1933 гг., также не могли длительно работать. Первый из статоров имел к.п.д. 0,19, второй — 0,27, лишь у третьей конструкции дугового статора удалось получить к.п.д. 0,42. Кардмашины с дуговыми статорами этой конструкции были первыми машинами, которые допускали длительное включение. Дальнейшее совершенствование конструкций дуговых статоров для кардмашины позволило получить при мощности 1 кВт к.п.д. 0,53 (1934 г.) и 0,64 (1935 г.). Несколько таких кардмашин было установлено в 1935 г. на ленинградских фабриках.
В 1936 г. П. А. Фридкин начал разрабатывать дугостаторный электропривод для крупнейших в то время барабанных углеразмольных мельниц. В 1938 г. машина была испытана и в 1939 г. введена в эксплуатацию на ТЭЦ и Мосэнерго. Машина имела два дуговых статора трехфазного тока, каждый на 200 кВт, 50 Гц, с синхронной скоростью 0,517 об/с. Аналогичная машина была установлена на Челябинской ТЭЦ в 1942 г. [92].
В 1940 г. Б. Д. Садовским впервые получены кривые распределения индукции по длине индуктора. Условия возбуждения магнитных полей, соответствующих мгновенным значениям переменных токов, создавались включением обмотки индуктора в цепь постоянного тока. С этой целью каждая из фаз этой обмотки получала питание от отдельного генератора постоянного тока [82].
С развитием энергетики, промышленности и транспорта в послевоенное время значительно возросла потребность в дугостаторных машинах в самых различных отраслях народного хозяйства. С 1946 по 1966 г. П.А. Фридкиным по заявкам организаций были разработаны дугостаторные электроприводы для компрессоров, лифтов, прессов и текстильных машин, дугостаторные тахометры для судов и датчики для автоматов правки тканей, линейные двигатели для опытных бассейнов и ряда специальных механизмов. На разработанные устройства получены авторские свидетельства в СССР и патенты за границей [92].
Ряд образцов и моделей дугостаторных машин экспонировался на выставках.
Впервые широкое применение поступательных двигателей на транспорте началось в 1946 г., когда фирмой Westinghouse была создана самолетная пусковая установка типа "Электропульт" [116, 155]. Система первичных обмоток монтировалась на тележке, а вторичный элемент представлял собой ферромагнитную структуру с обмоткой, уложенной в пазы. Этот двигатель во многом напоминал примитивную машину с длинным вторичным элементом. Были сооружены две экспериментальные установки в натуральную величину: одна длиной 1 км, другая — более 1,5 км. Коммутация обмоток осуществлялась с помощью щеток, перемещающихся по канавкам вдоль вторичного элемента. Двигатель развивал мощность 10000 л.с. и обеспечивал скорость до 360 км/ч. Реактивный самолет массой 4,5 т на полосе длиной 165 м за 4,2 с удавалось разгонять до скорости 187 км/ч. Впоследствии от этой системы отказались под предлогом высоких капиталовложений, связанных с ее созданием.
К классу поступательных двигателей относятся и машины, предназначенные для создания колебательного движения без помощи внешних коммутационных устройств.
В 1957 г. была доказана возможность использования для этой цели многофазной индукционной системы [150]. В 1960 г. появились синхронные колебательные машины.
Кроме индукционных двигателей переменного тока, были разработаны линейные двигатели постоянного тока. По сравнению с индукционными машинами поступательный вариант машины постоянного тока пока еще переживает детский возраст, однако уже появились сведения о целесообразности его применения в качестве привода [55, 56].
Теоретический приоритет в области индукционных электрических машин принадлежит СССР. В 1948 г. группой ученых во главе с Г. И. Штурманом впервые была разработана теория одной из особенностей линейного асинхронного двигателя — продольного первичного концевого эффекта [94—99].
Однако основным стимулом развития теории взаимодействия бегущего магнитного поля с проводящей средой послужило применение ее в прикладной магнитной гидродинамике. С появлением ядерных реакторов возникла потребность в создании насосов для перекачивания жидких металлов, в частности натрий—калиевых смесей высокой проводимости. В результате были созданы двигатели и постоянного, и переменного токов в плоском двустороннем и трубчатом вариантах. Были предложены машины переменного тока не только индукционного, но и кондукционного типа [21, 100]. Предпочтение, как правило, отдавалось не трубчатым, а плоским машинам ввиду того, что в случае перегорания первичной обмотки в трубчатой машине приходится разбирать трубопровод, по которому циркулирует теплоноситель. Один двигатель из этого семейства содержал цилиндрический статор более или менее обычного вида, создававший вращающееся поле, в котором по спиральному каналу от одного края статора к другому перегонялся жидкий металл. Таким образом, в этом двигателе был применен принцип "углового поля", послуживший впоследствии основой для создания экспериментального двигателя с переменной скоростью.
С середины 50-х годов теория взаимодействия бегущего магнитного поля с проводящей средой начала быстро развиваться, и сейчас уже имеется большое количество трудов по данному вопросу. В СССР основоположниками работ в этом направлении следует считать А. И. Вольдека, И. М. Кирко, И. А. Тютина [20-37, 40—47, 87-91]. Немалый вклад в развитие теории линейных асинхронных машин внесли Н. М. Охременко [59-71], Х. И. Янес [101-102], Т. А. Веско [8-11], Э. К. Никои [103], Я. Я. Лиелпетер 152-54], А. Я. Вилнитис [14-18], Я. Я. Валдманис [5-7], Ю.К. Круминь [46-51].
Очень интересны работы, проведенные в СССР, по индукционному перемешиванию металла в плавильных печах [40, 73, 77, 79, 81, 85].
В 1962 г. Л. А. Верте был предложен индукционный желоб для транспортировки жидкого металла. Индукционный желоб не перспективен для транспортировки металла на сколько-нибудь значительные расстояния, но он может найти применение для перемещения металла на расстояние до нескольких метров, в особенности при сочетании с той или иной его технологической обработкой. Под руководством Л. А. Верте были построены опытные желоба для чугуна [12, 13]. Был изготовлен длительно действующий опытный желоб для чугуна относительно небольших размеров.
В Киеве на территории Выставки передового опыта УССР успешно эксплуатируется монорельсовая дорога. Статор линейного двигателя смонтирован в вагоне на независимой подвеске. Мощность двигателя 5 кВт. Специальные автоматические системы позволяют поддерживать между статором и ротором постоянный зазор 3 мм. Торможение осуществляется путем изменения последовательности чередования фаз [19, 39, 57]. Плавный пуск и регулирование скорости производились трехфазным потенциал-регулятором, изменяя подводимое к токоприемникам вагона и к тяговым электродвигателям напряжение в пределах от 0 до максимального значения 500-600 В.
Система управления предусматривает возможность электрического торможения тяговых электродвигателей не только противовключением, но и разрешает производить электродинамическое торможение с питанием обмоток статоров от аккумуляторной батареи.
В результате плодотворного содружества работников Киевского завода электротранспорта им. Ф. Э. Дзержинского и ученых Киевского политехнического института разработано несколько опытных образцов асинхронных электродвигателей с развернутым статором для нужд народного хозяйства, получено несколько авторских свидетельств на изобретение [195-198] (рис. 1).
Аналогичные работы ведутся под руководством профессора, д-ра техн. наук Скобелева В. Е. учеными Ленинградского ордена Ленина политехнического института в содружестве с учеными Всесоюзного научно-исследовательского, проектно-конструкторского и технологического института электровозостроения.
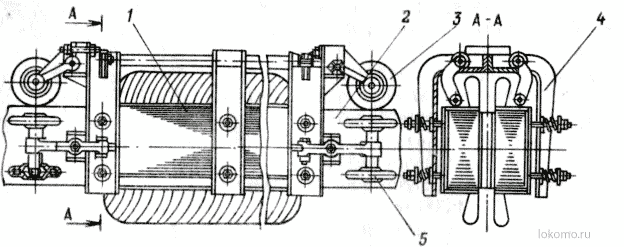
Puc. 1. Принципиальная конструкция АД с развернутым статором
В 1972 г. на Новочеркасском электровозостроительном заводе по проекту ВЭлНИИ было создано два стенда для исследования физических процессов, происходящих в линейных асинхронных двигателях. Относительное поступательное движение статора и ротора заменено вращательным, причем лабораторный макет тягового линейного двигателя (ТЛД) был разработан и выполнен так, чтобы все физические процессы протекали, как в реальном ТЛД, и было обеспечено удобство исследований. Он состоит из индуктора с двойным статором, несущим обмотку и установленным на раму, так что зазор между сердечником может регулироваться в пределах 20-50 мм [204-206].
Особенностью данного исполнения линейного двигателя, отличающей его от аналогичных установок [108], является дугообразная форма сердечников индуктора. Подобная установка создана специалистами INR в Японии [149].
В 1962 г. опубликована статья о работах Манчестерского университета по проектированию и испытанию линейного двигателя. Двигатель спроектирован по заказу Британской транспортной комиссии доктором Laithwaite E. R. в сотрудничестве с доктором Barwell F. J. [152, 153, 158].
В 1966 г. организованы в Великобритании одновременно две фирмы- Hovercraft Development Ltd, Tracked Hovercraft Ltd по проектированию, разработке и исследованию экипажей на воздушной подушке с приводом от линейного асинхронного двигателя [190, 191-194-198]. Исследования, проведенные этими фирмами, позволили создать, судя по сообщениям в печати, работоспособный экипаж с односторонними линейными асинхронными двигателями. Двигатель располагается горизонтально, а ротор представляет собой горизонтально лежащую полосу из немагнитного металла на пакете шихтованного сердечника, заделанного в полотно пути [127, 128, 190, 194-198]. По последним сведениям о работах этих фирм известно, что исследования системы высокоскоростного транспорта на воздушной подушке и с линейными асинхронными тяговыми двигателями с односторонним расположением первичной части двигателя проводились при питании трехфазным напряжением от контактной сети через преобразователь. Развиваемая скорость движения составила 130 км/ч. Сооружение всей установки, включая участок пути протяжением 1,8 км, стоило 5,25 млн.ф.ст. На этом опытном пути испытывается вагон RTV-31 длиной 22,8 м и массой 22,7 т. Тяговый электродвигатель при пуске развивает усилие 2000 кгс, а наибольшее усилие - около 3200 кгс. Напряжение питания 6000 В, 50 Гц. Постройку полномасштабного экспериментального вагона RTV-31 сдерживает необходимость установить наиболее целесообразную ширину реактивной шины (полосы) и выбрать алюминиевый сплав, обладающий достаточной механической прочностью, свариваемостью и малым электрическим сопротивлением. Пока принята ширина полосы 457 мм. Стабилизация обмотки возбуждения около реактивного рельса осуществляется электрогидравлической следящей системой [169].
Оценивая перспективные требования к транспортному обслуживанию в Северо-восточном коридоре, министерство транспорта США считает возможным соединить расположенные в этой зоне основные аэропорты системой высокоскоростного наземного транспорта. В качестве одной из возможных признают систему экипажей на воздушной подушке, перемещающихся по специальному пути. Такая система могла бы к концу 70-х гг. привлечь пассажиров ускоренными железнодорожными перевозками [119]. Помимо односторонних линейных двигателей, фирма разрабатывает конструкции двусторонних асинхронных двигателей [197]. Сейчас фирма Tracked Hovercraft Ltd разрабатывает поезд с диапазоном изменения частоты от 20 до 250 Гц.
Интересны работы этой фирмы над совершенствованием конструкции вторичной части линейного асинхронного двигателя [191, 194].
В 1967 г. опубликованы сведения о состоянии дел по разработке транспорта с линейным индукционным двигателем в США.
Был разработан газотурбовод с автономным питанием от газовой турбины мощностью 3000 л.с., которая приводила во вращение генератор переменного тока мощностью 2000 кВт через промежуточный одноступенчатый редуктор. Газотурбовод рассчитывается на скорость до 400 κκί/ч [122]. В 1968 г. в США была организована новая фирма Transportation Technology Institute [128], которая стала работать совместно С фирмой Air Research Corporation de Garrett. Правительство США поручил фирме Garrett Air Research, которая выполнила ранее исследования линейного тягового двигателя мощностью 1800 кВт, новую разработку линейного тягового двигателя "второго поколения" с мощностью, увеличенной до 6000 кВт. Новый линейный тяговый двигатель должен реализовать, по мнению специалистов, скорость движения 500 км/ч [112].
В 1969 г. этой фирмой разработан проект моторного вагона с линейными тяговыми двигателями с использованием железнодорожной колеи для испытания при скоростях более 400 км/ч [121]. В 1972 г. на международной выставке Transpo-72 были представлены экипаж на воздушной подушке "Аэроглиссер" фирмы Grumman, макет экипажа на рельсах с линейным двигателем фирмы Garrett Air Research "Аэроглиссер", рассчитанный на скорость до 500 км/ч. В настоящее время фирма Garrett Air Research работает над решением проблем сверхскоростного транспорта с линейным двигателем совместно с фирмами Department of Transportations Federal Railroud Administration Advanced Systems Division, Urban Mass Transportation Administration, Tracked air Cushion Research Vehicle [133—135].
Исследовательским институтом Стейнфорда (SRI) в 1970 г. разработана система магнитного подвешивания поезда с линейным тяговым двигателем. В течение двух лет сотрудники института вели теоретические разработки и исследования магнитного подвешивания, первоначально предназначенного для салазок с ракетным двигателем на скорость 9600 км/ч. Эти исследования и расчеты, проводимые в лаборатории низких температур, позволили предложить сравнительно простой по конструктивному выполнению принцип магнитного подвешивания пассажирского поезда при скорости 480 км/ч или более [176]. Ученые SRI предполагают, что магниты с сверхпроводниковой обмоткой смогут поднять вагоны поезда на высоту порядка 300 мм над металлической поверхностью пути и поддерживать вагоны вдоль средней линии пути [176].
С 1963 г. бельгийская фирма Merlin — Gerin ведет экспериментальные работы по созданию линейных двигателей для применения их на транспорте. Фирма начинала с изготовления тележки, движущейся по монорельсу, с установкой на ней линейного двигателя с двусторонним статором.
В 1968 г. в г. Лионе создан макет нового вида городского транспорта "Urba" , названного "летающим автобусом", движущегося под несущей балкой с опорными столбами.
Кабина находится в аэростатическом равновесии без какого-либо контакта с этой несущей балкой. Аэростатическое равновесие осуществляется путем воздушного всасывания [163, 180, 202].
Испытания показали, что при любой скорости "Urba" не производит ни малейшего шума. Кабина движется плавно, без галопирования и виляния. Фирма Merlin—Gerin создала промышленным способом линейный двигатель для "Urba".
Эти вагоны спроектированы фирмой Compaquie d’Energetique Lineare с линейными двигателями и покоятся на тележках "Dynavac" с четырьмя всасывающими вентиляторами для образования воздушной подушки на каждой тележке. В конце 1970 г. на участке длиной 4 км начались испытания тридцатиместного вагона "Urba-ЗО" в натуральную величину. Его максимальная скорость должна быть 80 км/ч [167].
Наиболее широкие исследования по наземному транспорту на воздушной подушке осуществлены во Франции фирмой e’Aerotrain.
Первые опыты с экипажем на воздушной подушке Aerotrain производились на пути длиной 7,6 км около Парижа с моделью вагона в половину натуральной величины.
Тяга Aerotrain создается с помощью авиационного винта, приводимого в движение двумя газовыми турбинами мощностью каждая по 1200 л.с. Подъем и направление вагона осуществляются шестью опорными и шестью направляющими воздушными подушками, в которые нагнетается воздух двумя вентиляторами, приводимыми в действие ГаЗОВОЙ турбиной МОЩНОСТЬЮ 550 Л.С. В качестве движителя Aerotrain предполагалось использовать линейный асинхронный двигатель, и сейчас такие работы ведутся фирмой Merlin-Gerin [157].
В 1969 г. на ярмарке в Ганновере Франция представила модель и проект поезда с линейными двигателями типа Rail-Jet. На вагоне аэродинамической обтекаемой формы были установлены линейные двигатели между колесами чуть выше рельсов, которые использовались в качестве роторов без дополнительных переделок.
Источником питания является газотурбинная установка с генератором повышенной частоты. Максимальная расчетная скорость вагона 300 км/ч [139]. На линейные двигатели типа Rail-Jet выданы патенты [200, 201].
Дальнейшие исследования показали, что использование путевых рельсов в качестве реактивной шины нецелесообразно и не дает должного эффекта [83, 115].
В 1970 г. были проведены испытания линейного двигателя фирмы Jehmont—Schneider, аналогичного Rail-Jet, в качестве тормоза. Во время опытных поездок в июне 1970 г. на линии Бордо—Дакс с локомотивной тягой двигатель использовался для торможения со скорости до 260 км/ч. Как отмечают специалисты, торможение было плавным, без толчков и износа рельсов [171].
В ФРГ фирмой Krauss — Maffei ведутся работы по созданию скоростного транспортного средства на магнитной подвеске. Эксперименты с моделями не обеспечили получения всей необходимой информации о работе магнитной системы вследствие неизбежного нарушения масштабности некоторых величин.
В связи с этим фирмой Krauss — Maffei были созданы лабораторные установки, имитирующие условия работы полноразмерных магнитных систем. При этом внешние механические воздействия на магниты генерировались гидропульсаторами, системы управления которыми обеспечивали возможность регулирования величины и частот воздействия. Аналогичная лабораторная установка была создана для изучения взаимодействия магнитных систем подвесок в линейных индукционных двигателях.
После проведения исследований фирмой Krauss - Maffei было начато проектирование вагона Transrapid 02 и пути для него. При этом ставилась задача не только обеспечения движения вагона без механического воздействия его с направляющей, но и выяснения поведения магнитной системы при действии динамических нагрузок.
На данном вагоне были проведены испытания двух линейных индукционных двигателей, изготовленных фирмами AEG-Telefunken и Merlin—Gerin (Бельгия). После завершения экспериментов с Transrapid 02 с сентября 1972 г. на этой же направляющей испытывалась следующая модель - Transrapid 03, отличающаяся подвесками магнитов к корпусу вагона. Основное назначение этой подвески — повышение плавности хода. В настоящее время фирма Krauss — Maffei сооружает новый опытный участок длиной 2500 м, на котором предполагается достижение скорости 350 км/ч. Для движения по этой направляющей был создан вагон Transrapid 04 [124, 132, 137]. Фирма Krauss — Maffei для г. Онтарио (Канада) разрабатывает систему скоростного транспорта с магнитным подвешиванием и линейными тяговыми двигателями [140].
Фирмой Siemens (ФРГ) составлен проект железнодорожного транспорта на электродинамическом подвешивании с использованием магнитов со сверхпроводящей обмоткой. Новый вид транспорта рассчитан на скорость движения 380-480 км/ч.
Для осуществления этого проекта, над которым работала исследовательская группа ИЗ представителей фирм AEG Telefunken, ВВС И Siemens, потребовалось около трех лет. Общая стоимость оценивается в 14 млн. зап.-герм. марок. Эти работы послужат основой для создания обширной транспортной системы, которая будет отличаться от существующих наземных транспортных систем более высокими скоростями, надежностью и минимальными воздействиями на окружающую среду [117, 179]. Помимо указанных фирм, магнитным подвешиванием занимаются еще фирма Krupp, которая демонстрировала систему, использующую магнитное отталкивание, и фирма Messerschmitt—Bolkow— Blohm (МВВ).
Вагон МВВ направляется и поддерживается приподнятым в воздухе благодаря электромагнитным силам, возбуждаемым токами в верхней части тяжелых стальных угольников, прикрепленных болтами и скобами к деревянным шпалам. Тяговое усилие создается линейным двигателем, ротор которого выполнен в виде реактивного алюминиевого рельса, расположенного в центре между двумя направляющими угольниками. Скорость вагона на коротком испытательном пути была довольно низкой (60 км/ч) [124]. Вагон МВВ имеет длину 7,5 м и весит вместе с двигателем, подъемным и направляющим электромагнитом 5,2 т.
Конструкция линейного двигателя представляет собой двусторонний статор с трехфазной обмоткой, длина статора около 5 м. Алюминиевая реактивная шина имеет высоту 500 мм и толщину 20 мм. Электромагниты возбуждаются постоянным током, энергоснабжение всего вагона осуществляется от контактных шин. В кузове имеются места для водителя и трех пассажиров [172].
В 1963 г. в Японии в железнодорожной исследовательской лаборатории был испытан линейный асинхронный двигатель, аналогичный двигателю, изготовленному в Англии. Испытания проводили и на модели подвижного состава. В это же время в Японии было высказано предположение о создании тяговых двигателей с расположением обмоток статора на поверхности земли через определенные интервалы [104].
Забегая вперед, надо сказать, что на основании теоретических работ, проведенных не только в Японии, показано, что двигатель с перемещающимся статором можно выполнить для подвижного состава лишь со скоростью до 300 км/ч, а при больших скоростях движения размеры и масса статора будут чрезвычайно большими, кроме того, предвидятся большие трудности с токосъемом. Для обеспечения энергоснабжения движущегося при столь больших скоростях статора принято решение вести проектирование с размещением обмоток статора на пути. Уже в декабре 1969 г. специалисты японских государственных железных дорог (INR) практически подтвердили первоначальные теоретические выводы, испытав опытный линейный асинхронный двигатель (ЛАД), питающийся переменным напряжением и частотой, при скоростях от 400 до 450 км/ч, и приняли на основании этих испытаний окончательное решение; Сверхскоростной поезд INR, рассчитанный на среднюю скорость движения 450-500 км/ч, будет состоять из 12 вагонов общей вместимостью около 1000 человек. Управление поездом предполагается выполнить полностью автоматическим, обеспечивающим минимальный интервал между поездами, равный 5 мин [143].
В 1965 г. фирмой "Футью Воркс" разработан вагон с линейным двигателем, который использовался в системе транспортировки осей колесных пар. Такая система в основном состоит из самой платформы для осей колесных пар, пульта дистанционного управления, шкафа- пульта управления системой, реактивной шины (вторичный проводник), троллей — токоснимателей и контроллеров. Реактивная шина, установленная на земле, изготовлена из алюминиевых пластин. По центру экипажа установлен агрегат из статоров линейного индукционного двигателя, причем между реактивным рельсом и статорами выдерживается небольшой зазор. Линейный двигатель управляется системой автоматического контроля с применением кремниевых выпрямителей [105, 106, 110, 111]. Эта система бы,ла внедрена в марте 1965 г. Двенадцатиполосная обмотка была выполнена длиной 700 мм и шириной 200 мм. Синхронная скорость 4,6 м/с; напряжение источника питания 200 В.
В Японии департаментом государственных железных дорог проведены испытания двигателей, спроектированных для привода вагонов. За основную базовую модель взят электродвигатель М100 [148, 149].
В 1970 г. опубликован японский проект постройки в течение 70-х гг. поезда с магнитным подвешиванием и линейным асинхронным тяговым двигателем для движения со скоростью 480 км/ч. Исследования INR показали, что сцепление стального колеса со стальным рельсом сохраняется в средних условиях лишь до скорости порядка 340 км,/ч. Японскими исследователями установлены и другие факторы, ограничивающие использование колесного подвижного состава при очень высоких скоростях движения.
На основании обширных исследований и сравнения предложенных в различных странах способов обеспечения сверхвысоких скоростей движения наземного транспорта, специалисты INR признали наиболее приемлемым на проектируемой линии магнитное подвешивание вагонов и линейный асинхронный тяговый двигатель. Модель такого поезда демонстрировалась на ЭКСПО-70, поддерживалась во взвешенном состоянии на высоте 10 мм посредством системы постоянных магнитов [142].
Вагон поезда с пассажирами потребуется поднимать на высоту порядка 300 мм. Как показали исследования INR, рассчитывать на постоянный магнит при этом не приходится, так как он будет чрезвычайно тяжелым. Специалисты INR намерены преодолеть это затруднение, используя электромагниты, выполненные на базе сверхпроводников [142]. Подвижной состав с системой магнитного подвешивания может двигаться со скоростью до 500 км/ч. Поскольку в настоящее время принципиальные технические проблемы уже решены (например, созданы более мощные и сложные электромагниты, чем это необходимо для указанных целей), полагают, что транспорт с магнитным подвешиванием будет реализован в Японии уже через 10 лет.
Япония вынуждена заниматься исследованиями в этой области, потому что наиболее совершенная железная дорога Токайдо (длина 515 км, скорость движения 200 км/ч) исчерпает свои возможности к 1980 г.·; стоимость строительства этой железной дороги составила в 1963 г. 1 млрд. долл., ежегодная прибыль составляет 300 млн. при эксплуатационных расходах 600 млн. долл.
Строительство вместо дороги Токайдо транспортного сообщения с магнитным подвешиванием обошлось бы в 300 млн. долл. [107, 114].
В 1972 г. опубликованы сведения о создании экспериментального вагона с системой магнитного подвешивания, где в качестве тягового двигателя используется линейный асинхронный двигатель [143, 149].
Модель такого поезда, уменьшенная в пять раз, недавно прошла испытания (рис. 2, 3). Ее корпус имеет обтекаемую форму, 7 м в длину и 2,5 м в ширину, высота его 2 м.
Во время испытаний модель, пройдя 50 м от места начала движения, приподнялась над полотном на 6 см и продолжала движение по воздуху.
Предполагается построить отрезок в 7 км для испытания модели, которая будет всего в два раза меньше настоящего поезда [58].